








bvh数据是结构化、层次化、以递归的形式来描述骨架信息的数据,它包含:骨架结构信息、运动描述信息。
1.骨架信息:按层级结构定义了像root、hip、leg等身体部位信息(可能会有不同的部位描述)。
我们可以对照一个bvh文件以及bvhaker软件(bvh数据可视化软件)来进行学习。
HIERARCHY
ROOT Hips
{
OFFSET 0.00 0.00 0.00
CHANNELS 6 Xposition Yposition Zposition Xrotation Yrotation Zrotation
JOINT LeftUpLeg
{
OFFSET 3.76682 0.00000 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftLeg
{
OFFSET 0.00000 -17.03178 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftFoot
{
OFFSET 0.00000 -15.72190 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftToeBase
{
OFFSET 0.00000 -1.61281 6.01911
CHANNELS 3 Xrotation Yrotation Zrotation
End Site
{
OFFSET 0.00000 0.00000 2.95275
}
}
}
}
}
JOINT RightUpLeg
{
OFFSET -3.76682 0.00000 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightLeg
{
OFFSET 0.00000 -17.03178 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightFoot
{
OFFSET 0.00000 -15.72190 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightToeBase
{
OFFSET 0.00000 -1.61281 6.01911
CHANNELS 3 Xrotation Yrotation Zrotation
End Site
{
OFFSET 0.00000 0.00000 2.95275
}
}
}
}
}
JOINT Spine
{
OFFSET 0.00000 0.03937 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT Spine1
{
OFFSET 0.00000 6.63648 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT Neck
{
OFFSET 0.00000 10.89313 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT Head
{
OFFSET 0.00000 5.84841 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
End Site
{
OFFSET 0.00000 4.52755 0.00000
}
}
}
JOINT LeftShoulder
{
OFFSET 0.00000 10.89313 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftArm
{
OFFSET 7.21266 -0.00003 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftForeArm
{
OFFSET 9.64829 -0.00004 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftHand
{
OFFSET 9.06793 -0.00003 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT LeftHandThumb
{
OFFSET 0.00000 0.00000 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
End Site
{
OFFSET 0.00000 0.00000 3.93700
}
}
JOINT L_Wrist_End
{
OFFSET 3.93700 -0.00001 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
}
}
}
}
}
JOINT RightShoulder
{
OFFSET 0.00000 10.89313 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightArm
{
OFFSET -7.21266 -0.00003 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightForeArm
{
OFFSET -9.64829 -0.00004 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightHand
{
OFFSET -9.06793 -0.00003 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
JOINT RightHandThumb
{
OFFSET 0.00000 0.00000 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
End Site
{
OFFSET 0.00000 0.00000 3.93700
}
}
JOINT R_Wrist_End
{
OFFSET -5.39369 -0.00002 0.00000
CHANNELS 3 Xrotation Yrotation Zrotation
}
}
}
}
}
}
}
}
MOTION
Frames: 6
Frame Time: 0.5
0 50 0 0 0 0 20 0 0 90 0 0 0 0 0 0 0 0 90 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 50 0 0 0 0 20 0 0 45 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 50 0 0 0 0 20 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 50 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 50 0 20 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 50 0 20 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
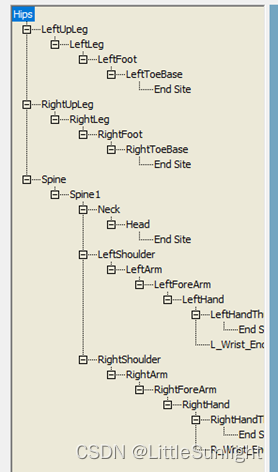
对比着bvh文件中骨架的定义和bvhaker文件的截图,可以看到骨架信息是层次化结构的。
Bvh文件头部包含一个HIERARCHY关键词,接下来一行是ROOT关键词来定义根节点,通常都是胯部的节点。一个ROOT节点可以理解成一个人。然后就在ROOT节点内定义身体的各个部位JOINT,以层层的结构定义。
OFFSET: 节点中的OFFSET是该节点相对父节点的偏移量,以此来保证骨架的长度,ROOT节点的偏移定义为0 0 0。
CHANNELS: 节点中的CHANNELS为该节点的自由度,除了ROOT节点有Xpos、Ypos、Zpos三个位移自由度和Xtrot、Yrot、Zrot三个旋转自由度,其他节点只有Xtrot、Yrot、Zrot三个旋转自由度(pos=position rot=rotation End Site节点什么都没,因为他是结尾节点,所以没有什么信息),这意味着骨架的移动主要是靠ROOT节点的移动来实现,而骨架在某位置的姿势是靠所有节点通过旋转来形成的,这样就保证了在移动过程中骨架长度的不变,不会出现畸形。
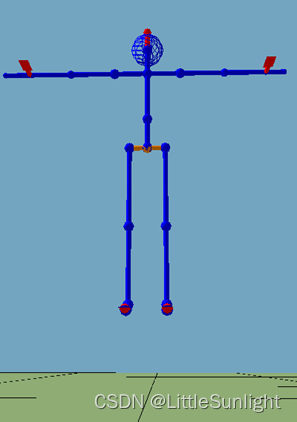
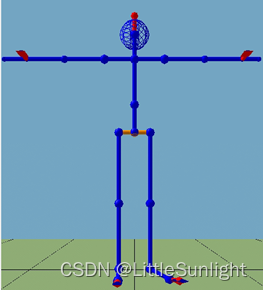
初始的骨架信息定义了骨架的初始姿势,通常都是一个T型姿势,我们把运动信息都设置为0,然后bvhaker软件截图如图:
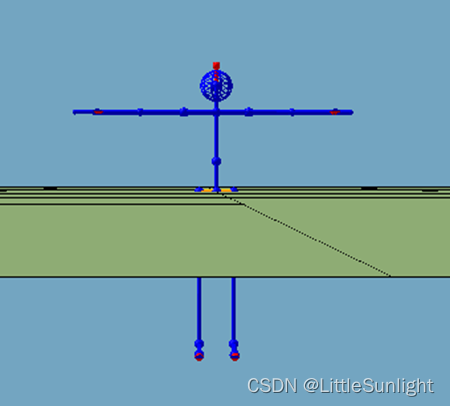
因为是以胯部为ROOT节点,所以世界坐标系也就在ROOT节点处。
2.运动描述信息: 运动信息是描述骨架运动过程的信息,正是有了这些信息,骨架才能移动起来。
运动描述信息以MOTION开头,Frames关键词是表示总共有多少帧,即你的运动描述数据有多少行(一行代表一帧数据),Frame Time关键词是表示一帧持续的时间是多少通常是 视频时长/总帧数,如图:

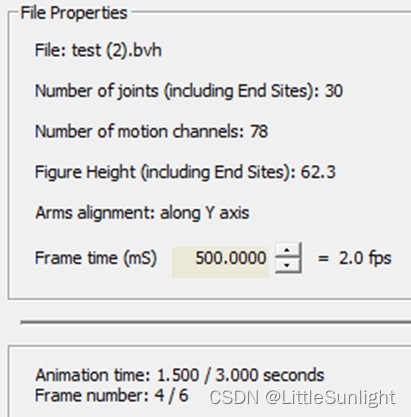
往下就是运动描述数据,每一行数据的列数是前面骨架信息中CHANNELS包含的XYZ个数,从上图可以看到该文件中是78。
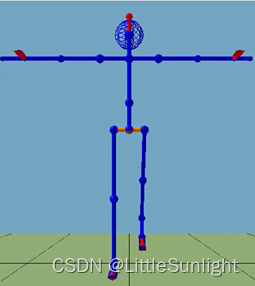
每一行数据有没有什么关系呢?我们往下看,每一行的数据都是相对于初始姿态的位置移动信息,例如我们在第一行和第二行让骨架上移50,如图分别是第一帧和第二帧的截图:
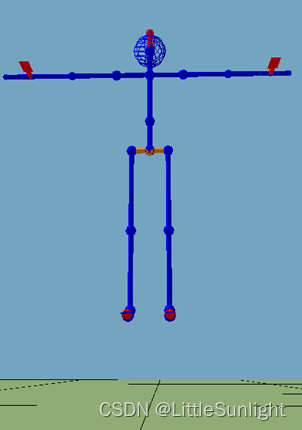
为了好比较,我把观看视角拉了一下,可以发现在这两帧里面,骨架离地面的距离是一样的,所以,运动描述数据中的每一帧都是相对其初始位置的,而不是累加前面的帧的变化。并且,我们只让ROOT节点向上移动50,但是整个骨架都移动了,说明,节点的变化会带动子节点一起变化。
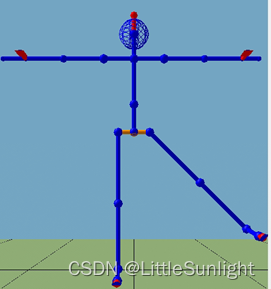
接下来我们看看旋转自由度是如何控制骨架变化的。我们先让左大腿绕x旋转45度:

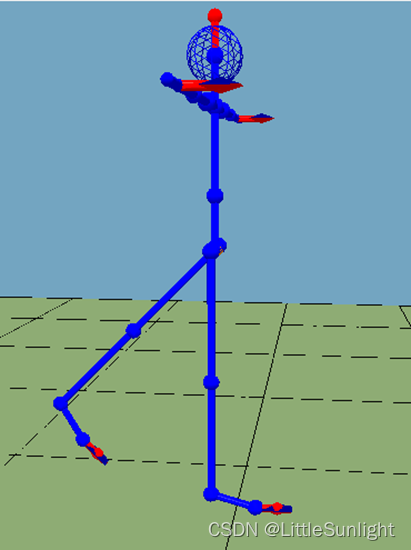
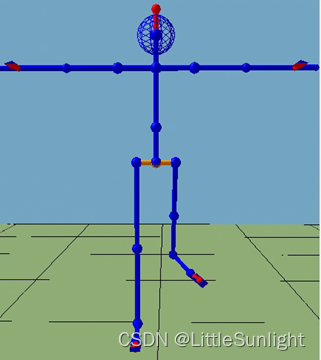
我们发现其子节点也都跟着移动了,所以某节点旋转时,也会带着其子节点一起旋转。这时候我们再让小腿绕x旋转45度:

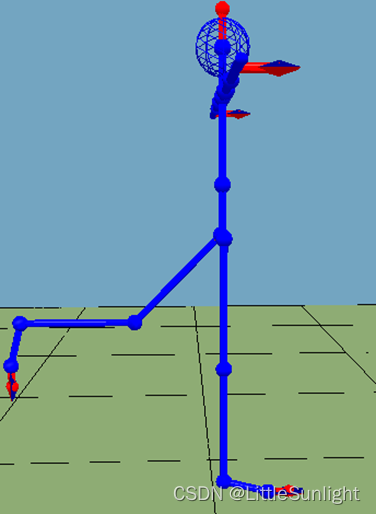
可以看到小腿旋转45度是相对局部坐标系,而不是世界坐标系。节点在旋转时,它的局部坐标系也跟着旋转。一个节点在旋转之前,其局部坐标与父节点的局部坐标平行。
说的更精确点就是,子节点先继承父节点的局部坐标系,子节点在旋转时,根据自己这个继承的局部坐标系的xyz轴进行旋转,旋转的同时,这个继承的局部坐标系也会变化,比如先按x轴旋转,那么局部坐标系也会变化,然后绕y轴旋转时,按照这个变化后的局部坐标系。
我们考虑一下对同一个关节的xyz轴都进行旋转,结果会是怎么样,我们先看看大腿分别绕x、y、z轴旋转45度的情况:
再看看分别绕x、y转45度:
当绕x转45度时,此时的大腿的局坐标时这样的(换个角度看的更清晰):
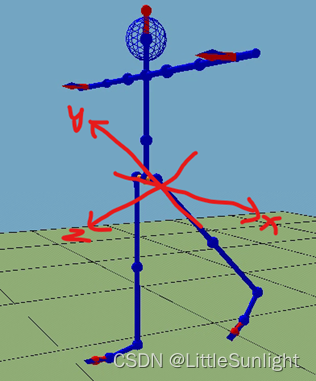
此时再绕y或者z旋转时,是按照这个坐标轴的,我们可以先看一下绕y旋转45度:
可以看到大腿并没有往外扩,如果是按照父节点的坐标系的话,此时父节点的坐标系和世界坐标系一样,按理说大腿应该往外扩的,但是并没有,它是按照自己的坐标系来进行旋转的。
同理先绕x旋转45,再绕z旋转45,效果一样,同理先绕x,再绕y,再绕z分别旋转45也是一样的。
就是这样的一行行数据,刻画了骨架的每一帧的形状,构成了一帧帧图像,然后形成了视频。
由于旋转都是相对于父节点的,所以我们可以先让子节点旋转,再移动父节点(带动着子节点),这样更好理解。















 2341
2341











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









