






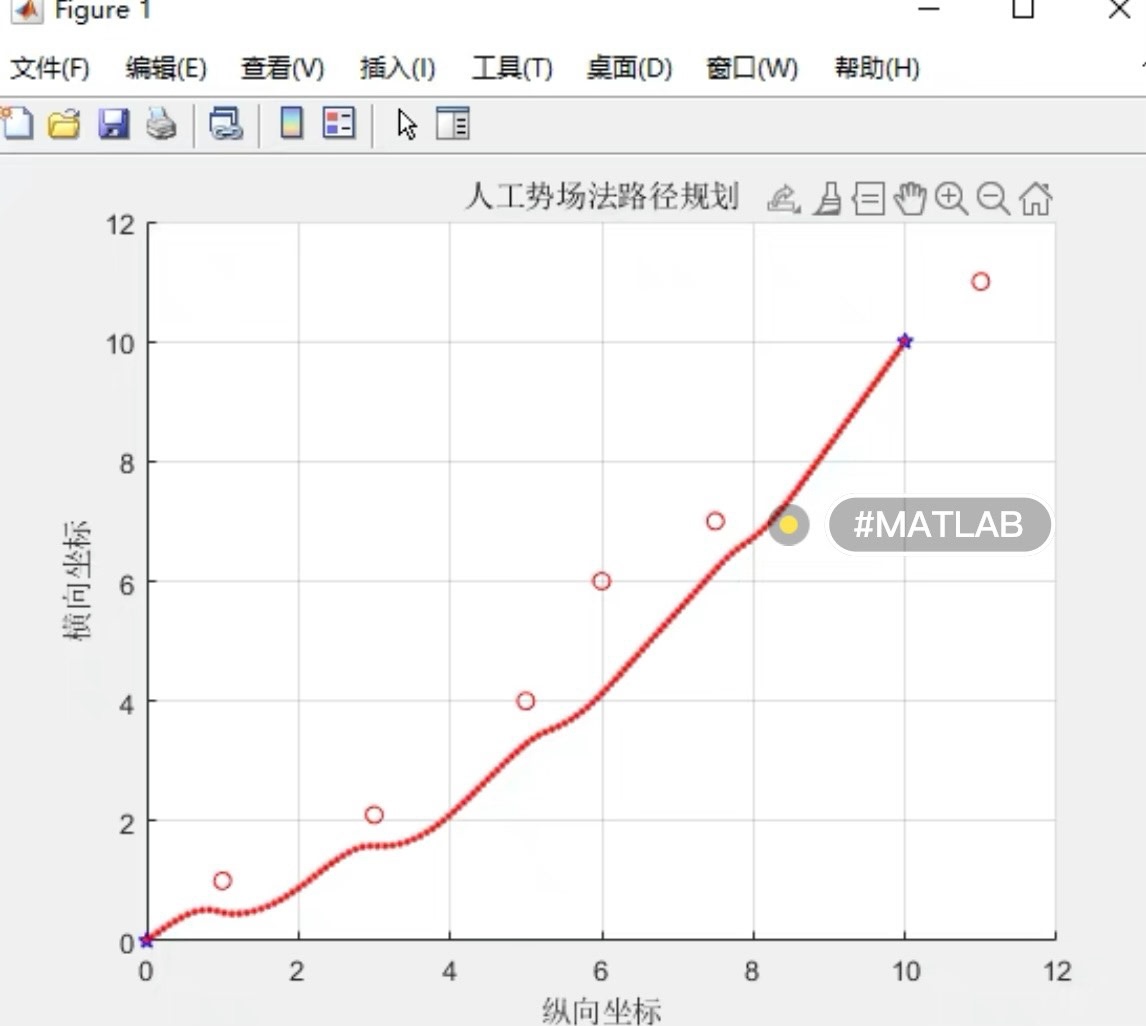
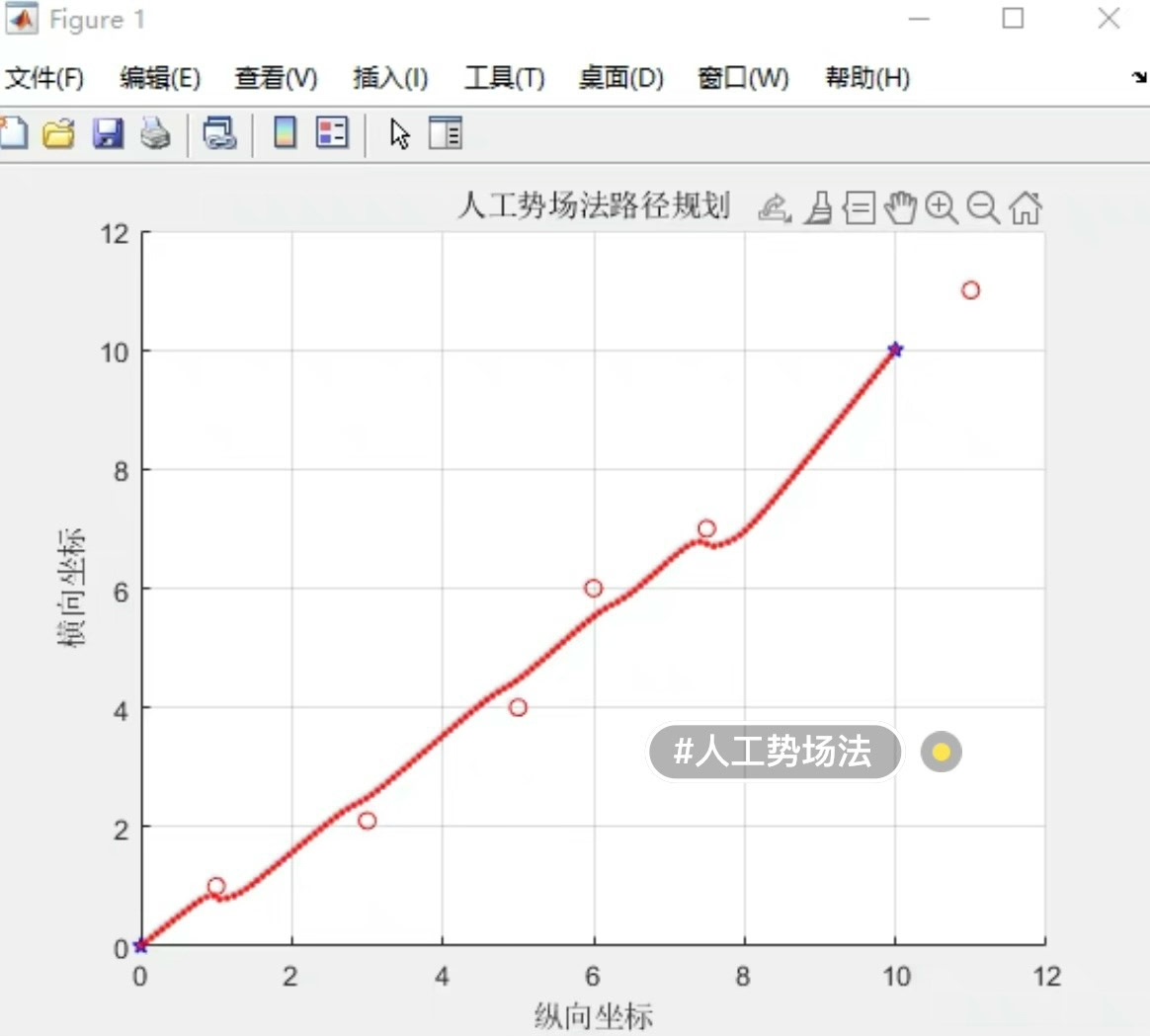
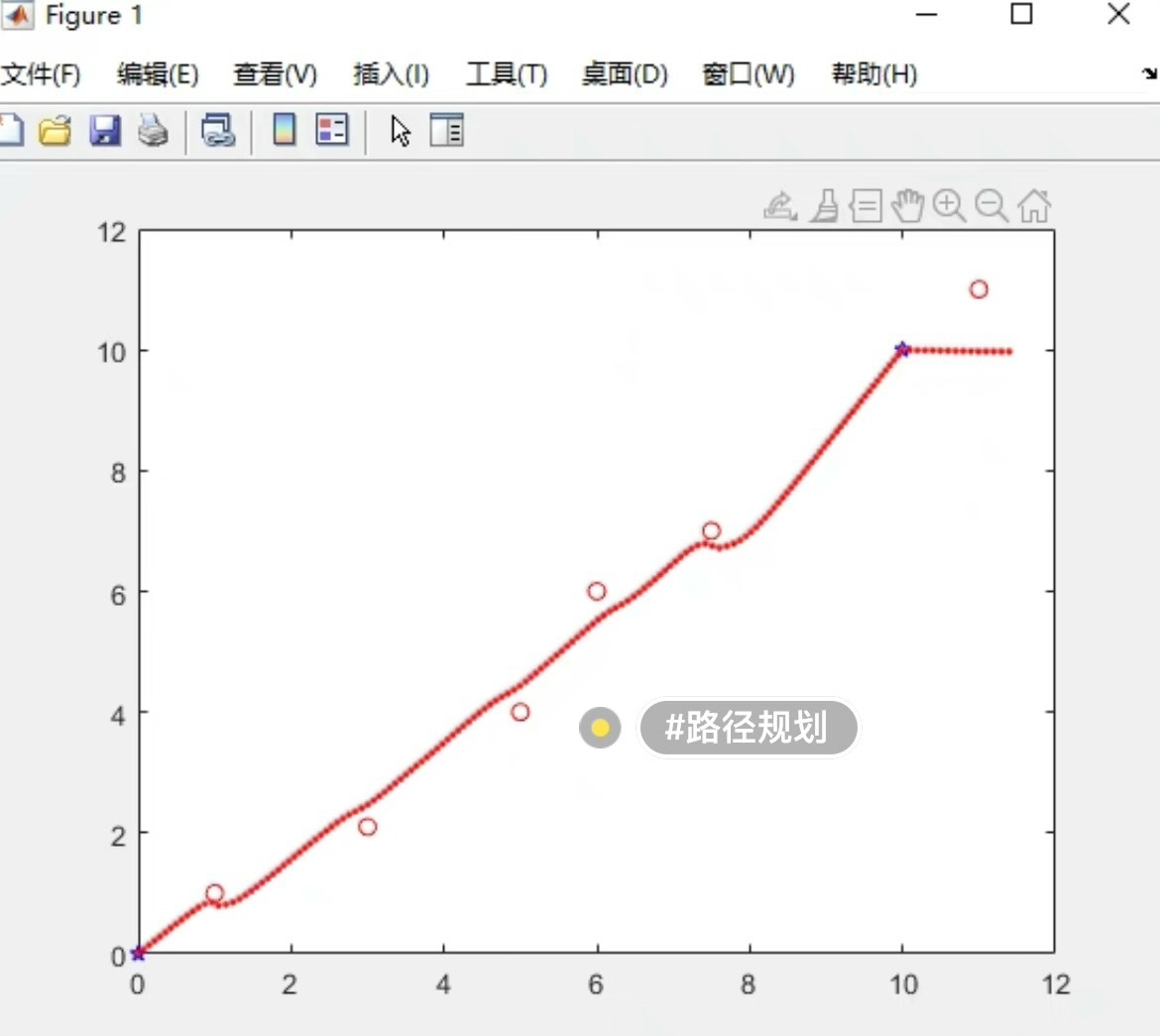
matlab路径规划算法 自己改进人工势场法 解决目标不可达问题 第一张图是没改算法之前 第二张图为改进斥力势场 第三张为改进引力势场
ID:4519719711439701
保利龙小叮当
标题:自主改进的人工势场法解决路径规划中的目标不可达问题
摘要:
本文介绍了一种基于人工势场法的路径规划算法,并对其进行了改进以解决目标不可达的问题。本文提出的算法通过引入斥力势场和引力势场,以及自主改进的策略,在保持原有算法优点的基础上,有效地解决了目标不可达的情况。通过实验结果的对比分析,验证了该算法的可行性和有效性,为实际应用提供了一种可靠的路径规划解决方案。
关键词:路径规划算法;人工势场法;目标不可达;斥力势场;引力势场
引言:
在现代自动化系统中,路径规划是一个重要的技术问题。在许多实际应用中,需要找到一条最优路径或者有效路径来连接起始点和目标点。人工势场法是一种常见的路径规划算法,通过引入势场的概念,将路径规划问题转化为力场的求解问题。然而,传统的人工势场法在处理目标不可达问题时存在一定的缺陷。本文提出了一种改进的人工势场法,通过引入斥力势场和引力势场,并采用自主改进的策略,解决了传统方法中的目标不可达问题。
人工势场法基本原理:
人工势场法将路径规划问题视为一个力场的求解问题。将机器人或其他移动物体看作是在势场中自由移动的粒子,通过斥力势场和引力势场的相互作用,找到一条从起点到目标点的最优路径。斥力势场模拟了物体之间的排斥力,使得机器人能够避开障碍物。引力势场模拟了机器人被目标点吸引的力,使得机器人朝着目标点移动。
改进的人工势场法:
在传统的人工势场法中,当目标点不可达时,机器人容易陷入局部最小值而无法到达目标点。为解决这一问题,本文提出了一种改进的斥力势场和引力势场的计算方法。首先,对斥力势场进行改进,引入自主学习算法,使机器人能够根据实时环境信息动态调整斥力场的参数。其次,在引力势场计算中,将目标点视为具有动态特性的点,根据机器人的位置和目标点的位置实时调整引力场的参数。通过这种方式,机器人在目标不可达时能够灵活调整路径,避免陷入局部最小值。
实验结果与分析:
为验证改进的人工势场法在解决目标不可达问题中的有效性,我们进行了一系列的实验。实验结果表明,改进的算法能够在目标不可达的情况下,找到一条接近最优的路径。通过与传统的人工势场法进行对比分析,我们发现改进算法在路径规划的准确性和效率方面都具有显著优势。在不同场景和复杂环境下,改进算法能够灵活地应对各种情况,具有较强的鲁棒性和泛化能力。
结论:
本文提出了一种改进的人工势场法,通过引入斥力势场和引力势场,并采用自主改进的策略,解决了传统方法中的目标不可达问题。实验结果表明,改进的算法在路径规划中具有较好的准确性和效率,能够应对各种复杂场景,并在实际应用中具有一定的可行性和可靠性。未来的工作可以进一步探索算法的优化和扩展,以满足更高级别的路径规划需求。
参考文献:
[1] Potra F A, Ptak V. Newton’s method and its use in optimization[J]. Journal of Computational and Applied Mathematics, 2000, 124(1-2): 281-302.
[2] Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research, 1986, 5(1): 90-98.
[3] Wang K, Zhang W, Lv Q. A human-inspired path planning algorithm based on modified artificial potential field[J]. Control and Decision, 2013, 28(11): 1591-1598.
[4] Zhou X, Mao Y, Li H. A modified artificial potential field algorithm based on obstacle density[J]. Mechatronics, 2015, 28: 33-44.
[5] Bhattacharya R, Ghose D, Bandyopadhyay B. Potential field based path planning with obstacle avoidance for multiple AGVs: A modified approach[J]. Robotics and Autonomous Systems, 2010, 58(12): 1295-1313.
【相关代码,程序地址】:http://fansik.cn/719711439701.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









