






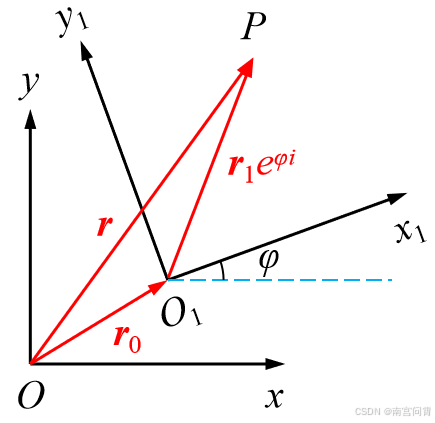
设运动参考系的原点相对于静止参考系的原点
的矢径为
,质点
在运动参考系中的矢径为
,矢量用
的复数形式表示。设运动参考系相对于其原点
沿逆时针方向转过的角度为
,则质点
在静止参考系中的矢径
。对等式两端关于时间
求导
令
则
继续对等式两端关于时间求导
令
则
例如,当运动参考系的原点静止,运动参考系以角速度
绕
作匀速转动,质点
在运动参考系中以速度
沿径向作匀速直线运动时(即等速螺线,又称阿基米德螺线),代入
可得
其中是由于运动参考系的旋转产生的旋转项,这意味着为了让质点
按照上述方式运动,必须对质点
施加力,施加的合力的大小为定值,方向需要随运动参考系的旋转一同变化,这个合力在运动参考系中对应的加速度的表达式即为
其中指向点的向心加速度为
另一个加速度分量为
其中表示逆时针旋转90°,而
,故
,即
为切向加速度,方向始终与矢径
垂直,大小为
,也称为科氏加速度。
现在再回到下式的讨论
将向平行于
和垂直于
的方向分解
其中,
。同理将
向平行于
和垂直于
的方向分解
其中,
。通过整理可得
其中第一个括号中的项为平行于的分量,第二个括号中的项为垂直于
的分量。可以看到,当
有垂直于
方向的分量
时,在沿
方向的向心加速度中,也会存在一个二倍项
。当然,应当注意的是,上文所提到的向心加速度和切向加速度并非通常所说的含义,这里的“心”是运动参考系的原点
,并非质点轨迹的曲率中心(通常所说的向心加速度应当是指向曲率中心,或者说垂直于速度方向的)。
进而很自然地会产生这样一个问题:怎样的平面运动会使得其轨迹的曲率中心和运动参考系的原点重合?答案是显然的:任何平面运动只要以其轨迹的曲率中心作为运动参考系的原点都可以满足要求,因此如何求运动轨迹的曲率中心,就成为一个新的问题。当然这里并不是要讨论使用微积分的方法求解,而是从运动学的角度考虑:
首先考虑如何在静止坐标系中表示质点的运动轨迹,在平面直角坐标系中表达一条曲线的方法有很多,这里使用如下方法表达:
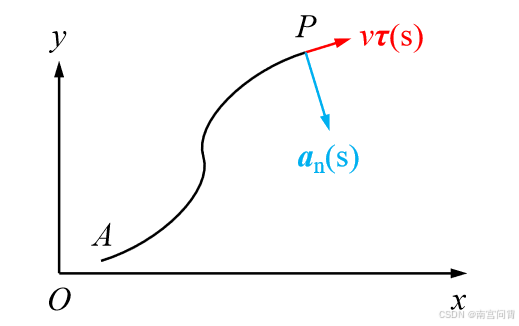
设质点的轨迹起点为,质点
运动的路程(曲线
的长度)为
,质点
的速度方向的单位向量(即曲线的单位切向量)为
注:。为了方便起见,令质点
的速度大小恒为
(从而质点没有切向加速度,向心加速度就等于加速度),则质点在
处的速度为
,加速度为
因此质点在处的向心加速度为
故
其中为曲率半径,
为曲率。为了验证,可以根据上式来导出高等数学中的曲率公式:
设曲线的方程为,起点
的横坐标为
,质点
的横坐标为
,则
其中
整理得
这与高等数学中的曲率公式相同。
最后请思考:在上文的例子中,若保持和
的条件不变,则怎样的
可以使运动参考系的原点
与质点轨迹的曲率中心始终重合。
要满足这个要求,需要从速度的方向和大小两方面来考虑。
① 速度方向需要满足,即运动参考系的原点
始终在曲率半径所在的直线上,其数学表达为
其中为关于时间
的标量函数。
② 速度大小需要满足,其中
为
在垂直于
方向的分量,即向心加速度。
其中前两项平行于,第三项垂直于
,故
,
,从而解得
当且仅当满足上式时,运动参考系的原点
与质点轨迹的曲率中心始终重合。事实上,此时的质点轨迹在静止参考系中是一条渐开线,运动参考系的原点
所经过的轨迹是这条渐开线的基圆,基圆的半径
。
对积分可得
,其中
为常数,因此
其中为常矢量。对
积分可得
,因此
令,即
的大小为
,方向与
垂直,则上式可写成
此式为渐开线的参数方程,参数的取值为非负数,基圆半径为
,基圆的圆心为
的终点。因此渐开线的曲率半径始终与基圆相切,切点即为曲率中心。日常生活中齿轮的齿形曲线大多选用渐开线的一个重要原因就是因为它的这一性质。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









