






1 简介
Hi,大家好,今天向大家介绍一个学长做的单片机项目
基于stm32的示波器设计
大家可用于 课程设计 或 毕业设计
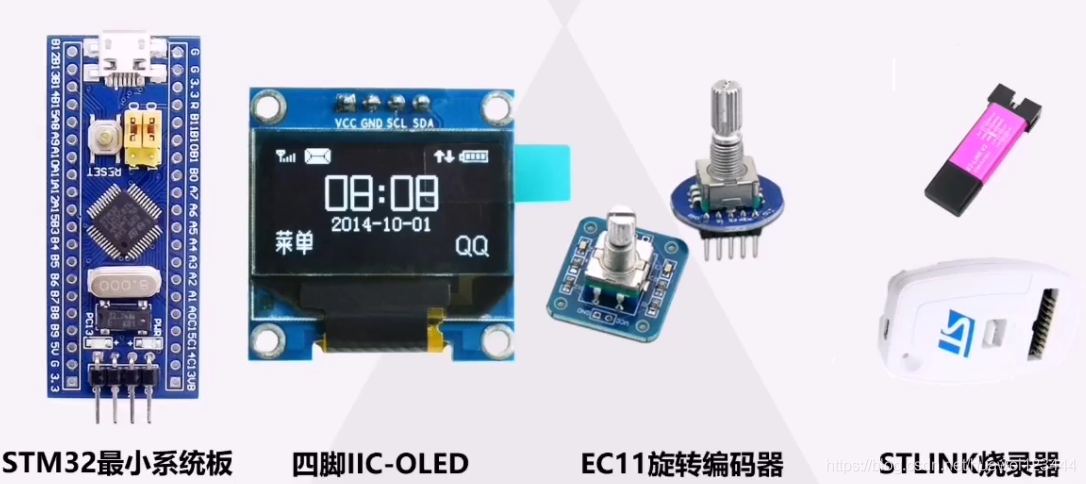
2 主要器件

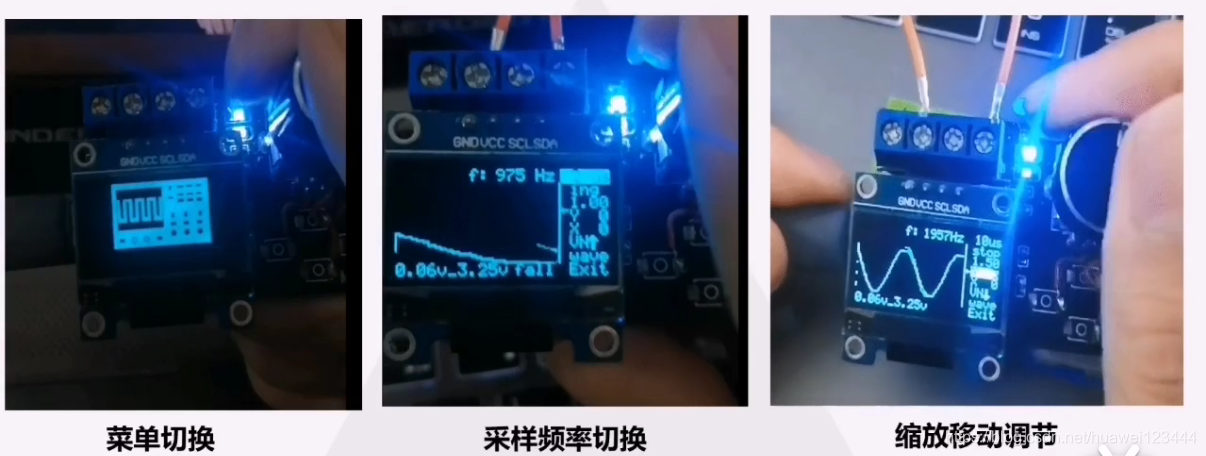
3 实现效果

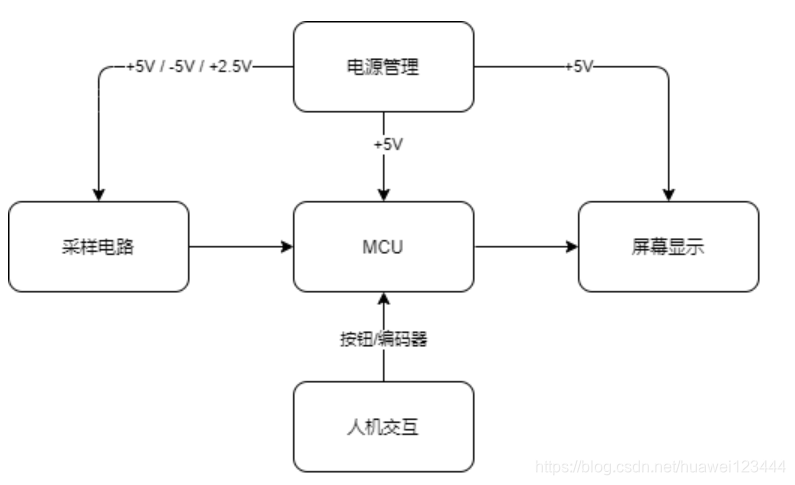
4 设计原理
学长设计的示波器采用了一套成本低廉但高效的硬件,配合层次化的软件框架,实现对常规低频信号波形的采集、分析、显示。
硬件部分的主要工作有:电源管理(5V、2.5V、-5V);对信号的衰减、限幅、偏置。最后将处理好的电压信号送入MCU的ADC外设,进行数据采集。由于ADC外设只能采集正电压,因此我们通过增加偏置电压的方式,将负电压抬高来采集。
软件部分的主要工作有:底层驱动SDK框架、ADC滤波算法、波形数据处理、人机交互界面。SDK提供基本的模块和外设驱动支持,滤波算法去除噪声和毛刺,波形处理计算电压值和频率,并为波形显示做准备;人机交互界面提供屏幕显示(OLED屏)和操作方式(旋钮和按键)。
5 部分实现代码
部分核心代码:
/**********************************************************
简介:ADC1-CH6初始化函数
***********************************************************/
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1, ENABLE ); //使能ADC1通道时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M
//PA6 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1工作在独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在非连续转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T2_CC2; //转换由定时器2的通道2触发(只有在上升沿时可以触发)
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_DMACmd(ADC1, ENABLE); //ADC的DMA功能使能
ADC_ResetCalibration(ADC1); //使能复位校准
ADC_RegularChannelConfig(ADC1, ADC_Channel_6, 1, ADC_SampleTime_1Cycles5 );//ADC1通道6,采样时间为239.5周期
ADC_ResetCalibration(ADC1);//复位较准寄存器
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
}
/******************************************************************
函数名称:TIM2_PWM_Init(u16 arr,u16 psc)
函数功能:定时器3,PWM输出模式初始化函数
参数说明:arr:重装载值
psc:预分频值
备 注:通过TIM2-CH2的PWM输出触发ADC采样
*******************************************************************/
void TIM2_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//设置该引脚为复用输出功能,输出TIM2 CH2的PWM脉冲波形 GPIOA.1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM2 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=1000; //发生反转时的计数器数值,用于改变占空比
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM2
TIM_CtrlPWMOutputs(TIM2, ENABLE);//使能PWM输出
TIM_Cmd(TIM2, ENABLE); //使能TIM2
}
/******************************************************************
函数名称:MYDMA1_Config()
函数功能:DMA1初始化配置
参数说明:DMA_CHx:DMA通道选择
cpar:DMA外设ADC基地址
cmar:DMA内存基地址
cndtrDMA通道的DMA缓存的大小
备 注:
*******************************************************************/
void MYDMA1_Config(DMA_Channel_TypeDef* DMA_CHx,u32 cpar,u32 cmar,u16 cndtr)
{
DMA_InitTypeDef DMA_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //使能DMA传输
DMA_DeInit(DMA_CHx); //将DMA的通道1寄存器重设为缺省值
DMA_InitStructure.DMA_PeripheralBaseAddr = cpar; //DMA外设ADC基地址
DMA_InitStructure.DMA_MemoryBaseAddr = cmar; //DMA内存基地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //数据传输方向,从外设读取发送到内存//
DMA_InitStructure.DMA_BufferSize = cndtr; //DMA通道的DMA缓存的大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //数据宽度为16位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //数据宽度为16位
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //工作在循环模式
DMA_InitStructure.DMA_Priority = DMA_Priority_High; //DMA通道 x拥有高优先级
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x没有设置为内存到内存传输
DMA_Init(DMA_CHx, &DMA_InitStructure); //ADC1匹配DMA通道1
DMA_ITConfig(DMA1_Channel1,DMA1_IT_TC1,ENABLE); //使能DMA传输中断
//配置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_Cmd(DMA1_Channel1,ENABLE);//使能DMA通道
}
#define NPT 1024//一次完整采集的采样点数
/******************************************************************
函数名称:GetPowerMag()
函数功能:计算各次谐波幅值
参数说明:
备 注:先将lBufOutArray分解成实部(X)和虚部(Y),然后计算幅值(sqrt(X*X+Y*Y)
*******************************************************************/
void GetPowerMag(void)
{
float X,Y,Mag,magmax;//实部,虚部,各频率幅值,最大幅值
u16 i;
//调用自cr4_fft_1024_stm32
cr4_fft_1024_stm32(fftout, fftin, NPT);
//fftin为傅里叶输入序列数组,ffout为傅里叶输出序列数组
for(i=1; i<NPT/2; i++)
{
X = (fftout[i] << 16) >> 16;
Y = (fftout[i] >> 16);
Mag = sqrt(X * X + Y * Y);
FFT_Mag[i]=Mag;//存入缓存,用于输出查验
//获取最大频率分量及其幅值
if(Mag > magmax)
{
magmax = Mag;
temp = i;
}
}
F=(u16)(temp*(fre*1.0/NPT));//源代码中此公式有误,将此复制进去
LCD_ShowNum(280,180,F,5,16);
}
u16 magout[NPT];
/******************************************************************
函数名称:InitBufInArray()
函数功能:正弦波值初始化,将正弦波各点的值存入magout[]数组中
参数说明:
备 注:
*******************************************************************/
void InitBufInArray(void)
{
u16 i;
float fx;
for(i=0; i<NPT; i++)
{
fx = sin((PI2*i)/NPT);
magout[i] = (u16)(2048+2048*fx);
}
}
/******************************************************************
函数名称:sinout()
函数功能:正弦波输出
参数说明:
备 注:将此函数置于定时器中断中,可模拟输出正弦波
*******************************************************************/
void sinout(void)
{
static u16 i=0;
DAC_SetChannel1Data(DAC_Align_12b_R,magout[i]);
i++;
if(i>=NPT)
i=0;
}
void Dac2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
DAC_InitTypeDef DAC_InitType;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE ); //使能PORTA通道时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE ); //使能DAC通道时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
DAC_InitType.DAC_Trigger=DAC_Trigger_T4_TRGO; //定时器4触发
DAC_InitType.DAC_WaveGeneration=DAC_WaveGeneration_Noise;//产生噪声
//DAC_WaveGeneration_Triangle产生三角波
DAC_InitType.DAC_LFSRUnmask_TriangleAmplitude=DAC_TriangleAmplitude_4095;//幅值设置为最大,即3.3V
DAC_InitType.DAC_OutputBuffer=DAC_OutputBuffer_Disable ; //DAC1输出缓存关闭 BOFF1=1
DAC_Init(DAC_Channel_2,&DAC_InitType); //初始化DAC通道2
DAC_Cmd(DAC_Channel_2, ENABLE); //使能DAC-CH2
DAC_SetChannel1Data(DAC_Align_12b_R, 0); //12位右对齐数据格式设置DAC值
}














 1184
1184











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









