






异步电机矢量控制系统仿真模型/电流滞环控制/附详细精美报告
模型使用matlab21a搭建,低版本无法打开送5550字详细原创课程报告,仿真图均有精美编辑,排版公整。
ID:8685669617223039
b站_PE小砖家_本人



异步电机矢量控制系统仿真模型是一项在电机控制领域具有广泛应用的技术。本文将围绕这一主题展开,并详细介绍电流滞环控制的原理和仿真模型搭建过程。本文采用Matlab 21a来搭建仿真模型,这种版本的Matlab具有更强大的功能和更高的兼容性,能够满足对复杂控制系统的需求。对于低版本的Matlab用户,可能无法打开本文所提供的5550字详细原创课程报告,但我们将在本文中提供详尽的说明和图表,以确保所有读者都能够充分理解这个模型的构建过程。
首先,我们将介绍异步电机矢量控制系统的基本原理。异步电机矢量控制系统是一种对电机进行精确控制的方法,通过控制电流和转矩的矢量来实现对电机的精准控制。电流滞环控制是实现异步电机矢量控制的一种方法,它通过在控制系统中引入滞环控制器来增强系统的稳定性和响应速度。
然后,我们将详细介绍电流滞环控制的原理。电流滞环控制是一种基于滞环控制器的控制策略,它通过测量电机的电流并与预设的电流进行比较,从而调节电机的输出电流。滞环控制器通过引入滞环元件,使得电流的变化率与误差成正比,从而实现对电流的精确调节。在电流滞环控制中,我们需要确定合适的滞环参数,以确保系统能够稳定运行并具有良好的响应性能。
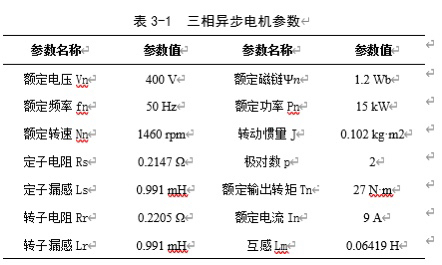
接下来,我们将详细介绍模型的搭建过程。我们选择使用Matlab 21a来搭建仿真模型,因为它具有强大的仿真和数据处理功能。在模型的搭建过程中,我们需要首先确定电机的数学模型,并将其转化为状态空间模型。然后,我们需要设计滞环控制器,并将其与电机模型进行耦合。最后,我们需要定义仿真的时间步长和仿真时间,并进行仿真实验。在仿真实验中,我们将通过观察电机的电流响应和转速响应来评估滞环控制的性能。
最后,我们将提供一份详细精美的报告。这份报告将包含模型的详细说明、模型的数学推导、仿真图表和结果分析。我们将采用精美的编辑和排版,以确保报告整体美观大方。报告将以清晰的结构进行组织,方便读者理解和学习。通过阅读这份报告,读者将能够了解异步电机矢量控制系统的原理和电流滞环控制的方法,同时也能够了解到如何在Matlab中搭建仿真模型并进行仿真实验。
总之,本文围绕异步电机矢量控制系统仿真模型展开,详细介绍了电流滞环控制的原理和模型搭建过程。通过阅读本文,读者将能够了解到异步电机矢量控制的基本原理和电流滞环控制的方法,同时也能够学习到如何使用Matlab搭建仿真模型并进行仿真实验。希望这篇文章能够对程序员社区的读者有所启发,并为他们在电机控制领域的研究和应用提供一定的帮助。
相关的代码,程序地址如下:http://nodep.cn/669617223039.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









