







UC/OS基础知识之任务的挂起和恢复
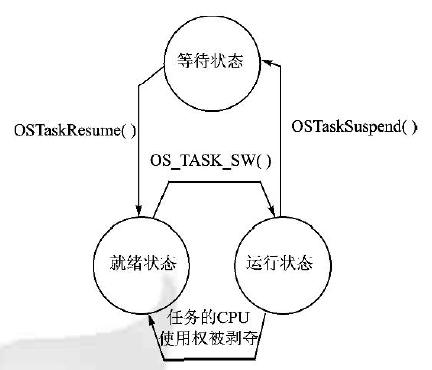
所谓挂起就是停止这个任务的运行。用户可以通过调用系统提供的OSTaskSuspend()函数来挂起除空闲任务之外的其他任务,只能在其他任务中调用恢复函数OSTaskResume()使其恢复为就绪状态。任务在运行,就绪状态和等待状态之间的转移关系如下图
1.任务的挂起
挂起任务函数OSTaskSuspend()如下所示
#if OS_TASK_SUSPEND_EN > 0
INT8U OSTaskSuspend (INT8U prio)
{
BOOLEAN self;
OS_TCB *ptcb;
INT8U y;
#if OS_CRITICAL_METHOD == 3 /* Allocate storage for CPU status register */
OS_CPU_SR cpu_sr = 0;
#endif
#if OS_ARG_CHK_EN > 0
if (prio == OS_TASK_IDLE_PRIO) { /* Not allowed to suspend idle task */
return (OS_TASK_SUSPEND_IDLE);
}
if (prio >= OS_LOWEST_PRIO) { /* Task priority valid ? */
if (prio != OS_PRIO_SELF) {
return (OS_PRIO_INVALID);
}
}
#endif
OS_ENTER_CRITICAL();
if (prio == OS_PRIO_SELF) { /* See if suspend SELF */
prio = OSTCBCur->OSTCBPrio;
self = OS_TRUE;
} else if (prio == OSTCBCur->OSTCBPrio) { /* See if suspending self */
self = OS_TRUE;
} else {
self = OS_FALSE; /* No suspending another task */
}
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { /* Task to suspend must exist */
OS_EXIT_CRITICAL();
return (OS_TASK_SUSPEND_PRIO);
}
if (ptcb == (OS_TCB *)1) { /* See if assigned to Mutex */
OS_EXIT_CRITICAL();
return (OS_TASK_NOT_EXIST);
}
y = ptcb->OSTCBY;
OSRdyTbl[y] &= ~ptcb->OSTCBBitX; /* Make task not ready */
if (OSRdyTbl[y] == 0) {
OSRdyGrp &= ~ptcb->OSTCBBitY;
}
ptcb->OSTCBStat |= OS_STAT_SUSPEND; /* Status of task is 'SUSPENDED' */
OS_EXIT_CRITICAL();
if (self == OS_TRUE) { /* Context switch only if SELF */
OS_Sched();
}
return (OS_NO_ERR);
}
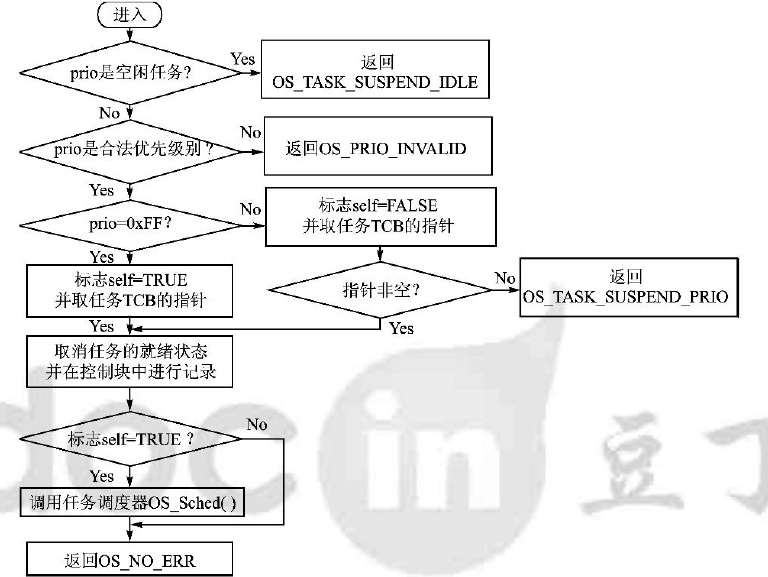
#endif任务挂起的流程图如下图所示
2.任务的恢复
任务恢复函数OSTaskResume()原型如下所示
INT8U OSTaskResume (INT8U prio)
{
OS_TCB *ptcb;
#if OS_CRITICAL_METHOD == 3 /* Storage for CPU status register */
OS_CPU_SR cpu_sr = 0;
#endif
#if OS_ARG_CHK_EN > 0
if (prio >= OS_LOWEST_PRIO) { /* Make sure task priority is valid */
return (OS_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { /* Task to suspend must exist */
OS_EXIT_CRITICAL();
return (OS_TASK_RESUME_PRIO);
}
if (ptcb == (OS_TCB *)1) { /* See if assigned to Mutex */
OS_EXIT_CRITICAL();
return (OS_TASK_NOT_EXIST);
}
if ((ptcb->OSTCBStat & OS_STAT_SUSPEND) != OS_STAT_RDY) { /* Task must be suspended */
ptcb->OSTCBStat &= ~OS_STAT_SUSPEND; /* Remove suspension */
if (ptcb->OSTCBStat == OS_STAT_RDY) { /* See if task is now ready */
if (ptcb->OSTCBDly == 0) {
OSRdyGrp |= ptcb->OSTCBBitY; /* Yes, Make task ready to run */
OSRdyTbl[ptcb->OSTCBY] |= ptcb->OSTCBBitX;
OS_EXIT_CRITICAL();
OS_Sched();
} else {
OS_EXIT_CRITICAL();
}
} else { /* Must be pending on event */
OS_EXIT_CRITICAL();
}
return (OS_NO_ERR);
}
OS_EXIT_CRITICAL();
return (OS_TASK_NOT_SUSPENDED);
}
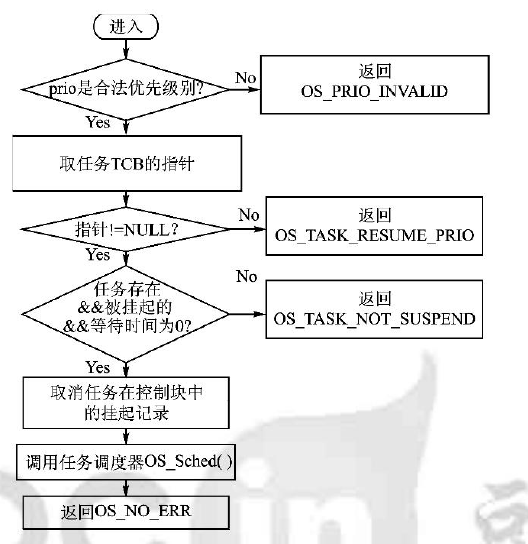
#endif任务恢复的流程图如下图所示















 1067
1067











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









