






基于分布式驱动电动汽车的四轮侧偏刚度估计,采用容积卡尔曼(ckf)进行估计,能够很好地估计汽车行驶过程中的侧偏刚度,并与转化的侧向轮胎力进行比较,具有很好的估计效果。
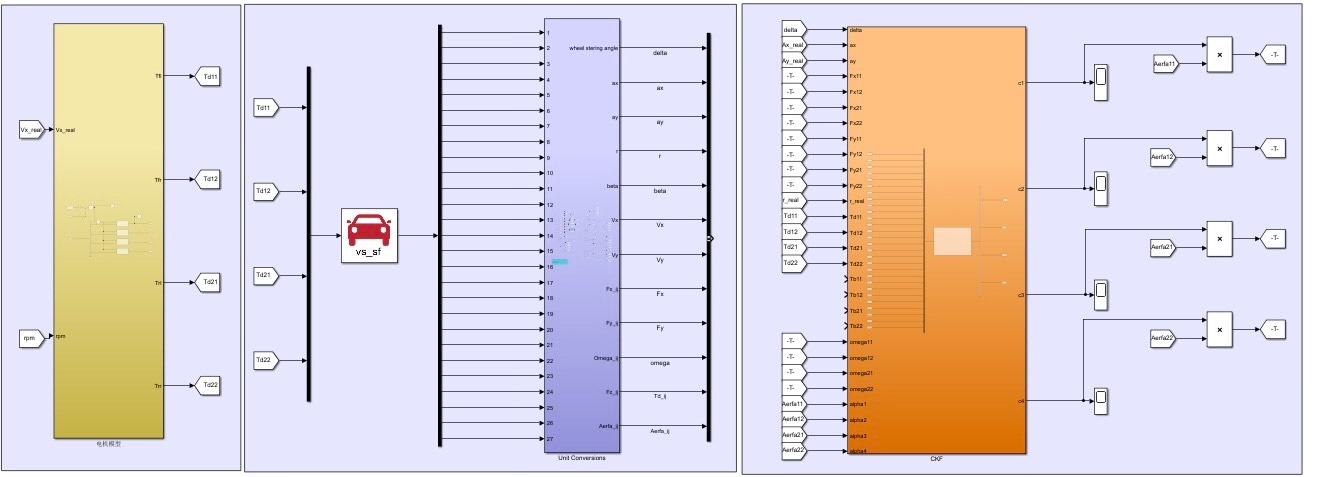
模型中第一个模块是四轮驱动电机;第二个模块是carsim输出的真实参数,包括汽车所受横向力,纵向力,驱动力矩等:第三个模块是关于ckf的四轮侧偏刚度估计。
模型和代码完全是由自己亲手编写,可供自己参考和学习。
本模型是基于simulink与carsim联合仿真,ckf是由s function进行编写,提供相关文献
ID:69400695562666242
嚣张的奥利奥
基于分布式驱动电动汽车的四轮侧偏刚度估计
摘要:本文介绍了一种基于分布式驱动电动汽车的四轮侧偏刚度估计方法,采用容积卡尔曼(CKF)进行估计,能够很好地估计汽车行驶过程中的侧偏刚度,并与转化的侧向轮胎力进行比较,具有很好的估计效果。本文主要包括三个模块:四轮驱动电机模块、Carsim输出的真实参数模块和关于CKF的四轮侧偏刚度估计模块。通过自主编写的模型和代码,实现了自主仿真,可供读者参考和学习。
关键词:分布式驱动电动汽车,四轮侧偏刚度估计,容积卡尔曼,仿真模型,代码编写
-
引言
随着电动汽车技术的快速发展,分布式驱动技术在电动汽车中得到广泛应用。分布式驱动电动汽车在行驶过程中面临着诸多挑战,其中之一就是侧偏刚度的估计。侧偏刚度是指汽车在转弯时发生侧向滑移的能力,是评估车辆稳定性和操控性的重要指标。因此,准确估计分布式驱动电动汽车的侧偏刚度对于提高车辆的操控性和安全性具有重要意义。 -
系统概述
本文采用容积卡尔曼(CKF)作为估计方法,通过对四轮驱动电动汽车的车辆动力学参数进行估计,进而估计侧偏刚度。系统整体结构如图1所示。
[图1:系统整体结构]
- 四轮驱动电机模块
在分布式驱动电动汽车中,四个轮胎都配备有独立的电机,通过控制电机的工作状态,可以实现车辆的横向力控制。四轮驱动电机模块主要包括电机控制器和电机参数估计两个子模块。
3.1 电机控制器
电机控制器负责接收来自上层控制器的指令,通过控制电机的转速和扭矩,实现车辆的横向力控制。电机控制器的设计需要考虑到车辆动力学的特性和电机的特性,通过合理的控制策略,实现车辆的稳定性和操控性。
3.2 电机参数估计
为了实现侧偏刚度的估计,需要准确估计四个电机的参数。通过在实际车辆上进行测试和采集数据,可以获取电机的转矩-转速特性曲线和电机的电驱特性曲线。通过对采集到的数据进行处理和分析,可以得到准确的电机参数。
-
Carsim输出的真实参数模块
Carsim是一种车辆动力学仿真软件,可以模拟车辆在不同工况下的动力学特性。在本研究中,我们使用Carsim输出的真实参数作为侧向轮胎力的参考。通过与侧偏刚度估计得到的结果进行比较,可以评估侧偏刚度估计的准确性。 -
关于CKF的四轮侧偏刚度估计模块
CKF是一种基于卡尔曼滤波的估计方法,能够有效地处理非线性系统的估计问题。在本文中,我们对四轮驱动电动汽车的侧偏刚度进行估计时,采用了CKF方法。
5.1 CKF算法原理
CKF算法是一种基于卡尔曼滤波的非线性系统估计方法。通过将非线性系统模型线性化为一组线性系统模型,然后使用卡尔曼滤波进行估计。CKF算法的主要步骤包括:状态预测、状态更新和状态估计。
5.2 四轮侧偏刚度估计
在CKF的四轮侧偏刚度估计模块中,我们将车辆动力学参数和Carsim输出的真实参数作为输入,通过CKF算法对侧偏刚度进行估计。估计结果与转化的侧向轮胎力进行比较,可以评估估计效果的准确性。
-
实验结果与分析
通过自主编写的模型和代码,我们进行了一系列仿真实验,并对实验结果进行了分析。实验结果表明,基于分布式驱动电动汽车的四轮侧偏刚度估计方法在估计精度和准确性方面表现出很好的效果。 -
结论
本文介绍了一种基于分布式驱动电动汽车的四轮侧偏刚度估计方法,采用容积卡
【相关代码 程序地址】: http://nodep.cn/695562666242.html















 578
578











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









