






基于maxwwell设计的经典200W,2200RPM 外转子,直流母线24V,42极36槽,定子外径81.5 轴向长度15 ,0.86Nm, 永磁同步电机(PMSM)设计案例,该案例可用于生产,或者学习用
基于Maxwell设计的经典200W,2200RPM外转子,直流母线24V,42极36槽,定子外径81.5,轴向长度15,0.86Nm,永磁同步电机(PMSM)设计案例,该案例可用于生产,或者学习用,欢迎咨询(0012)
近年来,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)作为一种高效、高功率密度的电机,得到了广泛的应用。本文将围绕一项基于Maxwell设计的经典200W PMSM设计案例展开讨论,分享其设计思路和技术细节,以期为生产和学习提供参考。
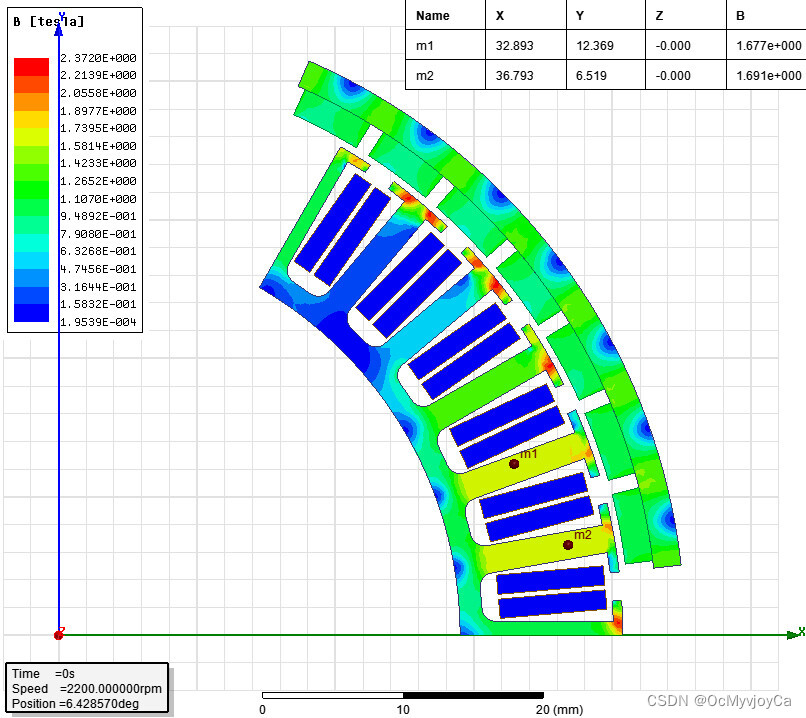
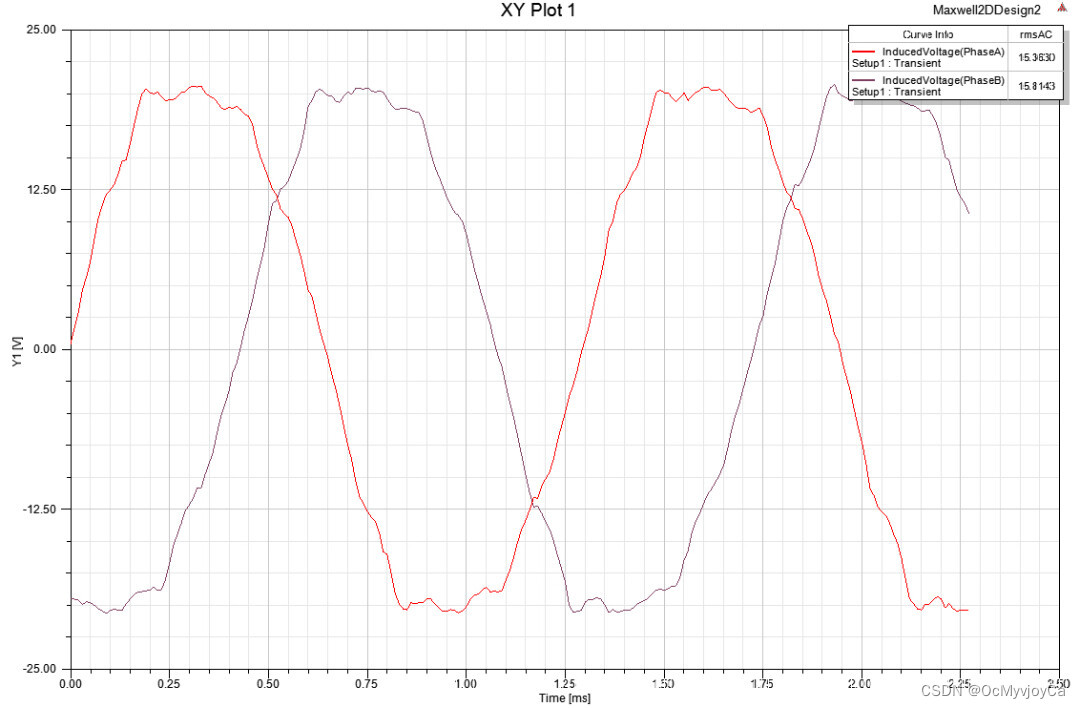
首先,让我们来了解一下所使用的Maxwell设计。Maxwell是一款功能强大的电磁场仿真软件,可用于电机设计和分析。在本案例中,我们选用了Maxwell作为设计工具,通过其丰富的功能来实现PMSM的设计。通过Maxwell软件,我们能够准确地模拟电机的电磁场分布、磁力线分布等关键参数,从而对电机进行精确的设计和优化。
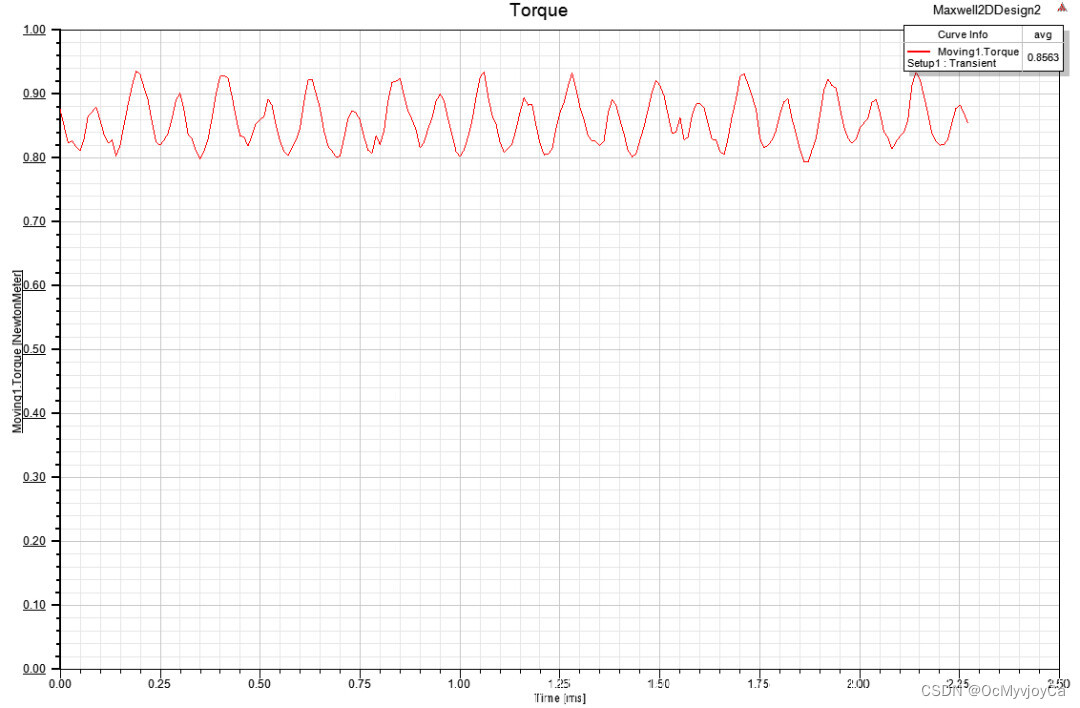
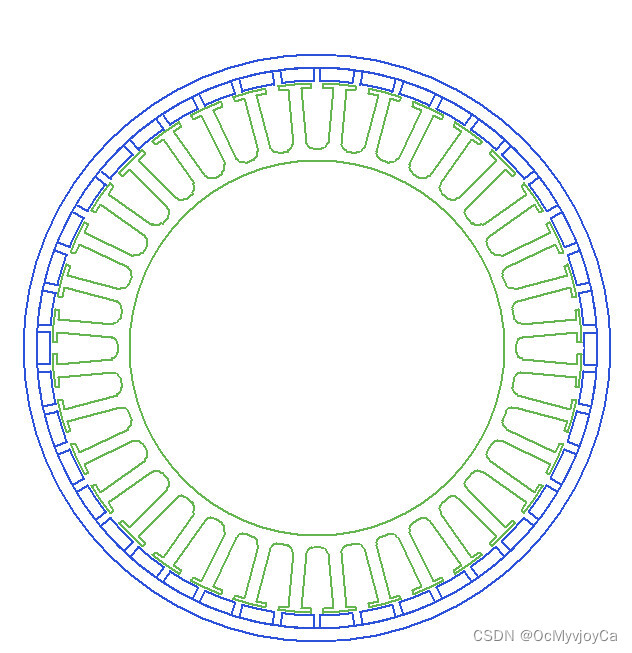
根据设计要求,本案例选择了一个外转子结构,转速为2200RPM,功率为200W的PMSM。该电机采用直流母线24V供电,定子外径为81.5mm,轴向长度为15mm,输出扭矩为0.86Nm。为了提高电机的效率和性能,我们选用了42极36槽的设计,以增加电机的磁场分布均匀性和转矩密度。
在PMSM的设计中,永磁体的选择十分关键。对于本案例而言,我们选用了一种高磁能积和高温稳定性的永磁体材料,以实现更高的转矩密度和更好的热稳定性。
在设计过程中,我们还需考虑电机的热特性。为了保证电机的正常运行,我们在设计中采用了一种有效的散热系统,以提高电机的热效率并降低温升。
除此之外,为了满足生产需求,我们还对PMSM进行了可制造性的考虑。在设计过程中,我们充分考虑了电机的加工制造工艺,以确保电机的质量和性能可控。
综上所述,基于Maxwell设计的经典200W,2200RPM外转子,直流母线24V,42极36槽,定子外径81.5,轴向长度15,0.86Nm的PMSM设计案例具备了高效、高功率密度和良好的热特性等优势。该设计案例适用于生产和学习用途,并可为电机制造商和研发人员提供参考和启示。
如有任何关于本设计案例的疑问或合作意向,请随时联系我们(0012)。
注:本文仅为技术分析文章,旨在分享PMSM设计案例,不涉及任何价格、退货、售后等商业行为或问题。
相关代码,程序地址:http://lanzoup.cn/640916840089.html















 671
671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









