






simulink打包控制算法库(遗传算法pid 自抗扰控制 LQR最优跟踪控制器等)
可加载至library中
含一份控制算法库总结文档
ID:62300697597004044
啦啦啦啦啦
在软件开发领域,Simulink是一种广泛使用的图形化建模和仿真环境,被广泛应用于控制系统设计和开发过程中。它的一个重要特点是可以将控制算法打包成库,并加载到Simulink的library中供重复使用。本文将围绕这一主题展开,详细介绍Simulink打包控制算法库的方法以及包含的一份控制算法库总结文档。
首先,Simulink打包控制算法库的过程是非常简单的。用户可以通过将算法的功能组件封装成独立的模块,然后导出为独立的库文件,最后将该库文件加载到Simulink的library中。这样一来,无论是初学者还是有经验的开发者,都可以方便地使用这些控制算法,提高开发效率和代码的可重用性。
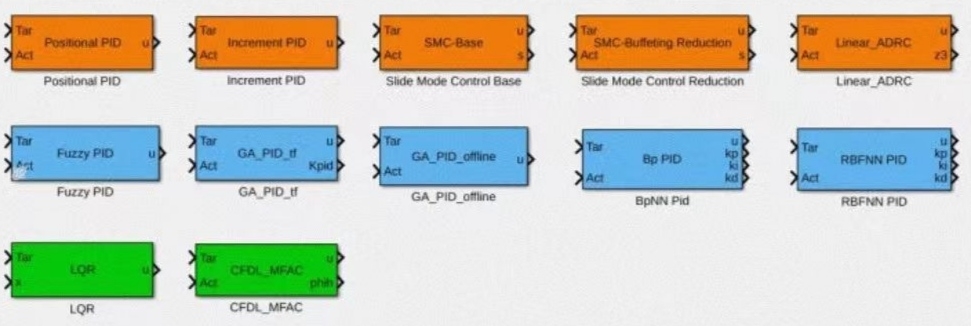
在实际的应用中,Simulink打包的控制算法库可以包含多种常见的控制算法,例如遗传算法PID控制器、自抗扰控制、LQR最优跟踪控制器等。这些算法都有其特定的设计和应用领域,可以根据具体的控制需求进行选择和使用。
遗传算法PID控制器是一种基于生物进化原理的优化算法,通过模拟自然选择和遗传变异的过程,优化PID控制器的参数以达到系统最优性能。这种算法在复杂、非线性的系统中表现出色,能够提供稳定而高效的控制效果。
自抗扰控制是一种针对外部扰动和模型不确定性的控制方法。它通过引入补偿机制,能够抵消外部扰动对系统的影响,提高系统的鲁棒性和抗干扰能力。在诸如飞行器、机器人等需要稳定性和鲁棒性的系统中,自抗扰控制算法具有广泛的应用前景。
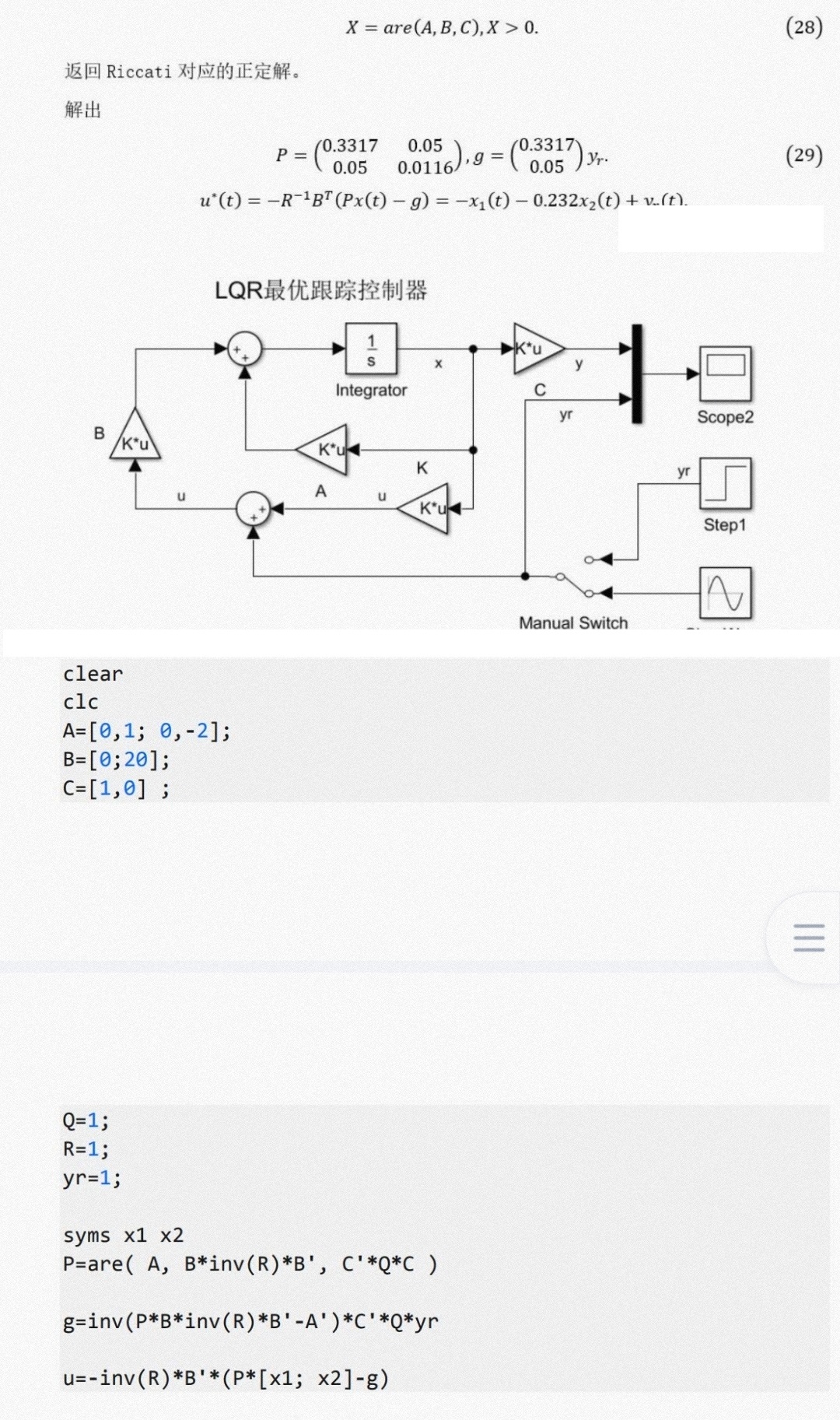
LQR最优跟踪控制器是一种基于线性二次型优化准则的控制方法。它通过最小化系统状态和控制输入的二次型性能指标,实现对系统的最优控制。LQR最优跟踪控制器在需要快速响应和高精度控制的系统中表现出色,例如机器人路径跟踪、自动驾驶等。
以上这些控制算法可以通过Simulink打包成控制算法库,并加载到Simulink的library中,供开发者使用。这样的库能够极大地减少开发者的工作量,提高开发效率,同时也保证了代码的可重用性和一致性。开发者只需要简单地拖拽这些控制算法模块到Simulink的工作区,再根据实际需求进行参数配置,即可完成
【相关代码,程序地址】:http://fansik.cn/697597004044.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









