







文章目录
图的概念
图的定义
二元组(V(G),E(G))称为图。
其中, V(G)是非空集合,称为结点集
E(G)是V(G)诸结点之间边的集合
常用G=(V,E)表示图
即结点数|V|=n, 边数|E|=m
边
e
k
=
(
v
i
,
v
j
)
(
称
v
i
和
v
j
是相邻结点
,
或者
e
k
分别与
v
i
,
v
j
相关联
)
e_k=(v_i, v_j) (称v_i和v_j是相邻结点, 或者e_k分别与v_i,v_j相关联)
ek=(vi,vj)(称vi和vj是相邻结点,或者ek分别与vi,vj相关联)
有向图:
v
i
是
e
k
的始点,
v
j
是
e
k
的终点
v_i是e_k的始点,v_j是e_k的终点
vi是ek的始点,vj是ek的终点
无向图:
v
i
,
v
j
是
e
k
的端点
v_i,v_j是e_k的端点
vi,vj是ek的端点
- 自环(圈) 只有一个结点相关联的边
- 重边、多重图 同一对结点之间存在多条边
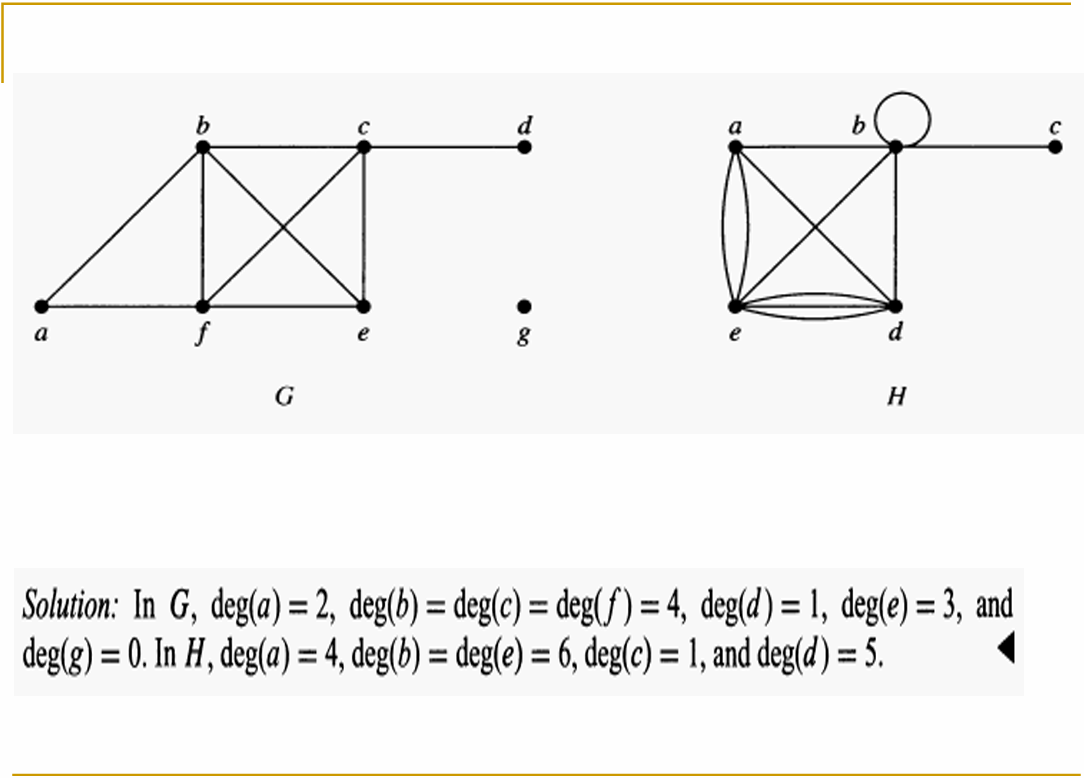
度
G=(V,E)的某结点v所关联的边数称为该结点的度,用 d(v)表示。如果v带有自环,则自环对d(v)的贡献为2
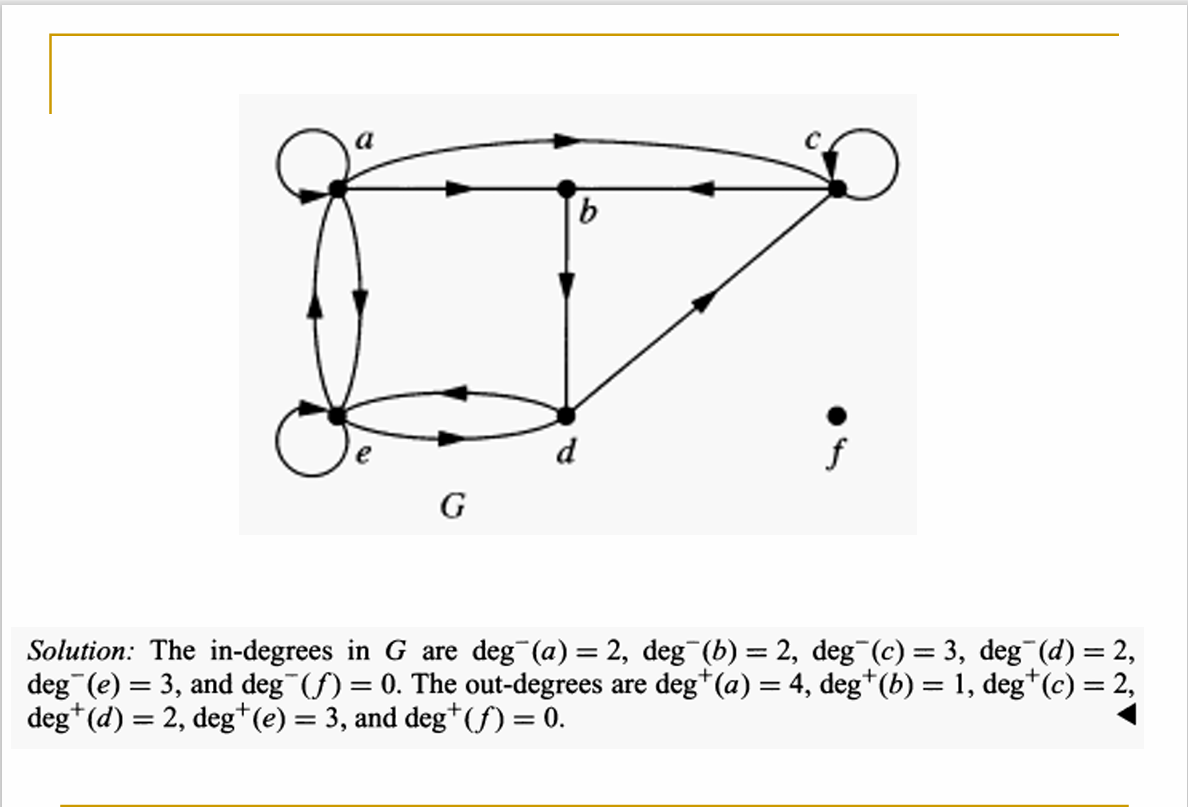
有向图中:
出度(正度) d + ( v ) d^+(v) d+(v): 以结点v为始点的边的数目
入度(负度) d − ( v ) d^-(v) d−(v): 以结点v为终点的边的数目
d ( v ) = d + ( v ) + d − ( v ) d(v) = d^+(v)+d^-(v) d(v)=d+(v)+d−(v)
例子:
特殊的图
- 简单图: 任意两结点间最多只有一条边,且不存在自环的无向图
- 空图: 没有任何边的简单图(V, Ø), 用
N
n
N_n
Nn表示
若此时恰有|V|=1, 称为平凡图 - 完全图: 任何两个结点间都有边的简单图, 用
K
n
K_n
Kn表 示
K n K_n Kn中每个节点的度都是n-1
图的性质
-
Handshaking Theorem
设G=(V, E)有n个结点,m条边,则 ∑ v ∈ V ( G ) d ( v ) = 2 m \sum_{v\in V(G)} d(v)=2m ∑v∈V(G)d(v)=2m -
G中度为奇数的结点必为偶数个.
-
有向图G中正度之和等于负度之和.
-
Kn的边数是n(n-1)/2.
-
非空简单图G中一定存在度相同的结点.
鸽巢原理
度d(v)的取值范围是 1~(n-1)
权
每条边赋以一个实数
w
k
w_k
wk作为权
都是正实数:正权图
子图
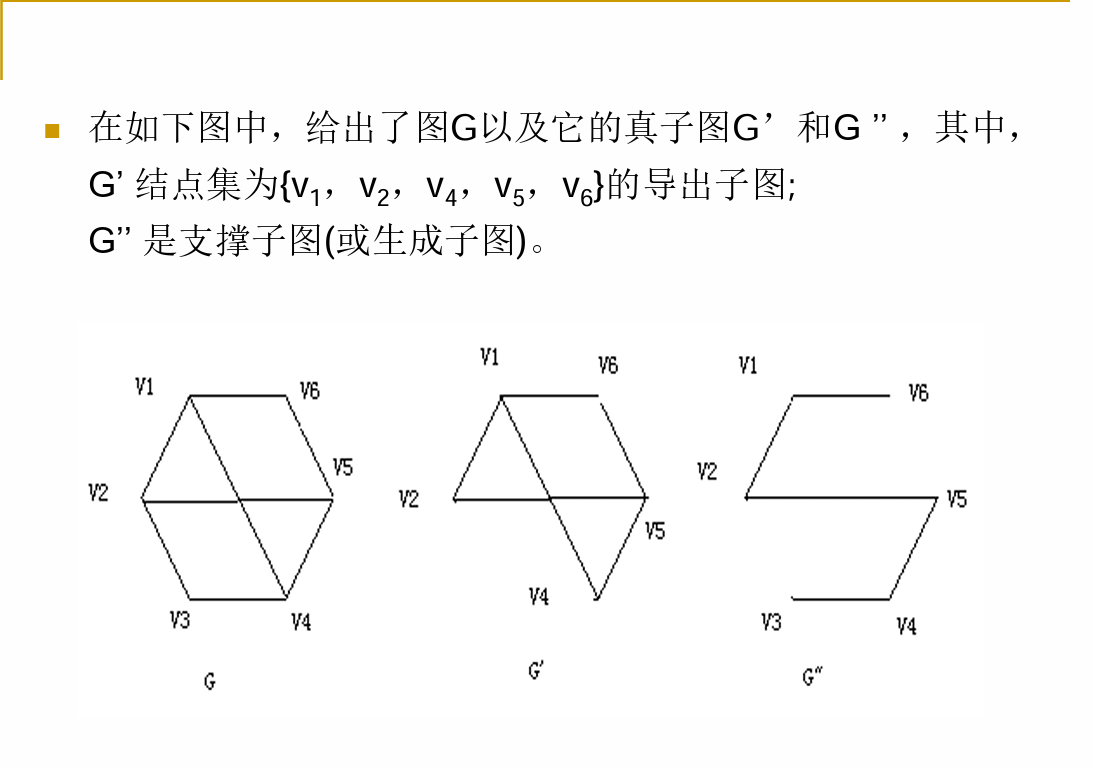
- 给定G=(V, E), 如果存在另一个G’=(V’, E’), 满足V’ ∈ \in ∈V, E’ ∈ \in ∈ E, 则称G’是G的一个子图
- 特别地,如果V’=V, 就称G’是G的支撑子图或者生成子图(spanning subgraph)
- 如果V’ ∈ \in ∈V, 且E’包含了G在结点子集V’之间的所有边, 则称G’是G的导出子图(induced subgraph)
- G自身既是支撑子图,又是导出子图;
- 空图是G的支撑子图;
- G自身和空图称为平凡子图
图的运算
给定两个图G1=(V1,E1),G2=(V2,E2). 令
-
G1 ∪ \cup ∪G2=(V,E),其中V=V1 ∪ \cup ∪V2,E=E1 ∪ \cup ∪E2;
-
G1 ∩ \cap ∩G2=(V,E),其中V=V1 ∩ \cap ∩V2,E=E1 ∩ \cap ∩E2;
-
G1 ⊕ \oplus ⊕G2=(V,E),其中V=V1 ∪ \cup ∪ V2,E=E1 ⊕ \oplus ⊕E2;
注意这里节点是并
分别称为G1和G2的并,交和对称差 -
G-H
- 表示在G中删去一个子图H,即删掉H中的各条边(支撑子图)
- 特别地,对于简单图G,称Kn-G为G的补图
-
G -v 表示从G中删去结点v及其关联的边(导出子图)
-
G-e 表示从G中删去边e(生成子图)
-
G + e i j 表示在 G 中增加某条边 e k = ( v i , v j ) G+e_ij 表示在G中增加某条边e_k=(v_i, v_j) G+eij表示在G中增加某条边ek=(vi,vj)
邻点集
-
无向图的邻点集 Γ(v)={u|(v, u) ∈ \in ∈E}
-
设v是有向图G的一个结点,则 Γ + Γ^+ Γ+(v)={u|(v, u) ∈ \in ∈E}
称为v的直接后继集或者外邻集; -
相应地 Γ − Γ^- Γ−(v)={u|(u, v) ∈ \in ∈E} 称为v的直接前趋集或者内邻集
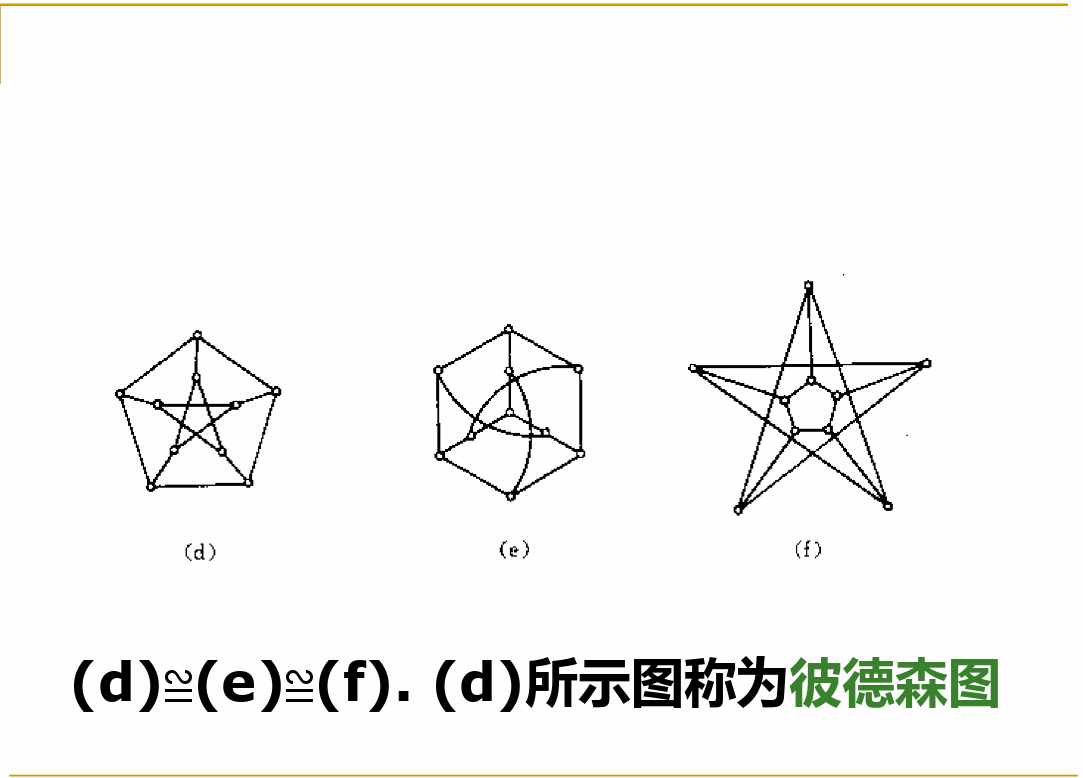
图的同构
定义
两个图G1=(V1, E1), G2=(V2, E2),如果V1和V2之间存在双射f, 而且(u, v)
∈
\in
∈E1, 当且仅当(f(u), f(v))
∈
\in
∈E2时, 称G1和G2同构
记作G1≅G2
必要条件(用来判断不是)
- |V(G1)|=|V(G2)|, |E(G1)|=|E(G2)|
- G1和G2结点度的非增序列相同
- 存在同构的导出子图(用来判断不同构)
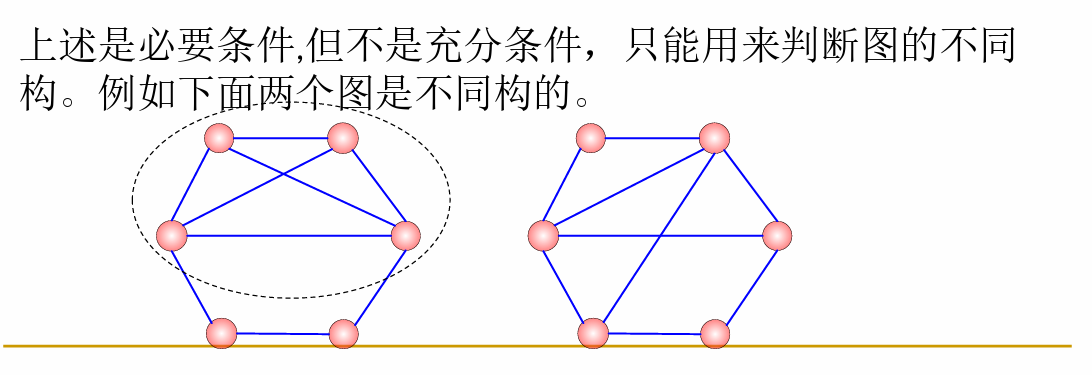
右图中不存在与左图中圈住部分同构的子图
图的代数表示
邻接矩阵(Adjacency Matrix)
- A[i,j]=1 , 如果i至j有 一条无向边;
- 可以表示自环
- 无法表示重边
- 有向图:
- v i v_i vi出度: i行之和;
- v j v_j vj入度: j列之和
- 无向图:
- 对称矩阵
- v i v_i vi结点的度: i行或i列之和
权矩阵
关联矩阵(Incidence Matrix)
- 有向图:
- B[i,j]=1, 如果 v i v_i vi是边ej=( v i , v k v_i,v_k vi,vk)的始点
- B[i,j]=-1, 如果 v i v_i vi是边ej= ( v k , v i (v_k,v_i (vk,vi)的终点
- 无向图: 没有-1, 1(如果是端点)
- 可以表示重边
- 无法表示自环
邻接表
- 可以表示重边和自环
- 与矩阵相比,更节约空间
图的应用
路线数量
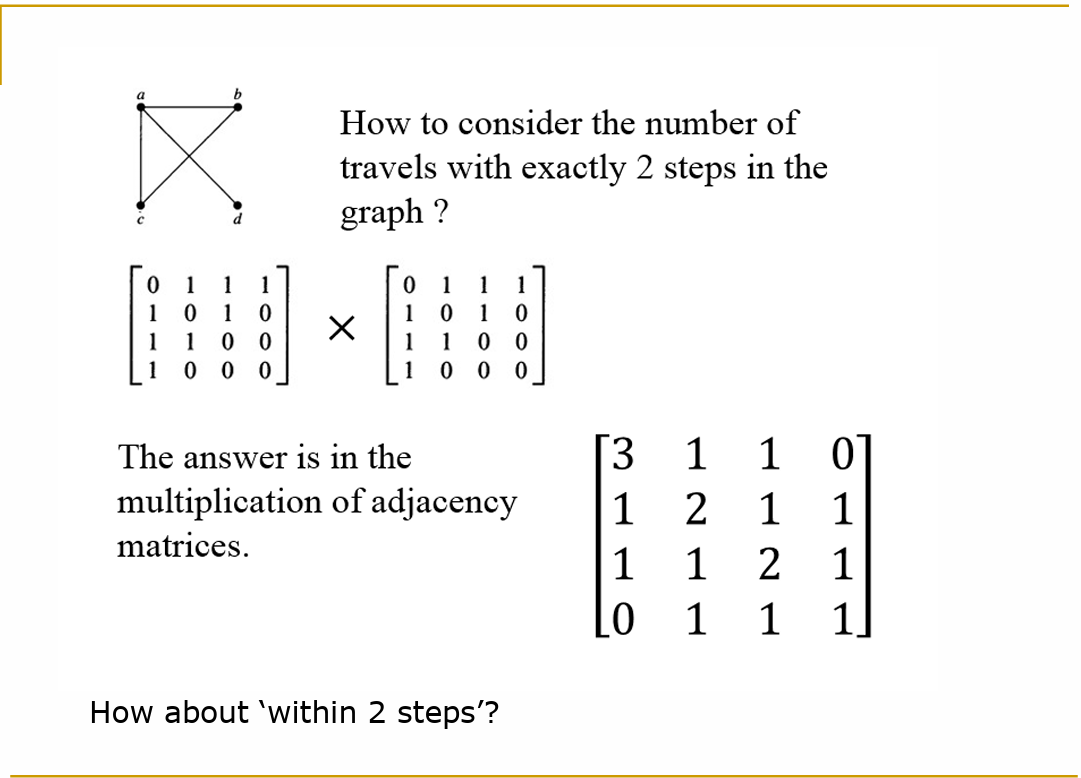
求任意两个节点之间刚好能两步到达的路线数量?
把2个邻接矩阵相乘,得到矩阵的第i行j列的数字就是从节点i到j的路线数量.
状态转移图
状态看作点,状态间的转化看作边
Q: 三个量杯容量分别是8升,5升,3升,现8升的量杯装满了水,问怎样才能把水分成2个4升的。
初始状态(8,0,0),终止状态(4,4,0)
A: (8,0,0)→(5,0,3)→(5,3,0)→(2,3,3) →(2,5,1)→(7,0,1)→(7,1,0)→(4,1,3)→(4,4,0)
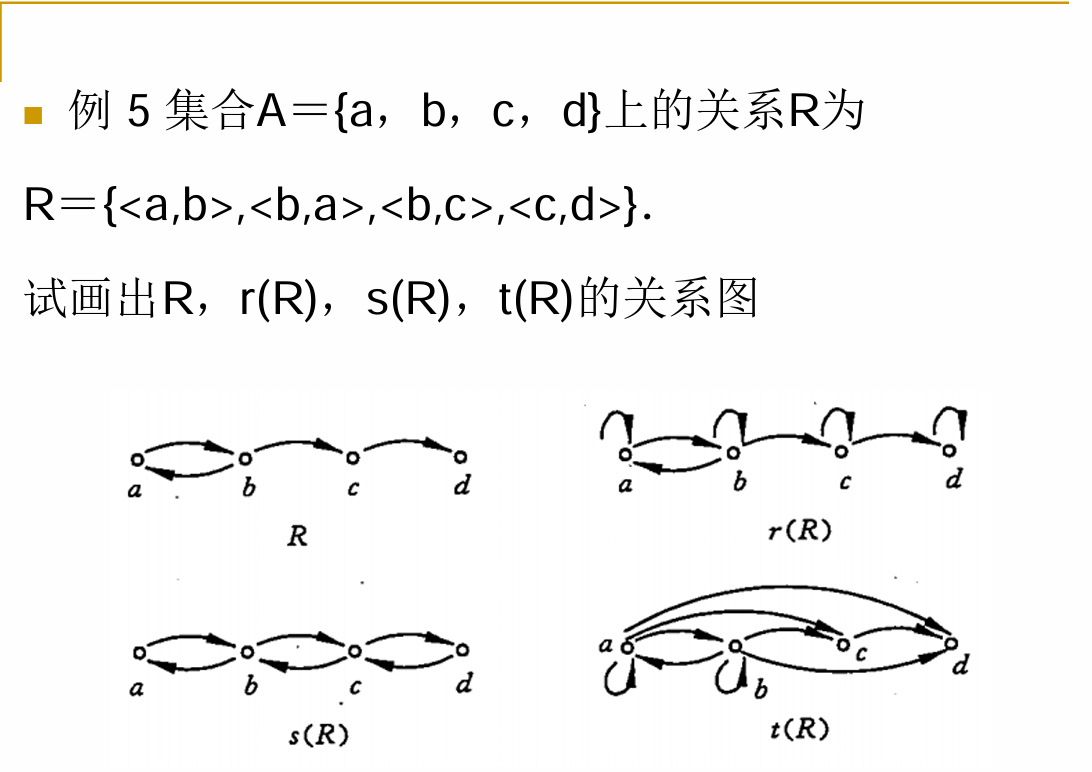
关系图
从图的角度理解关系
定义:设集合X={x1,x2,…,xm},Y={y1, y2,… ,yn} .若R是X到Y的一个关系,则R的关系图是一 个有向图G®=<V,E>
- 它的顶点集是V=X∪Y,
- 边集是E:从 x i 到 y j 的有向边 e i j ∈ E ,当且仅当 < x i , y i > ∈ R x_i到y_j的有向边e_{ij}∈E,当且仅当<x_i,y_i>∈R xi到yj的有向边eij∈E,当且仅当<xi,yi>∈R
若R是集合X(m个元素)上的一个关系,则R的关系矩阵是m×m方阵.
R − 1 R^{-1} R−1 的关系矩阵 M ( R − 1 ) M(R^{-1}) M(R−1) 是R的关系矩阵的转置矩阵
M
(
S
∘
R
)
M(S \circ R)
M(S∘R) 的计算
M
(
S
∘
R
)
=
M
(
R
)
⋅
M
(
S
)
M(S \circ R) = M(R) \cdot M(S)
M(S∘R)=M(R)⋅M(S)
(
w
i
j
)
=
⋁
k
=
1
m
(
r
i
k
∧
s
k
j
)
(w_{ij}) = \bigvee_{k=1}^{m} (r_{ik} \land s_{kj})
(wij)=⋁k=1m(rik∧skj)
M ( S ∘ R ) M(S \circ R) M(S∘R) ! = != != M ( R ∘ S ) M(R \circ S) M(R∘S)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









