







 本文详细介绍了回溯法和分支限界法这两种算法,阐述了它们的基本思想和应用场景。回溯法通过深度优先搜索解空间树,遇到无效路径时回溯,常用于子集树和排列树问题。分支限界法则以广度优先或最小耗费优先搜索解空间,目标是找到最优解。文中通过子集求和、全排列、汉密尔顿环和布线问题等实例,解释了两种方法的实现和应用。
本文详细介绍了回溯法和分支限界法这两种算法,阐述了它们的基本思想和应用场景。回溯法通过深度优先搜索解空间树,遇到无效路径时回溯,常用于子集树和排列树问题。分支限界法则以广度优先或最小耗费优先搜索解空间,目标是找到最优解。文中通过子集求和、全排列、汉密尔顿环和布线问题等实例,解释了两种方法的实现和应用。
回溯法
回溯法(探索与回溯法)是一种选优搜索法,又称为试探法,按选优条件向前搜索,以达到目标。但当探索到某一步时,发现原先选择并不优或达不到目标,就退回一步重新选择,这种走不通就退回再走的技术为回溯法。
基本思想:
在包含问题的所有解的解空间树中,按照深度优先搜索的策略,从根结点出发深度探索解空间树。当探索到某一结点时,要先判断该结点是否包含问题的解,如果包含,就从该结点出发继续探索下去,如果该结点不包含问题的解,则逐层向其祖先结点回溯。(其实回溯法就是对隐式图的深度优先搜索算法)。 若用回溯法求问题的所有解时,要回溯到根,且根结点的所有可行的子树都要已被搜索遍才结束。 而若使用回溯法求任一个解时,只要搜索到问题的一个解就可以结束。
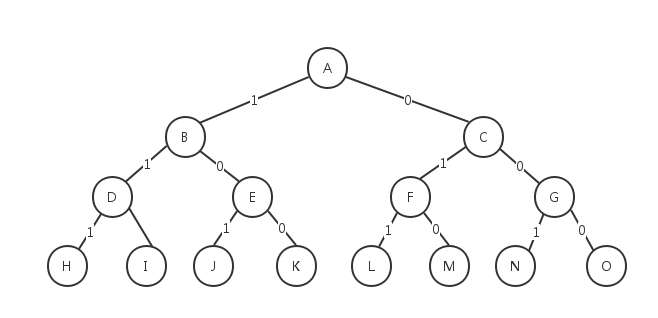
一句话:回溯法最重要的是对解空间树有大致的了解,然后深度遍历解空间树,为了节省时间,还需要进行必要的剪枝操作。如下图所示,就是01背包问题n=3(3样物品时)的解空间树。
回溯法解题的时候常遇到两种类型的解空间树:子集树(选择问题)与排列树(排列问题)。当所给的问题是从n个元素的集合S中找出满足某种性质的子集时相应的空间就是子集树。当所给的问题是确定n个元素满足某种性质的排列时,相应的解空间树就是排列树。
用回溯法搜索子集树的一般算法课描述如下:
void Backtrack(int t)
{
if(t>n)
Output(x);
else
for(i=0;i<=1;i++)
{
x[t]=i;
//Constarint(t)和Bound(t)表示当前的约束函数和限界函数
if(Constarint(t)&&Bound(t))
Backtrack(t+1);
}
}用回溯法搜索排列树的算法框架可描述如下:
void Backtrack(int t)
{
if(t>n)
Output(x);
else
for(i=t;i<=n;i++)
{
swap(x[t],x[i]); //swap作用是交换两个元素
//Constarint(t)和Bound(t)表示当前的约束函数和限界函数
if(Constarint(t)&&Bound(t))
Backtrack(t+1);
swap(x[t],x[i]);
}
} 在子集树中,t含义是当前函数在解空间树搜索中相应的层数。
现在我们根据这两个模板分别举两个例子。
首先是子集树相关的定向子集求和问题。
描述: 给一个集合,求出和为某一固定数的子集
设计思想:利用回溯法,树的每一个节点包括1当前和2层数3剩余所有值之和。关键在于剪枝,若加上下一层的数的和小于所要求的和,则进入左子树,否则一定不可能,左子树便不生成。若减掉当前层数的再加上剩余所有数后的值依然小于所要求的和,那么右子树不生成,否则生成右子树,最后当某一层和等于所要求的和时成立并输出(中间用x[]数组来记录是否选中此数,0为未选中,1为选中)。
根据设计思想和子集树模板,我们可以写出如下算法代码:
//定向子集求和问题,假设给定W={5,10,12,13,15,18},S=30
#define maxsize 7
#include <IOSTREAM>
using namespace std;
int S=30;
int num=0;
int x[maxsize]={
0};
int W[maxsize]={
0,5,10,12,13,15,18}; //0号元素不用
void Backtrack(int sum,int k,int r) //sum为当前的和,k为层数(第几个数),r为剩余数的和
{
if (sum+W[k]==S)
{
num++;
cout<<"("<<num<<"):";
cout<<"S=";
for (int i=1;i<=k;i++)
{
if(x[i]==1)
{
cout<<W[i]<<"+";
}
else
continue;
}
cout<<W[k];
cout<<endl;
}
else if(sum+W[k]+W[k+1]<=S) //如果到下一层为止的数小于S,则进入左子树,否则一定不可能,左子树便不生成
{
x[k]=1;
Backtrack(sum+W[k],k+1,r-W[k]);
}
if (sum+r-W[k]>=S) //如果减掉当前层数的再加上剩余所有数后的值依然小于30,那么右子树不生成,否则生成
{
x[k]=0;
Backtrack(sum,k+1,r-W[k]);
}
}
int main()
{
cout<<"定向子集求和问题,给定物品重量W={5,10,12,13,15,18},找出和为S=30的子集。"<<endl;
Backtrack(0,1,73); 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









