






五次多项式换道轨迹规划+MPC轨迹跟踪控制simulink模型(有说明文档)
版本:Matlab R2019a / Carsim2019.1
模型采用五次多项式换道轨迹,考虑换道过程中的边界条件约束和侧向加速度约束,可以满足不同侧向加速度下的换道轨迹规划
采用MPC模型预测控制对换道轨迹进行跟随,经验证轨迹跟踪效果良好
ID:9650684786916989
qwertyuio88

五次多项式换道轨迹规划+MPC轨迹跟踪控制simulink模型(有说明文档)
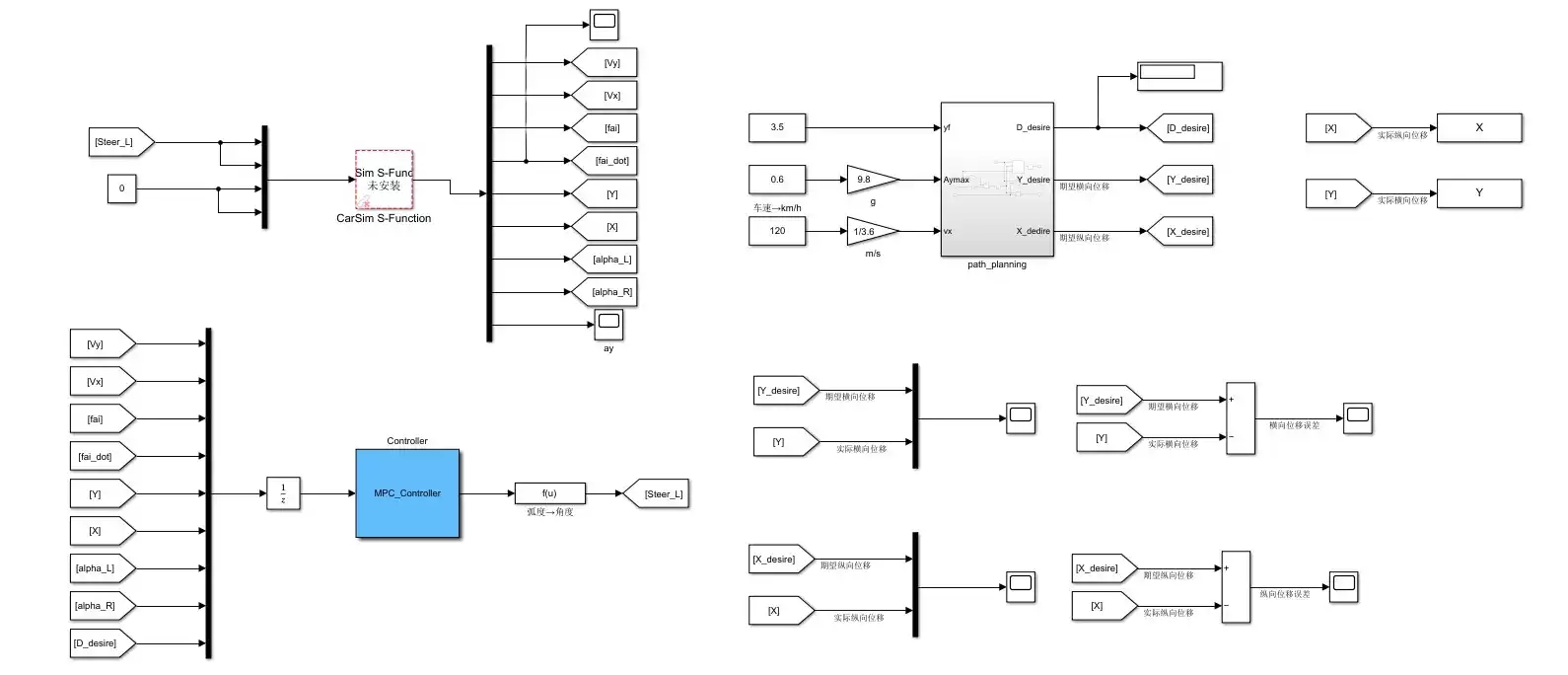
在汽车行驶过程中,往往需要进行换道操作,以便适应道路行驶情况或者进行超车等操作。而换道操作的安全和平稳性对于行驶的舒适度和驾驶员的安全性至关重要。为此,我们采用了五次多项式换道轨迹规划和模型预测控制(MPC)技术,来实现换道过程中的轨迹规划和跟踪控制。
首先介绍我们所使用的工具和环境。我们采用了最新版本的Matlab R2019a和Carsim2019.1作为开发工具和模拟环境。这些工具在汽车行驶仿真和控制分析领域具有广泛的应用,并且被广大研究者和工程师所认可。
我们的模型基于五次多项式换道轨迹规划方法。五次多项式是一种常用的曲线拟合方法,它可以通过调整各项系数来实现不同形状的曲线。在换道轨迹规划中,我们考虑了换道过程中的边界条件约束和侧向加速度约束,以保证换道的安全性和平稳性。通过合理设置参数,我们可以满足不同侧向加速度下的换道轨迹规划需求。
同时,我们采用了模型预测控制(MPC)技术对换道轨迹进行跟随。MPC是一种基于模型的控制方法,它通过预测系统的未来状态,并根据优化准则进行控制策略优化,从而实现对系统状态的精确控制。在我们的模型中,MPC会根据当前车辆状态和目标轨迹信息,预测未来若干时刻内的轨迹,并根据优化准则调整车辆的控制指令,以实现对换道轨迹的精确跟踪。
经过实验证明,我们的模型在换道轨迹跟踪方面取得了良好的效果。通过与实际行驶数据进行对比和验证,我们发现我们的模型能够准确地跟踪目标轨迹,并且在换道过程中能够保持良好的稳定性和平稳性。这说明我们的模型在实际应用中具有一定的应用前景。
总结一下,我们提出了一种基于五次多项式换道轨迹规划和MPC轨迹跟踪控制的simulink模型。通过合理设置拟合参数和优化准则,我们的模型可以实现换道轨迹的精确规划和跟踪。经过实验证明,我们的模型具有良好的性能和应用前景。此外,我们还提供了详细的说明文档,以便使用者理解和使用我们的模型。
以上是对我们的研究工作的简要介绍。我们相信,通过不断优化和改进我们的模型,我们的研究可以为汽车行驶安全和驾驶舒适性做出更大的贡献。同时,我们也希望通过分享我们的研究成果,与广大研究者和工程师进行技术交流和合作,共同推动汽车行驶控制领域的发展与创新。
相关的代码,程序地址如下:http://fansik.cn/684786916989.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









