





Cog3DRangeImagePlaneEstimatorTool 工具超详细解释
Cog3DRangeImagePlaneEstimatorTool 是康耐视 VisionPro 中的 3D 深度图平面拟合工具,核心作用是从 3D 点云(或深度图像)中拟合出空间平面,输出平面的法向量、偏移、姿态角度及拟合精度等参数,解决 3D 场景中 “平面特征量化、工件姿态校准” 的难题,是工业 3D 视觉流程中 “平面基准构建、3D 检测 / 定位” 的核心预处理工具。
一、基本定位
Cog3DRangeImagePlaneEstimatorTool 是 VisionPro 中针对 3D 深度图 / 点云的专用平面拟合工具,核心解决两大痛点:
- 3D 点云(如线激光相机采集的工件深度数据)的平面特征无法直接量化,常规 2D 工具无法处理其空间维度信息;
- 3D 工件的姿态(如是否平放)、平面度(如板材凹陷)无法通过 2D 图像判断,需依托 3D 平面参数实现精准评估。
工具输出的平面参数中:
- 法向量(X/Y/Z):描述平面的空间朝向;
- 偏移:描述平面与坐标系原点的垂直距离;
- 倾斜 / 旋转角度:直观体现平面相对于参考坐标系的姿态;
- 残留 RMS:反映点云与拟合平面的贴合程度(拟合精度指标)。
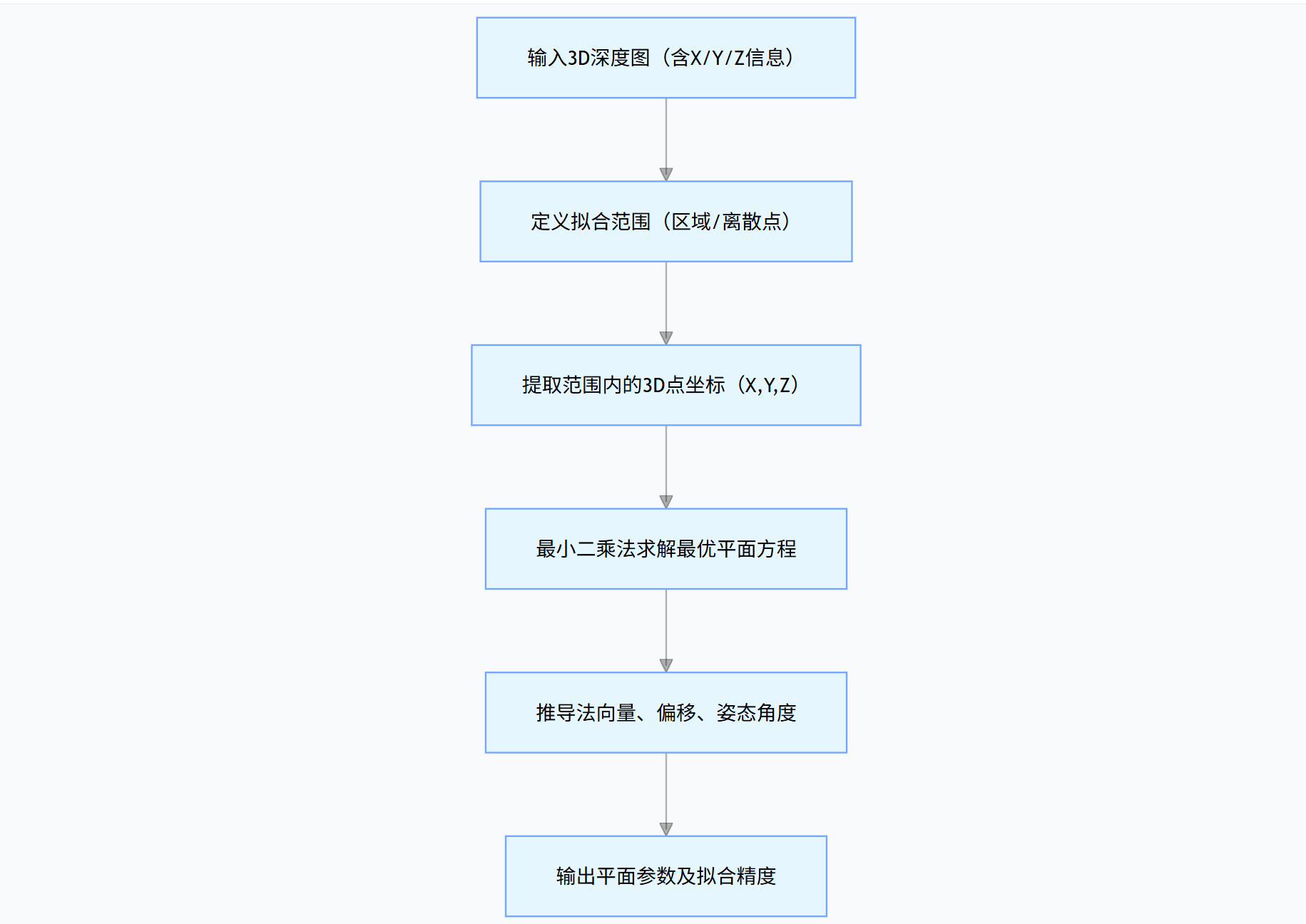
二、核心原理:3D 点云的最小二乘平面拟合
3D 空间中平面的数学表达为 Ax+By+Cz+D=0(A、B、C 为法向量分量,D 为偏移参数),工具依托最小二乘法实现平面拟合,核心流程:
(一)拟合范围的核心规则
工具支持两种拟合范围定义方式,适配不同 3D 目标场景:
-
面积拟合(区域模式)
- 定义:选取指定区域内的所有 3D 点参与拟合,适配大面积平面目标(如工件整面);
- 核心逻辑:通过 “区域形状(矩形 / 多边形 / 全图像)+ 区域模式(掩膜筛选)” 限定有效点云,排除非平面干扰区域(如工件边缘凸起);
- 示例(对应图 1):区域模式选 “像素配对限定框调整掩膜”,区域形状选 “< 无 - 使用整个图像 >”,实现全深度图的平面拟合。
-
点拟合(离散点模式)
- 定义:选取手动指定的离散 3D 点参与拟合,适配小范围特征平面(如工件角点);
- 核心逻辑:输入离散点的 X/Y 二维坐标(示例图 2 中输入 4 个点:(0,0)、(0,50)、(50,0)、(50,50)),工具通过 “Z 查询方法”(如 “领域” 模式,取目标点周围 5×5 像素的 Z 值平均)获取对应深度值,减少深度噪声影响。
(二)平面参数的推导逻辑
基于拟合得到的平面方程 Ax+By+Cz+D=0,工具进一步推导实用参数:
- 法向量:(A,B,C)(归一化后反映平面的空间朝向);
- 偏移:∣D∣/A2+B2+C2(平面到坐标系原点的垂直距离);
- 倾斜 / 旋转角度:将法向量转换为欧拉角(单位:度,图 4 中初始默认值为 0);
- 残留 RMS:所有点到平面的距离均方根(值越小,拟合精度越高)。
三、核心参数解析(实战配置维度)
Cog3DRangeImagePlaneEstimatorTool 的参数界面核心分为 “拟合配置”“范围定义”“可视化调试”“结果输出” 四大模块,结合图片示例补充关键参数细节:
| 参数模块 | 具体参数 | 技术原理 | 实战配置技巧(结合图片示例) |
|---|---|---|---|
| 拟合配置 | 拟合方法(面积 / 点) | 选择参与拟合的 3D 点源类型 | - 大面积平面:选 “面积”(图 1);- 小特征平面:选 “点”(图 2) |
| 范围定义 | 区域模式(仅 “面积” 生效) | 限定区域内的有效点云(如掩膜筛选) | 排除干扰:选 “像素配对限定框调整掩膜”(图 1) |
| 范围定义 | 区域形状(仅 “面积” 生效) | 定义拟合区域的几何形态 | 全图拟合:选 “<无 - 使用整个图像>”(图 1) |
| 范围定义 | 离散点 X/Y(仅 “点” 生效) | 手动指定参与拟合的离散点二维坐标 | 拟合工件 4 角:输入(0,0)、(0,50)、(50,0)、(50,50)(图 2) |
| 范围定义 | Z 查询方法(仅 “点” 生效) | 获取离散点深度值的方式 | 减少噪声:选 “领域”,设置领域尺寸 X/Y=5(图 2) |
| 范围定义 | 平面方向 | 定义法向量朝向,匹配 3D 相机坐标系 | 适配相机:选 “正向像素空间 Z”(图 1、图 2) |
| 可视化调试 | 图形选项卡参数 | 直观验证拟合范围的准确性 | 调试时勾选:“显示输入区域”“显示输入图像掩膜”“显示输入点”(图 3);选 “显示输入图像(不带副本)” |
| 结果输出配置 | 结果选项卡参数 | 展示平面拟合的最终参数 | 关注核心指标:残留 RMS、法向量(正常 X/Y/Z)、倾斜 / 旋转角度(图 4) |
四、典型应用场景
-
3D 相机外参校准
- 配置:拟合方法 =“面积”,区域形状 =“< 无 - 使用整个图像 >”,区域模式 =“像素配对限定框调整掩膜”,平面方向 =“正向像素空间 Z”;
- 输出:法向量、偏移参数;
- 后续工具:结合 Cog3DCalibrateTool 完成相机外参校准。
-
工件平放姿态检测
- 配置:拟合方法 =“点”,输入工件 4 角离散点(0,0)、(0,50)、(50,0)、(50,50),Z 查询方法 =“领域”(5×5);
- 输出:倾斜 / 旋转角度(图 4 中初始为 0,运行后输出实际值);
- 判定逻辑:倾斜角度 > 2° → 工件姿态异常;
- 后续工具:结果输入 CogDecisionTool,触发产线报警。
-
板材平面度评估
- 配置:拟合方法 =“面积”,区域模式 =“像素配对限定框调整掩膜”(排除边缘);
- 输出:残留 RMS;
- 判定逻辑:残留 RMS>0.5mm → 板材平面度不达标;
- 后续工具:结果录入数据库,记录产品质量数据。
五、实战配置示例(工件角点平面拟合)
以 “拟合 50mm×50mm 工件 4 角的 3D 平面” 为例,完整配置步骤(结合图片参数):
- 输入 3D 深度图:通过 Cog3DAcquireTool 采集工件的深度数据;
- 选择拟合方法:在 “设置” 选项卡中选 “点”(图 2);
- 输入离散点坐标:在 “点(二维位置)” 表格中输入 4 个角点:(0,0)、(0,50)、(50,0)、(50,50);
- 配置 Z 查询方法:选 “领域”,设置领域尺寸 X/Y=5;
- 设置平面方向:选 “正向像素空间 Z”;
- 可视化验证:切换到 “图形” 选项卡,勾选 “显示输入点”,确认点标记与工件角点对齐(图 3);
- 运行工具:切换到 “结果” 选项卡,获取法向量、倾斜 / 旋转角度等参数(图 4);
- 姿态判定:若倾斜角度≤1°,判定工件平面姿态合格。
六、与其他工具的协同
Cog3DRangeImagePlaneEstimatorTool 的输出需配合以下工具完成 3D 视觉流程:
- Cog3DAcquireTool:提供 3D 深度图输入;
- CogPMAlign3DTool:先定位 3D 工件位置,再传递区域 / 点参数(适配工件偏移场景);
- CogDecisionTool:基于 “倾斜角度”“残留 RMS” 输出判定结果;
- Cog3DTransformTool:基于法向量参数调整机械臂抓取姿态。
七、总结
Cog3DRangeImagePlaneEstimatorTool 是 VisionPro 中 3D 平面拟合的核心工具,核心价值体现在:
- 底层逻辑:依托最小二乘法实现 3D 点云到平面参数的量化,填补 2D 工具无法处理空间维度的空白;
- 配置灵活:支持 “区域 / 离散点” 两种拟合方式,结合掩膜、领域平均等功能适配不同 3D 场景;
- 可视化强:通过 “图形” 选项卡直观验证拟合范围,降低调试难度;
- 结果实用:输出的法向量、姿态角度、精度指标直接服务于 3D 检测、定位、测量场景。
在工业 3D 视觉检测中,该工具的配置核心是 “匹配目标特性选择拟合方式、通过掩膜 / 领域功能排除干扰、结合可视化调试验证参数”,结合后续工具可实现 3D 工件的姿态校准、平面度评估、抓取定位等功能,是 3C 电子、汽车零部件等行业 3D 视觉方案的基础组件。

















 1244
1244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









