







前言
激光雷达包含多个模块,每个模块都有不同的技术路线方案,平时探讨比较的多的机械式,混合固态,全固态激光雷达主要是指扫描模块的区别,不同架构直接影响雷达体积和寿命,所以最容易被工程师识别。不过激光器选择905nm,940nm和1550nm波长激光器,EEL or VCSEL,SiPM or SPAD,这些不同技术路线对激光雷达硬件架构和信号处理算法都有较大差异,激光雷达的探测距离,点云精度,可靠性等不同性能存在差异,各有优缺点。
市场在用的激光雷达技术方案不只是单个模块技术路线不同,而是多个模块采用不同技术方案选型,所以在评价激光雷达性能时发现多个指标参数有差异。
下面就对各个模块技术路线做详细介绍,并大概介绍激光雷达主流产品的方案是什么。


激光雷达架构
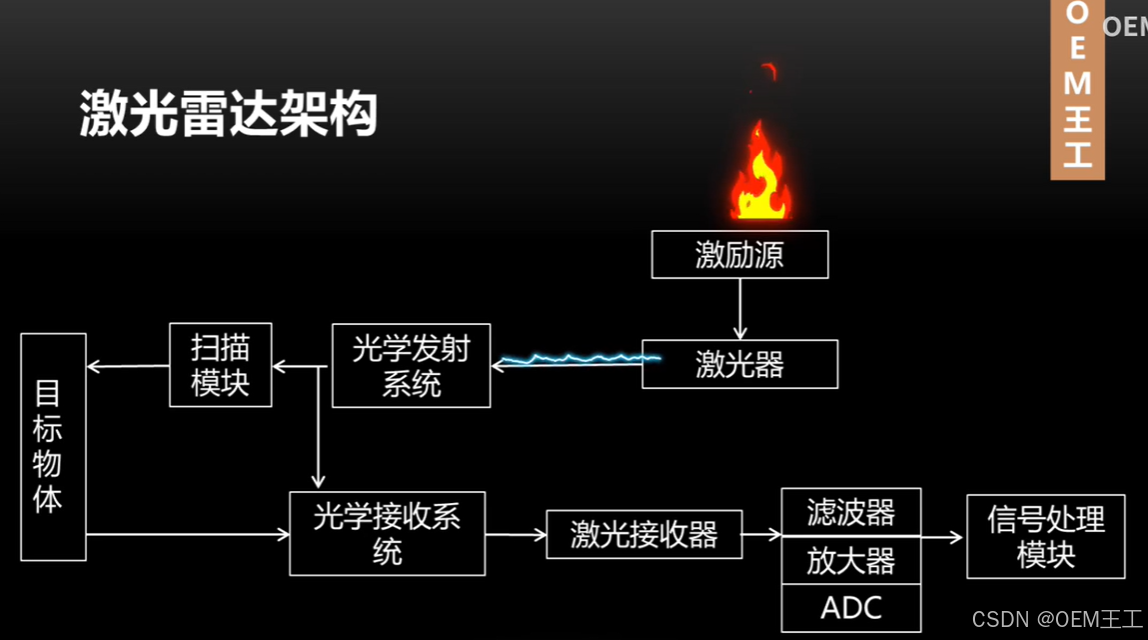
激光雷达通用型架构如下,一般分为激光发射模块,扫描模块,光路系统,激光接收模块。
激光从激励源产生通过激光器放大滤波等处理后发射到光学路的光路系统半透镜合束器聚焦,然后经过扫描模块反射最终激光发生出去扫描物体;碰到物体后返回激光到光路系统,然后到光传感器将光信号转为电信号,经过放大器,滤波器后由ADC转为数字信号,最终由信号处理模块计算出点云的探测距离,角度和反射率等信息。
激光发射模块
激光光源波段选型
激光发射模块首先需要确认使用哪个波段的光源,目前使用较多的有860nm 905nm 940nm 1550nm,有的人会有疑问红外线频谱在750nm~1mm,为什么是这几个波段?
1.外界光源的抗干扰能力和大气吸收。激光雷达属于主动式雷达,就是会发射激光后接收激光,所以光源需要比较强的抗干扰能力,如果光源的波段在可见光或者一些常用照明设备(比如车灯,路灯等)产生光源的光谱里包含的波段,这些会对雷达接收造成干扰出现噪点,造成性能下降或无法使用,而且要1mm以上的激光容易被大气吸收。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











