







 针对弹道目标微动分类和RCS序列分类的问题,提出了一种结合RCS和深度学习的智能分类算法。通过RCS序列和小波变换时频图构建数据集,利用CNN提取时频图像特征,再与RCS序列融合,通过BiLSTM网络进行目标分类。实验结果显示,该算法在提高分类精度和速度方面优于CNN和SVM。
针对弹道目标微动分类和RCS序列分类的问题,提出了一种结合RCS和深度学习的智能分类算法。通过RCS序列和小波变换时频图构建数据集,利用CNN提取时频图像特征,再与RCS序列融合,通过BiLSTM网络进行目标分类。实验结果显示,该算法在提高分类精度和速度方面优于CNN和SVM。
关注微信公众号:人工智能技术与咨询。了解更多资讯!
来源:系统工程与电子技术,作者李江等
摘要
针对弹道目标微动分类前需平动补偿及典型雷达散射截面积(radar cross-section, RCS)序列分类需构造人工特征的问题,提出利用弹道目标微动特性和RCS相结合的弹道目标智能分类算法。首先,建立弹道目标运动模型并分析得到方位角和俯仰角,从而获取RCS序列,在此基础上利用小波变换得到时频图并构建数据集;然后,通过卷积神经网络(convolutional neural network, CNN)提取时频图像特征序列并与RCS序列融合成高维特征;最后,利用具有容错能力的双向长短期记忆网络充分学习序列之间的相关性以实现目标分类。仿真结果表明,该算法比卷积神经网络和支持向量机的分类精度分别提高5%和2%以上,分类速度比卷积神经网络和双向长短期记忆网络分别提高1.5倍和2.5倍,实现了更高精度的快速智能分类。
0 引言
弹道导弹作为一种进攻性极强的战略武器,一直是各国重点研究和发展的对象。近年来,随着分导式多弹头、诱饵干扰等突防技术的不断改进[1-2],弹道导弹的拦截越发困难,而弹道目标的正确识别对于反导作战意义重大。不同类型的弹道目标有着不同的运动方式,而目标雷达散射截面积(radar cross-section, RCS)与目标形状、运动姿态、体积大小等因素有关,包含了丰富的目标信息[3-4],可以为弹道目标识别提供有效途径。
典型的空间目标识别技术主要从微动特征[5-6]、RCS特征[7-8]、高分辨距离像[9-10]、逆合成孔径图像[11-12]等方面入手。文献[5-6]都是基于微多普勒频率的空间锥体目标微动分类,在需要平动补偿的基础上仅针对高频雷达,具有一定的局限性,且文献[5]采用人工提取特征,容易引入人为误差影响分类性能。文献[7-8]利用RCS幅值序列的统计特征进行弹道目标识别。文献[9]通过核联合判别分析法提取高分辨距离像的特征进行飞机目标识别,虽然取得了不错的效果,但这些特征的构造需要一定的先验知识,通用性有待探讨。因此,有必要研究智能化处理方法。
近年来,深度学习作为一种智能方法已经广泛应用于雷达目标识别领域[13-17]。如文献[13]通过卷积神经网络(convolutional neural network, CNN)处理进动目标的高分辨距离剖面图实现目标分类,并与支持向量机(support vector machine, SVM)的分类方法对比,体现了CNN分类性能的优越性。文献[14]利用CNN中的深度残差网络对高分辨率合成孔径雷达图像处理实现船舶分类。文献[15]利用深度置信网络处理雷达高分辨距离像实现目标分类。
针对微动分类过程需要平动补偿及典型RCS序列分类需构造人工特征的问题,提出基于RCS的CNN与双向长短期记忆(bidirectional long short-term memory, BiLSTM)网络相结合的CNN+BiLSTM智能分类算法。该算法可无监督地在RCS序列和时频图图像中提取高维特征,从而强化特征并减少迭代次数,在提高精度的同时避免了CNN和BiLSTM网络因多次反复迭代而导致的分类速度慢的问题,可实现快速高精度智能分类。
1 空间目标姿态角建模分析
弹道中段除了弹头外,还包括诱饵、燃料箱、各种碎片等伴飞物,是反导防御的重点[18]。因此,需基于弹道中段进行目标建模分析。
1.1 弹头运动模型
在较短的观察时间,可用曲线轨道近似实际的平动椭圆弹道[19]。运动模型如图1所示。建立如图1(a)所示的锥体弹头目标模型,以锥体无微动点O为坐标原点建立参考坐标系O-XYZ,锥旋轴为X轴,雷达视线位于OXZ面,且与X轴夹角为雷达视线角η,与自旋轴x轴夹角为姿态角γ, x轴与X轴夹角为章动角θ,锥旋角速度取值为ωφ,初始t0时刻自旋轴位于面OXY,同时以O为坐标原点建立本地坐标系O-xyz。
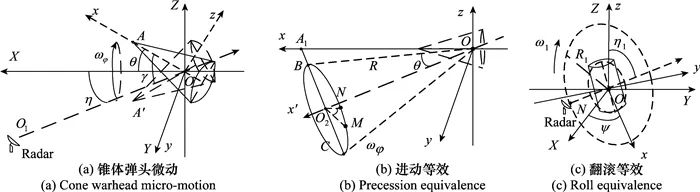
图1 运动模型
Fig.1 Motion model
1.1.1 旋转(自旋)模型
弹头自旋时,其雷达俯仰角和方位角仅由弹道位置决定。记t时刻雷达在参考坐标系中坐标为St=[xt, yt, zt],其初始观察位置决定雷达视线角,结合弹道曲线即可求得雷达方位角α和俯仰角β。
(1)$\alpha = \arctan \left( { {y_t}/{x_t}} \right)$
(2)$\beta = \arctan \left( { {z_t}/\sqrt {x_t^2 + y_t^2} } \right)$
1.1.2 进动模型
进动时章动角θ为常数[5], 图1(a)中记初始t0时刻雷达位于点O1且$O{O_1} = R = \sqrt { {x_t}_{ { {_0}^2}} + {y_t}_{ { {_0}^2}} + {z_t}_{ { {_0}^2}}} $,此时OO1相对于OA做圆锥运动且半锥角为θ,如图1(b)所示。圆锥O-BMC与面Oxy交于面A1OC, N、M分别为t0、t时刻雷达所对应的点。先假设θ<η,由文献[20]知∠A1OC=η+θ、∠A1OB=η-θ,引入欧拉旋转矩阵[21],将雷达做圆锥运动的中心轴围绕Oy轴由Ox′旋转至Ox,结合平动得t时刻雷达等效点M的坐标为
(3)$\left\{ {\begin{array}{*{20}{l}}{ {M_y} = R\sin \theta \cos {\omega _\varphi }t - {x_t}}\\{ {M_z} = - R\left( {\sin \eta \cos \theta +
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









