






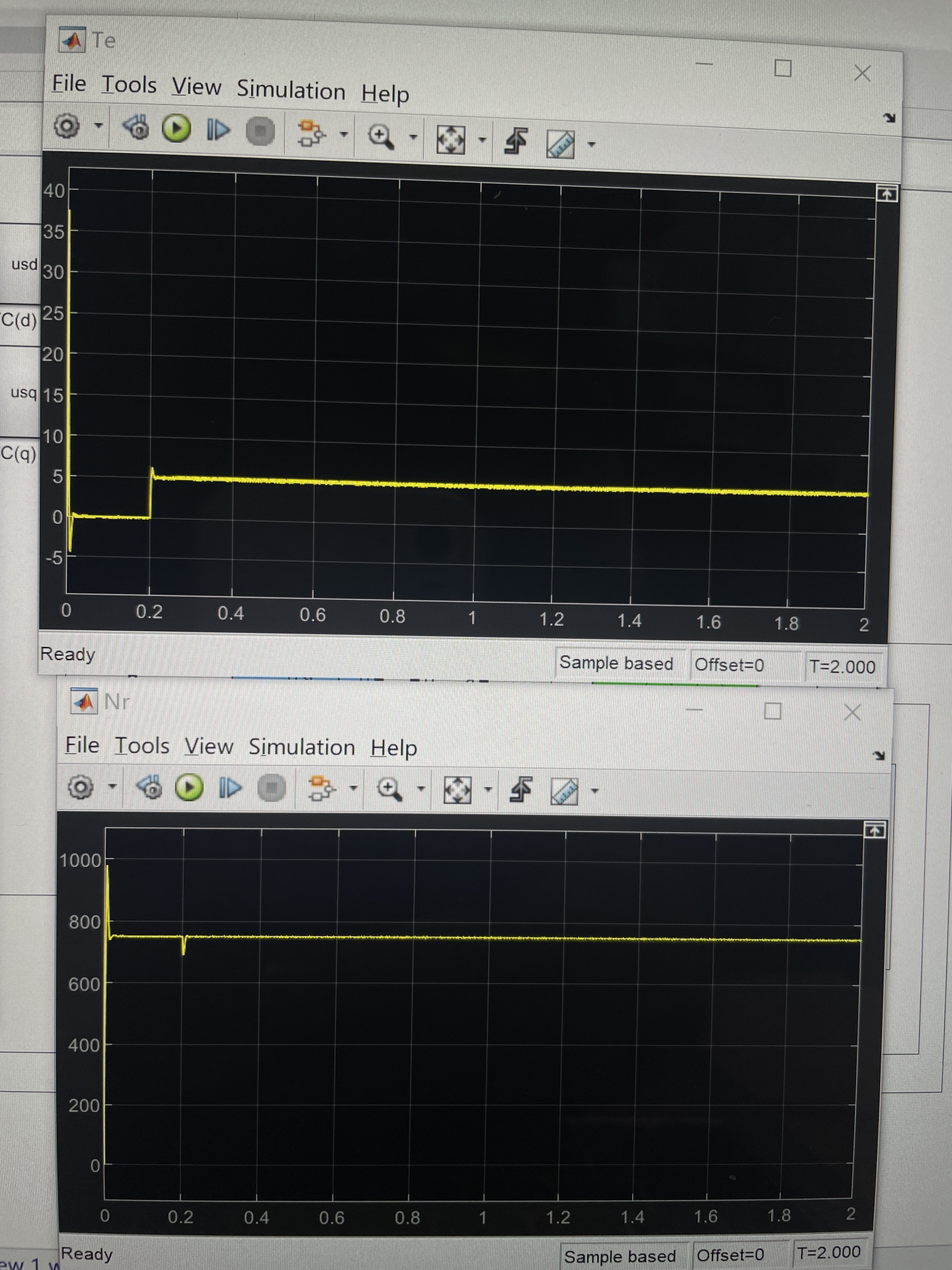
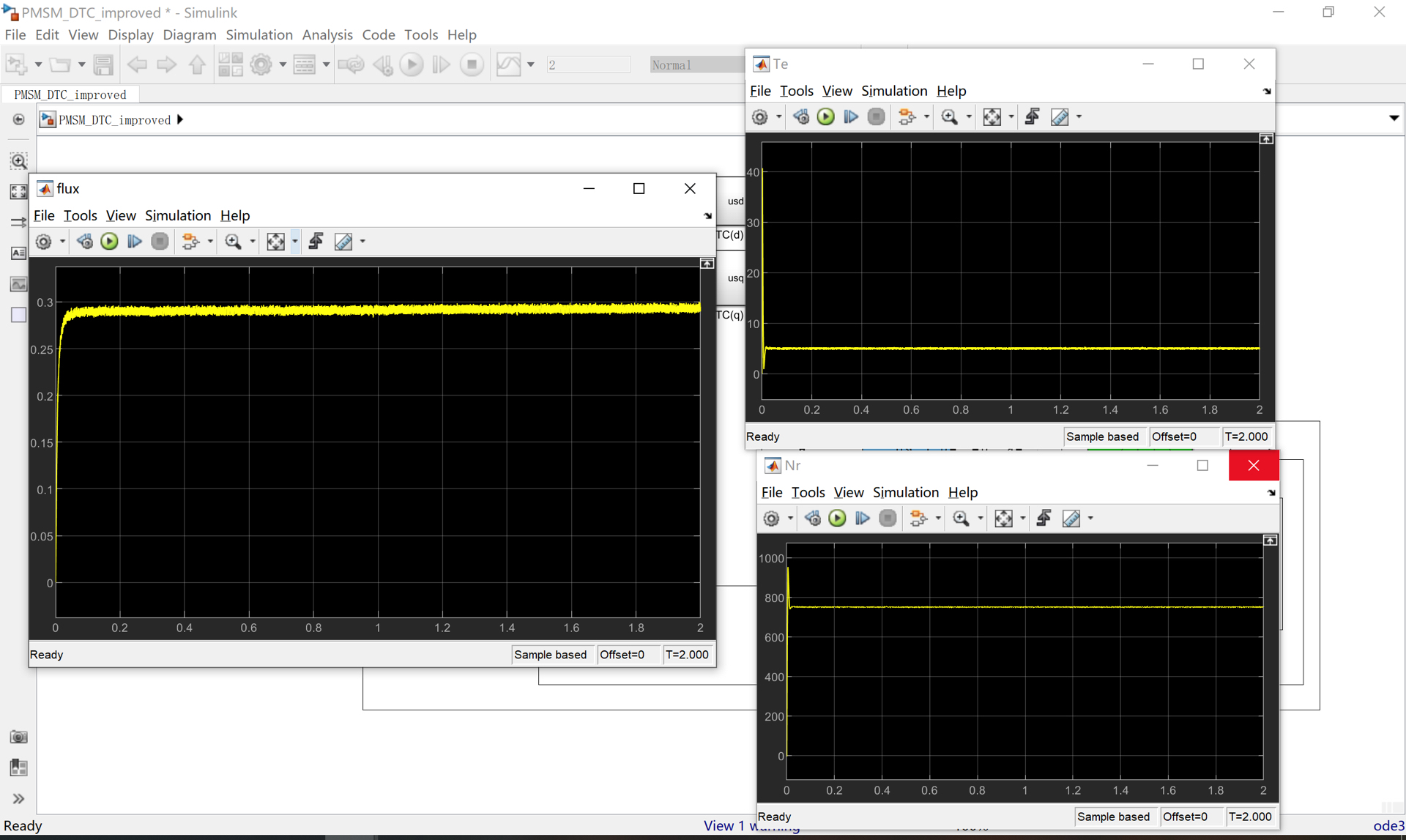
永磁同步电机PMSM基于滑模控制的直接转矩控制
,带载和突加负载如图所示
ID:8640671887859353
来杯柠檬水儿
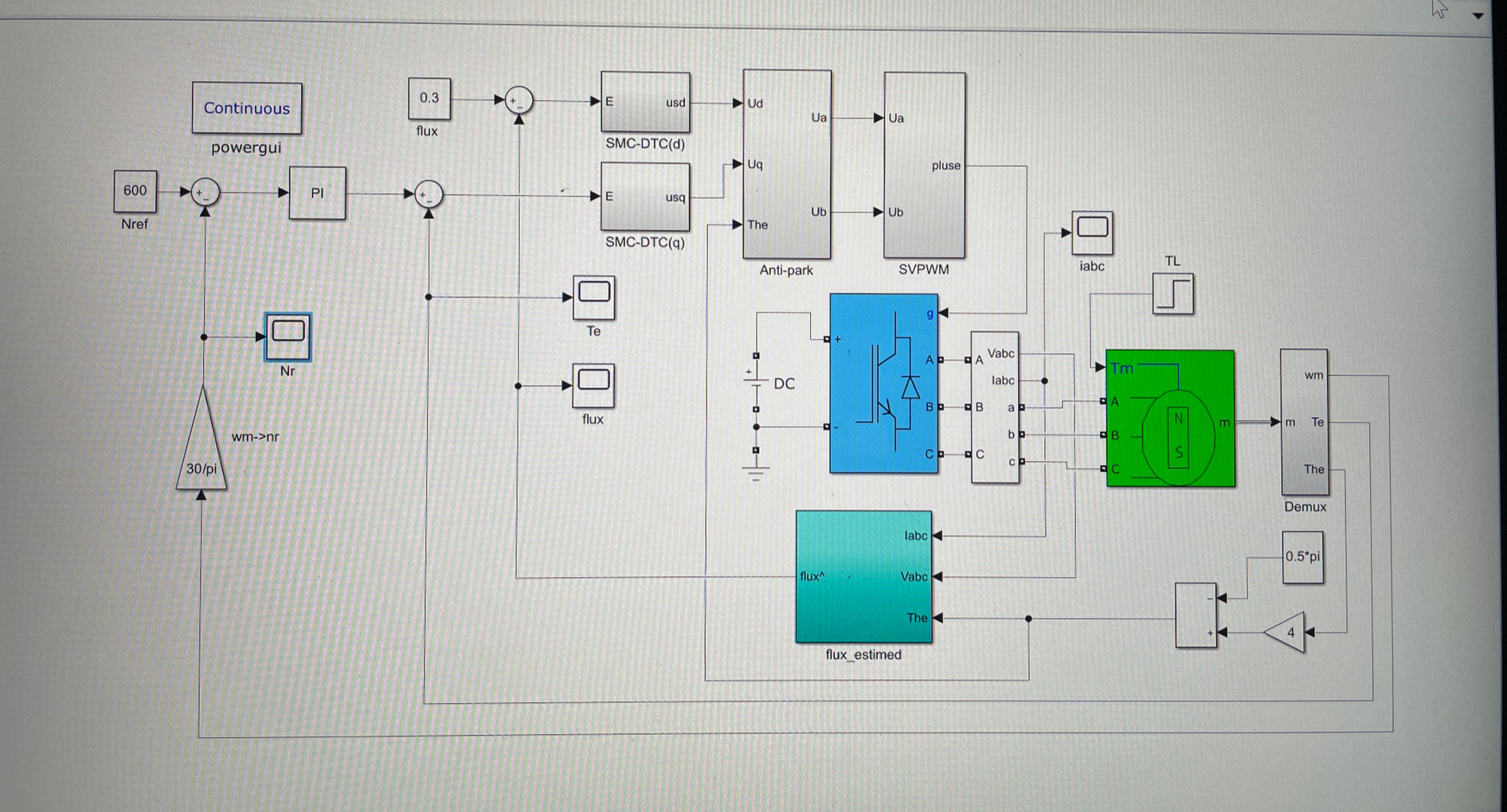
近年来,永磁同步电机(PMSM)在工业领域得到了广泛应用,其高效能、高性能以及较低的维护成本使其成为许多工程师的首选。然而,PMSM控制面临的一个重要挑战是如何实现对电机转矩的直接控制。为了解决这一问题,滑模控制技术被引入PMSM控制系统中。
滑模控制是一种基于变结构控制的方法,通过对系统状态进行快速跟踪和调节,实现对转矩的直接控制。与传统的PID控制相比,滑模控制具有快速响应、强适应性和鲁棒性强等优点。在PMSM控制中,滑模控制可以通过调节系统的滑模面和控制器参数来实现对电机转矩的精确控制。
在滑模控制的基础上,带载和突加负载对PMSM控制系统的性能和稳定性产生了一定的影响。在实际应用中,PMSM常常需要承受来自外部负载的变化和突发冲击。这些负载的变化会导致电机转矩的波动,对系统的稳定性和响应速度提出更高的要求。因此,如何在滑模控制下实现对带载和突加负载的精确控制成为了一个研究的热点。
针对这一问题,研究者们提出了一种基于滑模控制的直接转矩控制方法,通过优化滑模面和调节器参数,实现对带载和突加负载的精确控制。该方法通过对电机负载变化的预测和跟踪,可以在短时间内对负载的变化进行响应,并且保持系统的稳定性和鲁棒性。在实际应用中,该方法的控制性能已经得到了验证,并取得了良好的效果。
此外,在PMSM控制中,还可以通过其他技术手段来进一步提高系统的性能和稳定性。例如,可以通过引入反馈补偿技术来消除电机系统中的非线性因素,从而提高系统的精度和稳定性。同时,通过优化调节器参数和控制策略,也可以进一步提高系统的响应速度和控制效果。
综上所述,永磁同步电机PMSM基于滑模控制的直接转矩控制是一种有效的控制方法,可以实现对电机转矩的精确控制。在带载和突加负载等变化环境下,该方法具有较好的鲁棒性和稳定性,能够满足工程应用的要求。未来,我们可以进一步研究和探索更加先进的控制方法,进一步提高PMSM系统的性能和稳定性。
相关的代码,程序地址如下:http://wekup.cn/671887859353.html
















 472
472











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









