






论文地址
RCNN物体检测的主要步骤如下:
训练:
- 监督预训练:利用ILSVRC 2012进行预训练,lr=0.01
- 在VOC 2012 train上微调:将CNN最后的1000分类初始化为21分类(20个VOC 类别+背景),使用VOC通过selective search的warped region proposals进行微调。-----所有的region proposals,如果和ground-truth锚框的IoU≥0.5,则视为该类别的positive,其它视为negative。使用SGD,lr=0.001,在每次SGD的Iteration,在所有类别上均匀采样32个positive框以及96个背景框,组成128的mini-batch
- 类别分类:注意没有直接使用微调后的CNN进行分类,而是转换为21个二分类SVM问题,在每个二分类中,利用CNN倒数第二层提取出的4096维特征向量以及对应的labels训练,labels的计算方式是(如果region与ground-truth锚框的IoU≥0.3,视为positive,否则为negative) ,在VOC 2012 trainval上优化SVMs
- Bounding box回归:最后一个池化层pool输出的特征去训练一个线性回归模型,以预测新的检测框
测试:
- selective search产生2000个region proposals(使用selective search’s “fast mode”)
- 将这2000个region proposals转化大小为227X227(在转化之前,bounding box需要进行膨胀,各边16像素)
- 输入到训练的Alexnet得到4096维的特征向量
- 对2000个特征向量使用训练的21个SVM测试
- 使用贪婪NMS,如果一个区域与一个更高分数的区域IoU超过阈值,则去除
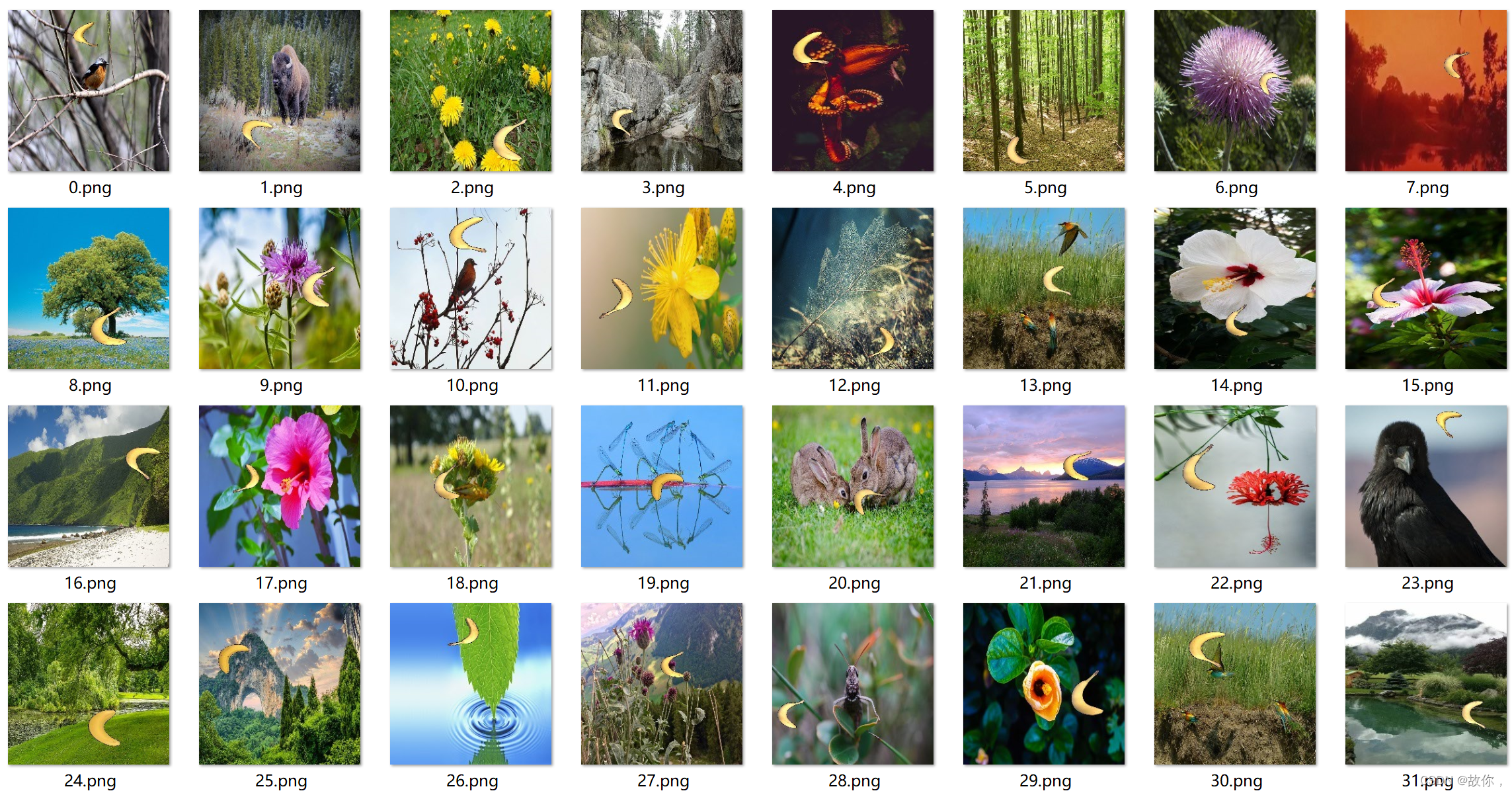
VOC 2012 数据集较大,类别多,总体的实践步骤较为复杂,这里编写简化版本的RCNN对香蕉数据集进行物体检测。香蕉数据集来自于沐神《动手学深度学习》,数据集中包括1000张训练集与100张验证集,需要检测的物体只有香蕉这一个类别,如下所示。
总体实现步骤为:
训练:
- 计算proposal regions:(10mins)对每张训练图片利用selective search生成proposal regions,这里直接使用opencv-contrib-python库里的函数,如果没有该库,注意在pip install opencv-contrib-python之前,应先pip uninstall opencv-python。
def cal_pro_region(img_path):
'''计算每张图片的proposal region
Args:
img_path: 图片所在路径
Returns:
np.array: proposal region的坐标, 大小为num*4, 4列分别[xmin, ymin, xmax, ymax]
'''
ss = cv2.ximgproc.segmentation.createSelectiveSearchSegmentation()
ss.setBaseImage(cv2.imread(img_path))
ss.switchToSelectiveSearchFast()
rects = ss.process()
rects[:, 2] += rects[:, 0]
rects[:, 3] += rects[:, 1]
return rects
- Alexnet微调:对训练集与验证集的每张图片,计算该图片所有候选区域的IoU值,将IoU≥0.5的区域视为positive,0.1<IoU≤0.5的区域为negative,保存候选区域与标签,生成用于Alexnet微调的新数据集。这里训练大概也需要10分钟,最后保存相应网络参数。
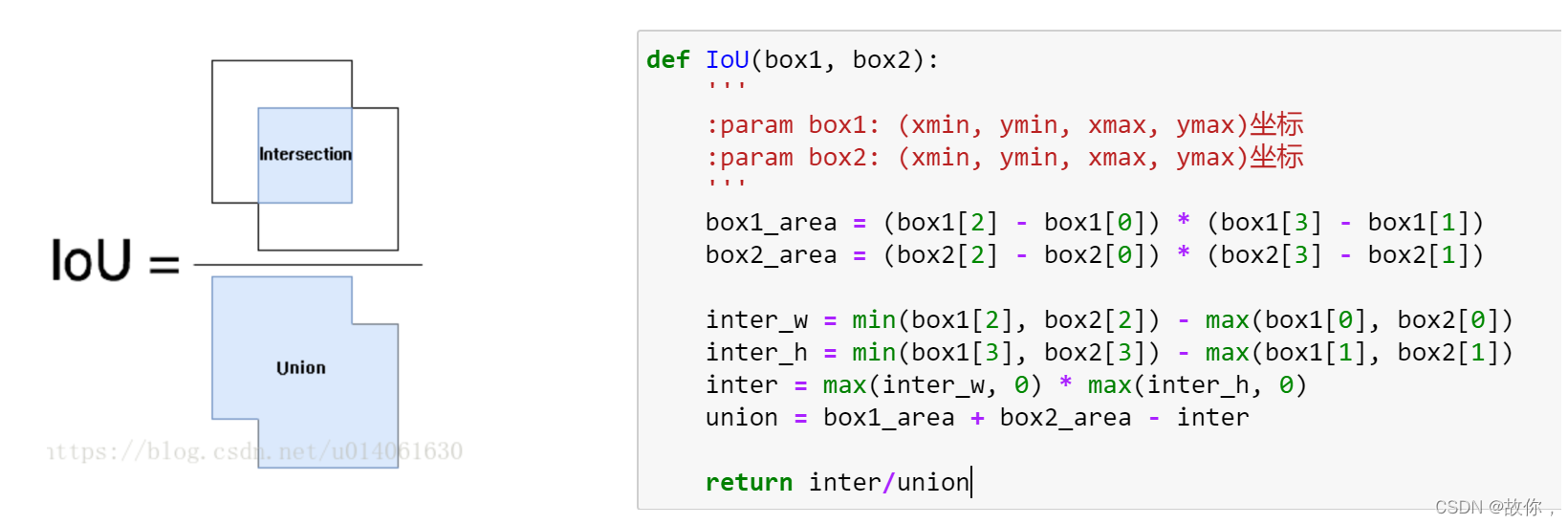
单检测框的IoU计算方式可如下图所示:
预训练的Alexnet是通过pytorch的torchvision.models.alexnet(pretrained=true)获得的。
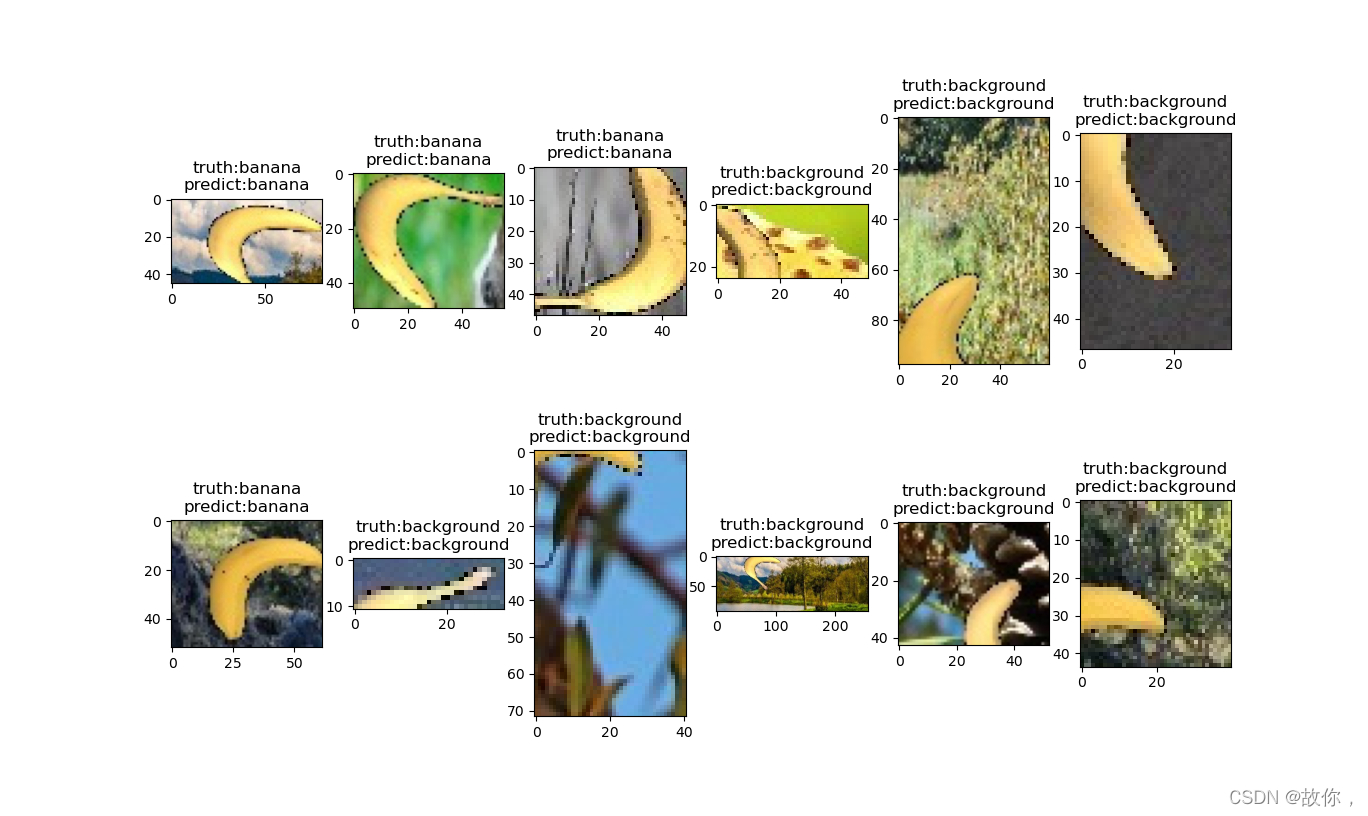
之后利用上述新数据集来微调Alexnet,最终测试精度为96%左右。网络的预测结果大致如下:
- Bounding box回归:利用微调的Alexnet的最后一个池化层输出的特征,训练一个线性回归模型,以预测当前proposal region的坐标与真实坐标之间的偏移。训练时间同样10分钟左右,保存网络训练参数。
(注:不再进行svm的训练,直接利用Alexnet的分类结果)
测试:
- 对测试图片,利用selective search算法生成候选区域-proposal regions,将每个proposal region图像输入训练的Alexnet二分类网络中得到预测标签(即banana或者background)
- 将预测标签为banana的区域,所对应的Alexnet的最后一个池化层输出的特征,输入训练的线性回归模型,得到预测的检测框角点坐标偏移值。我们将预测的偏移值L1范数作为评价标准,选取最小值对应的区域坐标(加上偏移值)作为最终检测框。
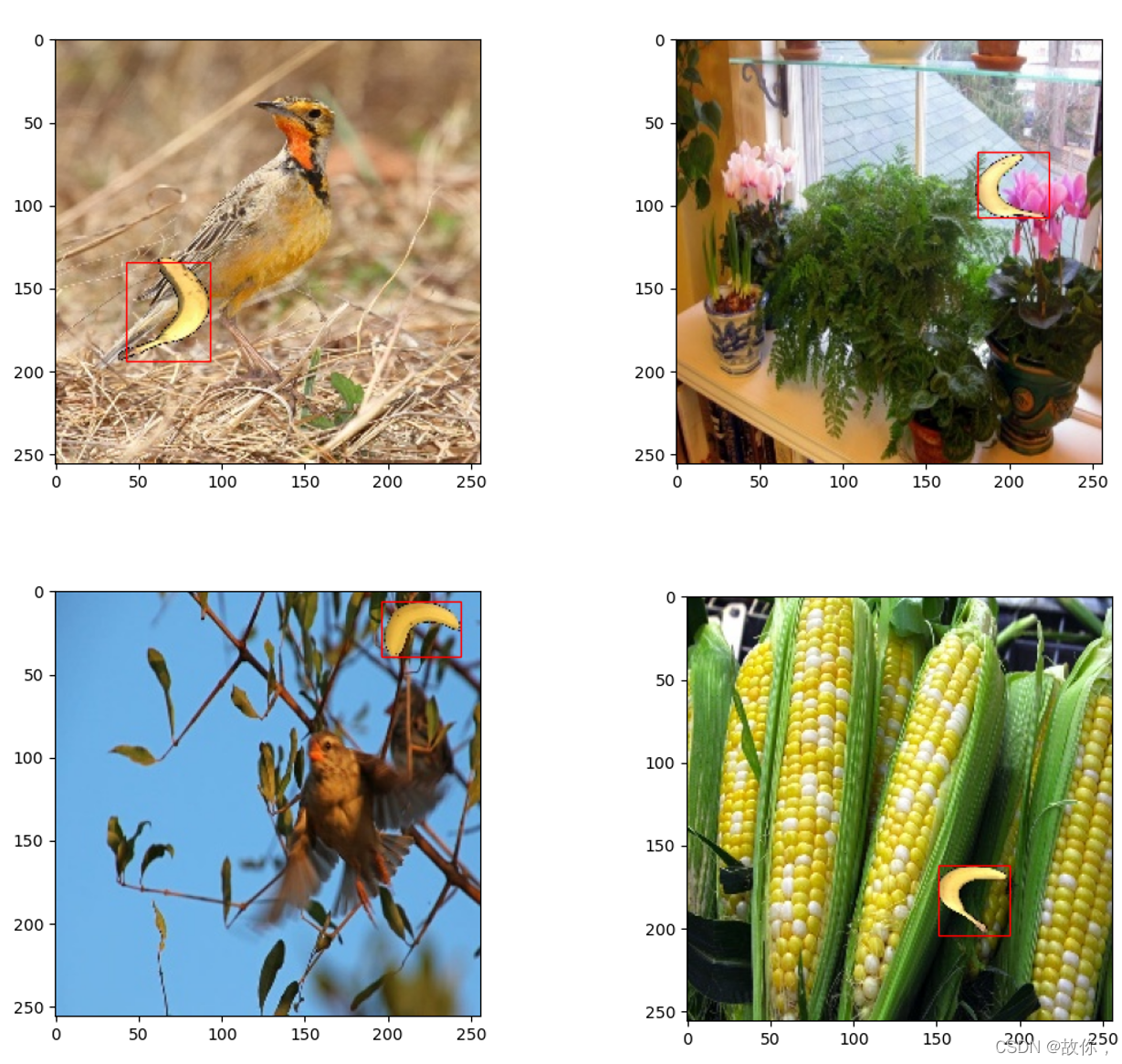
最终的检测结果如下图所示:
总结:
该实现对原始版本的RCNN进行了简化实现,主要体现在: - 所使用的数据集较为简单,只有香蕉这一个类别
- 直接利用Alexnet的分类结果,而不再训练多余的svm分类器
- 最终检测框是以预测偏移值绝对值之和最小为评判标准,没有实现NMS
- bounding box没有进行原论文中各边16像素的膨胀,而是直接resize成227*227
所有代码放在https://github.com/Myshrry/RCNN-for-Banana-Dataset
共勉~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









