






目录
实现内容
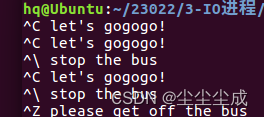
1)售票员捕捉SIGINT(代表开车)信号,向司机发送SIGUSR1信号,司机打印(let's gogogo)
2)售票员捕捉SIGQUIT(代表停车)信号,向司机发送SIGUSR2信号,司机打(stop the bus) kill(pid,)
3)司机捕捉SIGTSTP(代表到达终点站)信号,向售票员发送SIGUSR1信号,售票员打印 (please get off the bus)
4)司机等待售票员下车,之后司机再下车。fork()wait()
步骤分析
售票员(子):捕捉:SIGINT SIGQUIT SIGUSR1
忽略:SIGTSTP
司机(父) :捕捉:SIGTSTP SIGUSR1 SIGUSR2
忽略:SIGINT SIGQUIT
核心代码
#include <stdio.h>
#include <unistd.h>
#include <signal.h>
#include <sys/wait.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <stdlib.h>
pid_t pid; //两个信号处理函数和main函数都要使用pid,所以定义为全局变量;
//司机信号处理函数
void hand_bus(int sig)
{
if (sig == SIGUSR1)
{
printf(" let's gogogo!\n");
}
if (sig == SIGUSR2)
{
printf(" stop the bus\n");
}
if (sig == SIGTSTP)
{
//给指定进程(子进程乘务员)发送信号
kill(pid, SIGUSR1);
wait(NULL);
exit(0);
}
}
//乘务员信号处理函数
void hand_staff(int sig)
{
if (sig == SIGUSR1)
{
printf(" please get off the bus\n");
exit(0);
}
if (sig == SIGINT)
{
kill(getppid(), SIGUSR1);
}
if (sig == SIGQUIT)
{
//给指定进程(父进程司机)发送信号
kill(getppid(), SIGUSR2);
}
}
int main(int argc, char const *argv[])
{
if ((pid = fork()) < 0)
{
perror("fork err");
return -1;
}
else if (pid == 0) //staff
{
//忽略其他信号
signal(SIGTSTP, SIG_IGN);
//接收乘务员要处理的信息,执行乘务员信号处理函数
signal(SIGINT, hand_staff);
signal(SIGQUIT, hand_staff);
signal(SIGUSR1, hand_staff);
}
else //bus
{
//忽略其他信号
signal(SIGINT, SIG_IGN);
signal(SIGQUIT, SIG_IGN);
//接收司机要处理的信息,执行乘务员信号处理函数
signal(SIGTSTP, hand_bus);
signal(SIGUSR1, hand_bus);
signal(SIGUSR2, hand_bus);
}
while (1)
pause();
return 0;
}演示结果















 1133
1133











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









