






文章标题:永磁同步电机仿真研究——无位置传感器控制及弱磁控制策略
一、引言
永磁同步电机(PMSM)是一种高效、节能的电机类型,其广泛应用于各种工业和家用设备中。在永磁同步电机的控制中,无位置传感器控制技术尤为重要,它通过算法来估算电机转子的位置和速度,以实现电机的精确控制。本文将重点研究永磁同步电机的仿真模型,特别是无位置传感器控制技术和弱磁控制策略。
二、永磁同步电机仿真模型
永磁同步电机仿真模型主要涉及电机的数学模型和控制模型。在仿真中,我们需要建立一个精确的PMSM数学模型,包括电机的电气特性、机械特性和热特性等。此外,我们还需要建立一个控制模型,以实现对电机的精确控制。
三、无位置传感器控制技术
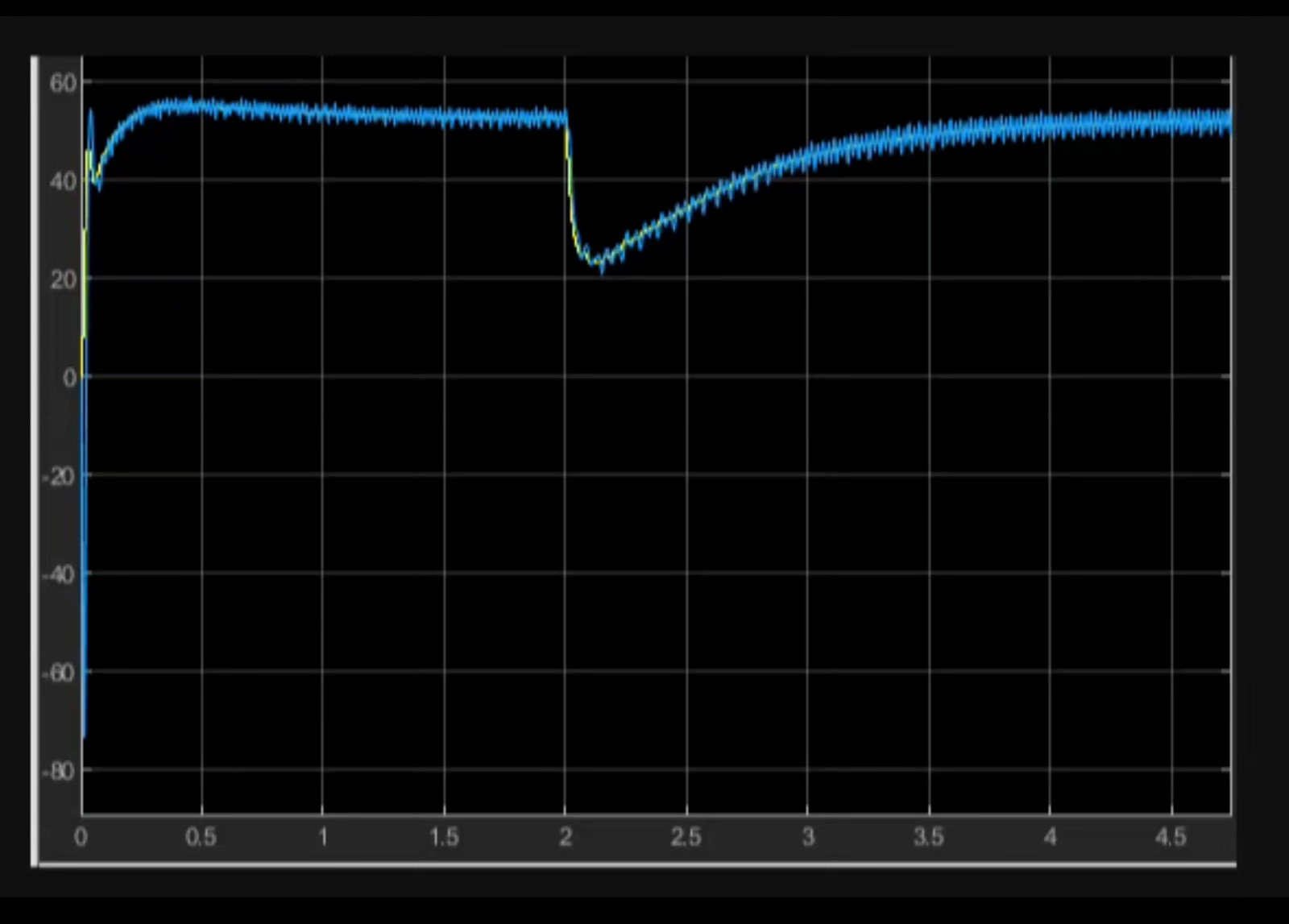
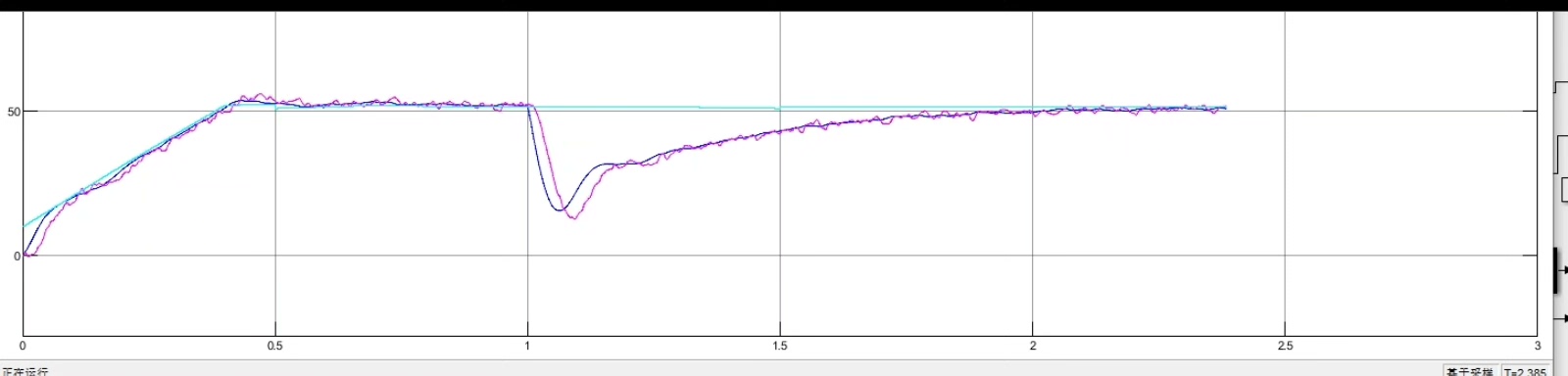
无位置传感器控制技术是PMSM控制中的关键技术之一。其中,扩张状态观测器、超螺旋滑模和扩展卡尔曼滤波等技术被广泛应用于PMSM的无位置传感器控制中。这些技术可以通过算法估算电机的转子位置和速度,从而实现电机的精确控制。在仿真中,我们可以使用这些技术来构建PMSM的无位置传感器控制模型。
四、脉振高频注入技术仿真模型
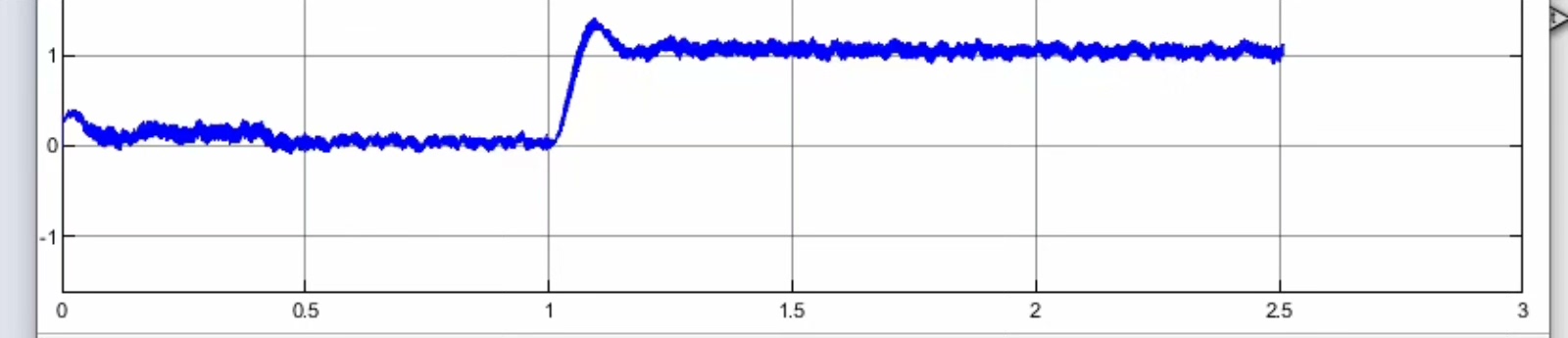
脉振高频注入技术是一种常用的PMSM无位置传感器控制方法。该方法通过向电机注入高频信号,并根据电机的响应来估算转子的位置和速度。在仿真中,我们可以建立脉振高频注入技术的仿真模型,包括方波和正弦两种注入方式的模型。需要注意的是,仿真模型不能带有实际负载,以避免对仿真结果的影响。
五、弱磁控制策略
弱磁控制是PMSM控制中的另一个重要策略。它可以通过调整电机的电压和超前角来实现电机的弱磁控制,从而提高电机的效率和性能。在仿真中,我们可以研究电压弱磁和超前角弱磁两种控制策略,并对其进行分析和比较。
六、结论
本文研究了永磁同步电机的仿真模型,包括无位置传感器控制技术和弱磁控制策略。通过建立精确的仿真模型,我们可以更好地理解PMSM的工作原理和控制策略,为实际的应用提供有力的支持。未来,我们将继续深入研究PMSM的控制技术和应用,以推动电机技术的发展和应用。
永磁同步电机仿真(pmsm,无位置传感器控制(扩张状态观测器,超螺旋滑模,扩展卡尔曼滤波)
脉振高频注入(有方波和正弦两种)仿真模型。
可以带负载书上的模型不能带
弱磁控制有电压弱磁和超前角弱磁



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









