







一. 背景
模型中两个组件都构建成为BVH树(二叉树),需要在两颗树同级节点之间进行碰撞检测。

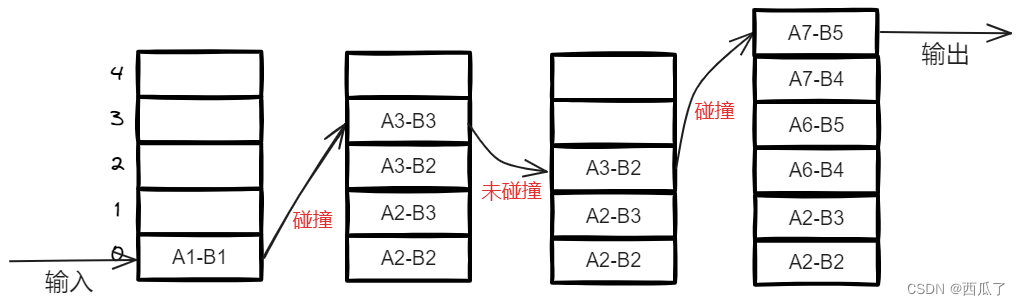
具体流程如下:首先对两棵树的根节点包围盒进行碰撞检测(A1-B1),若发生碰撞则继续对每个子节点之间进行碰撞检测(A2-B2、A2-B3、A3-B2、A3-B3),若不发生碰撞则跳过。以此类推,直到检测完某一层级节点都未发生碰撞,或者检测到有叶子节点发生碰撞,则对应返回结果。
二. 使用递归调用实现
假设节点A4与B6发生碰撞,使用函数的递归调用实现对树节点的遍历,流程图与代码如下:

AabbTreeNode* GetPosForDetection(AabbTreeNode*, AabbTree*); //获取节点的左子节点
AabbTreeNode* GetNegForDetection(AabbTreeNode*, AabbTree*); //获取节点的右子节点
Bit32 Collide(AabbTreeNode* a, AabbTreeNode* b, AabbTree* pAabbTree1, AabbTree* pAabbTree2) {
Bit32 retFlag = -1, i = 0;
//做包围盒相交判断,节点包围盒是否发生碰撞,如果判断出没有碰撞则不进行其子节点的检测
retFlag = BoxBoxOverlap(&a->bv, &b->bv);
if (retFlag == 0) {
return retFlag;
}
//判断a是否为子节点
if(IsLeaf(a, pAabbTree1) == 0) {
//判断b是否为子节点
if (IsLeaf(b, pAabbTree2) == 0) {
retFlag = Collide(GetPosForDetection(a,pAabbTree1), GetPosForDetection(b,pAabbTree2), pAabbTree1, pAabbTree2);
if(retFlag == 1) {
return retFlag;
}
retFlag = Collide(GetPosForDetection(a,pAabbTree1), GetNegForDetection(b,pAabbTree2), pAabbTree1, pAabbTree2);
if (retFlag == 1) {
return retFlag;
}
retFlag = Collide(GetNegForDetection(a,pAabbTree1), GetPosForDetection(b,pAabbTree2), pAabbTree1, pAabbTree2);
if (retFlag == 1){
return retFlag;
}
retFlag = Collide(GetNegForDetection(a,pAabbTree1), GetNegForDetection(b,pAabbTree2), pAabbTree1, pAabbTree2);
if(retFlag == 1){
return retFlag;
}
}
else {
retFlag = Collide(GetPosForDetection(a,pAabbTree1), b, pAabbTree1, pAabbTree2);
if (retFlag == 1){
return retFlag;
}
retFlag = Collide(GetNegForDetection(a,pAabbTree1), b, pAabbTree1, pAabbTree2);
if (retFlag == 1){
return retFlag;
}
else {
if (IsLeaf(b, pAabbTree2) == 0) {
retFlag = Collide(a, GetPosForDetection(b,pAabbTree2), pAabbTree1, pAabbTree2);
if (retFlag == 1) {
return retFlag;
}
retFlag = Collide(a, GetNegForDetection(b,pAabbTree2), pAabbTree1, pAabbTree2);
if (retFlag == 1) {
return retFlag;
}
else {
//a、b都是叶子节点,进入图元碰撞检测,碰撞则返回1
......
}
}
return 0; // 未发生碰撞则返回0
}三. 用栈实现
假设节点A7与B5发生碰撞,使用函数的递归调用实现对树节点的遍历,流程图与代码如下:
首先定义了栈的数据结构:
#define MAX_STNODE_NUM (100) //栈最大容纳的节点对数量
//定义栈结构
typedef struct _CollisionStack {
AabbTreeNode* nodeA; //栈存储的第一个节点包围盒
AabbTreeNode* nodeB; //栈存储的第二个节点包围盒
}CollisionStack;
typedef struct _CollisionContext {
Bit32 top; //栈顶索引
CollisionStack stack[MAX_STNODE_NUM]; //存放在栈内的节点数据
}CollisionContext;
//栈的操作方法
//元素入栈
void stackPush(CollisionStack* stack, Bit32* top, AabbTreeNode* nodeA, AabbTreeNode* nodeB) {
stack[*top].nodeA = nodeA;
stack[*top].nodeB = nodeB;
(*top)++;
}
//元素出栈
void stackPop(Bit32* top) {
if (*top <= 0) {
*top = 0;
return;
}
(*top)--;
}
//判断栈是否为空
Bit32 stackIsEmpty(Bit32 top) {
return (top <= 0);
}
用栈实现对树节点的遍历:
Bit32 CollisionCheckWithStack(AabbTree* pAabbTree1, AabbTree* pAabbTree2, CollisionContext* context) {
Bit32 ret = -1;
Bit32 i = 0;
if (context->top == 0) {
//将根节点推入栈
stackPush(context->stack, &(context->top), &pAabbTree1->treeNode, &pAabbTree2->treeNode);
}
while (!stackIsEmpty(context->top)) {
CollisionStack currentNodePair = context->stack[context->top - 1];
stackPop(&(context->top));
//进行节点包围盒检测,不碰撞则不检测其子节点
ret=BoxBoxOverlap(¤tNodePair.nodeA->bv, ¤tNodePair.nodeB->bv);
if (ret == 0) {
continue;
}
//判断节点是否为叶子节点
if (IsLeaf(currentNodePair.nodeA, pAabbTree1) == 0) {
if (IsLeaf(currentNodePair.nodeB, pAabbTree2) == 0) {
//A和B都不是叶子节点,将所有组合推入栈
stackPush(context->stack, &(context->top), GetPosForDetection(currentNodePair.nodeA, pAabbTree1), GetPosForDetection(currentNodePair.nodeB, pAabbTree2));
stackPush(context->stack, &(context->top), GetPosForDetection(currentNodePair.nodeA, pAabbTree1), GetNegForDetection(currentNodePair.nodeB, pAabbTree2));
stackPush(context->stack, &(context->top), GetNegForDetection(currentNodePair.nodeA,pAabbTree1), GetPosForDetection(currentNodePair.nodeB,pAabbTree2));
stackPush(context->stack, &(context->top), GetNegForDetection(currentNodePair.nodeA, pAabbTree1), GetNegForDetection(currentNodePair.nodeB, pAabbTree2));
}
else
{
//B是叶子节点,将A的两个子节点推入栈
stackPush(context->stack, &(context->top), GetPosForDetection(currentNodePair.nodeA,pAabbTree1), currentNodePair.nodeB);
stackPush(context->stack,&(context->top), GetNegForDetection(currentNodePair.nodeA,pAabbTree1), currentNodePair.nodeB);
}
else {
//A是叶子节点
if (IsLeaf(currentNodePair.nodeB, pAabbTree2) == 0) {
// B是内部节点,将B的两个子节点推入栈
stackPush(context->stack, &(context->top), currentNodePair.nodeA, GetPosForDetection(currentNodePair.nodeB,pAabbTree2));
stackPush(context->stack, &(context->top), currentNodePair.nodeA, GetNegForDetection(currentNodePair.nodeB,pAabbTree2));
}
else {
//a、b都是叶子节点,进入图元碰撞检测,碰撞则返回1
......
}
}
}
return 0; // 未发生碰撞则返回0
}
四. 两种方案的异同
通过流程图可以清晰的看到,在检测次数相同的情况下,使用栈比使用递归的方案从输入到输出经历的步骤更少,因此能起到优化遍历性能的效果,尤其在树的深度较大时更为明显。
其实递归也是通过栈来实现的,只不过使用递归在形成调用栈时,上层调用函数一直存留在栈底,直到该分支调用算出最终结果再一层层向上返回最终结果。而自己使用栈可以将已计算完的数据直接先出栈,同时在最后得到计算结果时直接返回出去,不需要一层层在函数间递归返回结果。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









