






示波器:普源MSO7054
电源:艾德克斯IT633A
测试背景:主要是为了抓取MCU控制器的上下电各个GPIO的波形
import time
import serial
import pyvisa
def init_scope(chL):
scope.write(':TRIGger:EDGE:SOURce CHANnel{0}'.format(chL)) # 设置trigger channel 1,2,3,4依次使用
scope.write('TRIG:EDGE:LEV 1.1') # 设置边沿触发1.1V
scope.write(':TRIGger:MODE EDGE') # 设置触发模式为边沿触发
scope.write(':TIMebase:MODE MAIN') # 设置模式为MAIN就是为YT模式
scope.write(':TIMebase:MAIN:OFFSet 0') # 设置触发起始点为时间0点
scope.write(':TIMebase:MAIN:SCALe 0.002') # 设置屏幕的时间坐标轴每格0.002s
def channel_enable(chL):
# channel
if chL == 1:
scope.write(':CHANnel1:BWLimit 250M') # 设置通道1带宽为250M
scope.write(':CHANnel1:COUPling DC') # 设置通道1测试模式为DC
scope.write(':CHANnel1:DISPlay ON') # 打开通道1
scope.write(':CHANnel2:DISPlay OFF') # 关闭通道2
scope.write(':CHANnel3:DISPlay OFF') # 关闭通道3
scope.write(':CHANnel4:DISPlay OFF') # 关闭通道4
scope.write(':CHANnel1:SCALe 1') # 设置纵坐标为1V每格
scope.write(':CHANnel1:OFFSet -1') # 设置起始值为-1V
scope.write(':CHANnel1:IMPedance OMEG') # 设置阻抗为1Mohm
scope.write(':CHANnel1:PROBe 10') # 设置探棒比例为1比10
scope.write(':MEASure:ITEM VPP,CHANnel1') # 打开通道1的测量VPP
scope.write(':MEASure:ITEM VMAX,CHANnel1') # 打开通道1的测量VMAX
scope.write(':MEASure:ITEM VMIN,CHANnel1') # 打开通道1的测量VMIN
scope.write(':MEASure:ITEM FREQuency,CHANnel1') # 打开通道1的测量FREQuency
scope.write(':MEASure:ITEM PERiod,CHANnel1') # 打开通道1的测量PERiod
elif chL == 2:
scope.write(':CHANnel2:BWLimit 250M')
scope.write(':CHANnel2:COUPling DC')
scope.write(':CHANnel2:DISPlay ON')
scope.write(':CHANnel1:DISPlay OFF')
scope.write(':CHANnel3:DISPlay OFF')
scope.write(':CHANnel4:DISPlay OFF')
scope.write(':CHANnel2:SCALe 1')
scope.write(':CHANnel2:OFFSet -1')
scope.write(':CHANnel2:IMPedance OMEG')
scope.write(':CHANnel2:PROBe 10')
scope.write(':MEASure:ITEM VPP,CHANnel2')
scope.write(':MEASure:ITEM VMAX,CHANnel2')
scope.write(':MEASure:ITEM VMIN,CHANnel2')
scope.write(':MEASure:ITEM FREQuency,CHANnel2')
scope.write(':MEASure:ITEM PERiod,CHANnel2')
elif chL == 3:
scope.write(':CHANnel3:BWLimit 250M')
scope.write(':CHANnel3:COUPling DC')
scope.write(':CHANnel3:DISPlay ON')
scope.write(':CHANnel1:DISPlay OFF')
scope.write(':CHANnel2:DISPlay OFF')
scope.write(':CHANnel4:DISPlay OFF')
scope.write(':CHANnel3:SCALe 1')
scope.write(':CHANnel3:OFFSet -1')
scope.write(':CHANnel3:IMPedance OMEG')
scope.write(':CHANnel3:PROBe 10')
scope.write(':MEASure:ITEM VPP,CHANnel3')
scope.write(':MEASure:ITEM VMAX,CHANnel3')
scope.write(':MEASure:ITEM VMIN,CHANnel3')
scope.write(':MEASure:ITEM FREQuency,CHANnel3')
scope.write(':MEASure:ITEM PERiod,CHANnel3')
elif chL == 4:
scope.write(':CHANnel4:BWLimit 250M')
scope.write(':CHANnel4:COUPling DC')
scope.write(':CHANnel4:DISPlay ON')
scope.write(':CHANnel1:DISPlay OFF')
scope.write(':CHANnel2:DISPlay OFF')
scope.write(':CHANnel3:DISPlay OFF')
scope.write(':CHANnel4:SCALe 1')
scope.write(':CHANnel4:OFFSet -1')
scope.write(':CHANnel4:IMPedance OMEG')
scope.write(':CHANnel4:PROBe 10')
scope.write(':MEASure:ITEM VPP,CHANnel4')
scope.write(':MEASure:ITEM VMAX,CHANnel4')
scope.write(':MEASure:ITEM VMIN,CHANnel4')
scope.write(':MEASure:ITEM FREQuency,CHANnel4')
scope.write(':MEASure:ITEM PERiod,CHANnel4')
return
def power_up_edge():
for i in range(1, 5):
channel_enable(i) # 打开对应的测试通道
scope.write('TRIG:EDGE:SLOP POS') # 设置触发为上升沿
init_scope(i) # 示波器初始化
time.sleep(3) # 等待时间3s
scope.write(':TRIGger:SWEep SINGle') # 设置触发为single单次触发
time.sleep(5) # 等待时间5s
ser.write(b'OUTP ON\n') # 起电
time.sleep(3) # 等待3s,但是如果上电后3s没有波形,它是抓不到的
scope.write(':SAVE:IMAGe D:/1-Test/CAN/UP{0}A.png'.format(i)) # 保存抓取到的图形,保持到对应的地址下
time.sleep(5) # 等待5s
scope.write(':MEASure:CLEar ALL') # 清除所有测量值
ser.write(b'OUTP OFF\n') # 关闭电源
def power_down_edge():
for i in range(1, 5):
channel_enable(i)
scope.write('TRIG:EDGE:SLOP NEG') # 设置触发为下降沿
init_scope(i)
ser.write(b'OUTP ON\n')
time.sleep(3)
scope.write(':TRIGger:SWEep NORM') # 设置触发为normal多次触发
scope.write('TRIG:EDGE:LEV 0.15') # 设置边沿触发0.15V
scope.write(':TIMebase:MAIN:OFFSet 0.04') # 设置初始位置为0.04s
scope.write(':TIMebase:MAIN:SCALe 0.04') # 设置每格为0.04s
time.sleep(3)
ser.write(b'OUTP OFF\n')
time.sleep(5)
scope.write(':SAVE:IMAGe D:/1-Test/CAN/DOWN{0}A.png'.format(i))
time.sleep(8)
scope.write(':MEASure:CLEar ALL')
def power_hold_edge():
for i in range(1, 5):
time.sleep(3)
ser.write(b'OUTP ON\n')
channel_enable(i)
init_scope(i)
scope.write('TRIG:EDGE:SLOP POS')
scope.write(':TIMebase:MAIN:SCALe 0.0001')
time.sleep(2)
scope.write(':TRIGger:SWEep AUTO') # 设置测试模式为AUTO实时模式
time.sleep(3)
scope.write(':SAVE:IMAGe D:/1-Test/CAN/Hold{0}A.png'.format(i))
time.sleep(8)
scope.write(':MEASure:CLEar ALL')
def Roll_mode_test():
for i in range(1, 5):
scope.write(':RUN')
channel_enable(i)
time.sleep(4)
scope.write(':TIMebase:MODE ROLL') # 设置运行模式有YT改为ROLL模式
scope.write(':TIMebase:MAIN:SCALe 2')
time.sleep(9)
ser.write(b'OUTP ON\n')
time.sleep(9)
ser.write(b'OUTP OFF\n')
time.sleep(6)
scope.write(':STOP') # 示波器暂停
scope.write(':SAVE:IMAGe D:/1-Test/CAN/Roll{0}A.png'.format(i))
time.sleep(10)
scope.write('*RST') # 示波器初始化
time.sleep(10)
##MAIN =======================================================================
# 初始化接口
rm = pyvisa.ResourceManager()
scope = rm.open_resource('USB0::0x1AB1::0x0514::DS7F241300147::INSTR') # 确保USB地址对应你的示波器地址
scope.write('*RST')
time.sleep(8)
scope.write(':DISPlay:RULers ON') # 打开示波器横纵坐标的标尺
time.sleep(2)
scope.write(':STOP')
print("Scope is OK")
ser = serial.Serial()
ser.port = 'COM8'
ser.baudrate = 9600
ser.open()
ser.write(b'VOLT 24\n')
ser.write(b'OUTP OFF\n')
print("Serial is OK")
# ======
Roll_mode_test()
power_up_edge()
scope.write('*RST')
time.sleep(10)
power_down_edge()
power_hold_edge()
ser.write(b'OUTP OFF\n')
print("Test is Done")实践中发现有很多问题:
1,时间控制不好(可以通过更改s/div),有些GPIO口的上电(这个上升沿)需要很长的时间,有些管脚上电很快所有该程序不一定可以cover 所有的应用场景。
2,有些管脚动作要等很长时间才会上电,就不一定能过抓取到,有比较大的局限性(这个就要根据实际情况改变等待时间)
3,下电瞬间不好抓取,尤其是信号管脚,他一直在发送的信号就有下降沿,抓不到最后的瞬间,只能有roll mode的图片代替了。
4,Roll mode下测的信号很容易受到测量环路的影响,噪声很大,要先办法规避,地尽量选择近一点
5,探棒使用的时候需要注意尽量使用原装的,用其他的牌子的探棒尤其是那种可以从1:1 转换成1:10的那种很容易设定结束出现1:100的情况。
一、设备通过USB连接
rm = pyvisa.ResourceManager()
scope = rm.open_resource('USB0::0x1AB1::0x0514::DS7F241300147::INSTR') # 确保USB地址对应你的示波器地址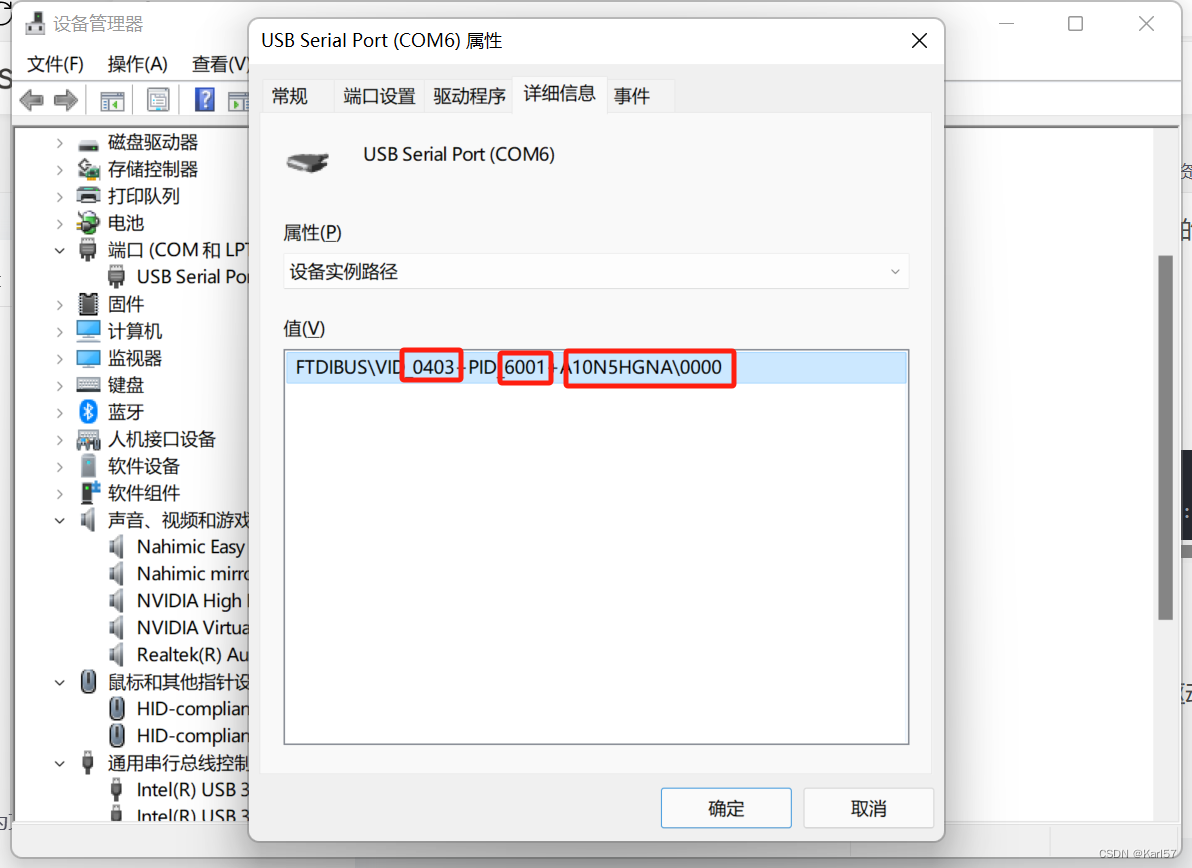
可以在驱动的详细信息里面的设备实例路径下找到,上图并非示波器的驱动VID和PID。
二、设备驱动安装
需要安装IVI VISA的驱动,可以去NI的官网找,这个驱动,安装之后基本上很多可编程设备都可以直接用
三、示波器编程手册
MSO7000-普源精电科技-RIGOL TECHNOLOGIES, Co. LTD
手册都是中文对新手很友好。
总结:
本程序还有很多值得优化的地方,比较应用场景比较单一,只能由于测一测GPIO控制管脚的上下电瞬间的波形。欢迎同道多多指正

















 352
352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









