









我参考B站上的视频《FPGA(ZYNQ)上运行UC/OS的实例-TCP通讯》,在自己的ZYNQ开发板上移植uCOSIII操作系统,配置BSP,这里记录部分步骤。
软件:Vivado 2017.4
芯片:xc7z010clg400-1
硬件设计
第一步:新建Vivado工程,创建Block Design,在Block Design中添加ZYNQ7 Processing System IP核。
第二步:配置ZYNQ7 Processing System IP核。
配置PS的UART,点击Peripheral I/O Pins页面,选择UART1,我的板子引出的是MIO48和MIO49,波特率设置为115200。
 配置PS的Ethernet,点击Peripheral I/O Pins页面,选择Ethernet0,我的板子用的PHY芯片是RTL8211E,Ethernet0引出的是MIO16~MIO27,MDC和MDIO分配到MIO52、MIO53。
配置PS的Ethernet,点击Peripheral I/O Pins页面,选择Ethernet0,我的板子用的PHY芯片是RTL8211E,Ethernet0引出的是MIO16~MIO27,MDC和MDIO分配到MIO52、MIO53。
 MIO Configuration页面的设置如下图所示。
MIO Configuration页面的设置如下图所示。
 最后把剩下的所有GPIO MIO选中,留作他用(点灯)。DDR3、PS时钟、中断等配置按自己的需求来,这里不记录了。配置好的Block Design如下图所示。
最后把剩下的所有GPIO MIO选中,留作他用(点灯)。DDR3、PS时钟、中断等配置按自己的需求来,这里不记录了。配置好的Block Design如下图所示。
 第三步:验证当前设计,生成顶层HDL模块,导出硬件,启动SDK。
第三步:验证当前设计,生成顶层HDL模块,导出硬件,启动SDK。
软件设计
第一步:下载uCOSIII代码。
可以到开头视频给的网站上下载。网址:https://github.com/suisuisi/zynq_guide/tree/main/ucos。这是开发操作系统的公司针对ZYNQ的Cortex-A9 CPU移植好的代码,我们不需要做任何修改,只需在SDK中配置一下可以。
 第二步:在SDK中导入uCOSIII代码。
第二步:在SDK中导入uCOSIII代码。
解压下载后的压缩包,将uCOSIII代码文件夹放到自己的工程目录下。
 点击SDK软件上方的Xilinx->Repositories,在Local Repositories栏中导入uCOSIII代码文件夹的路径,点击“OK”。
点击SDK软件上方的Xilinx->Repositories,在Local Repositories栏中导入uCOSIII代码文件夹的路径,点击“OK”。
 第三步:新建应用。
第三步:新建应用。
OS Platform选择ucos,点击“Next”。下一页选择Micrium uc/OS-III Hello World模板。(其他模板也可试一试)。

 第四步:配置BSP。
第四步:配置BSP。
右击左侧的ucos_base_bsp,点击Board Support Package Settings,打开配置BSP的界面。
 Ovrview中按下图勾选模块,我选了必须要的三个模块,其他模块按需勾选。其中ucos_standalone模块允许我们在代码中使用Xilinx提供的外设驱动代码。
Ovrview中按下图勾选模块,我选了必须要的三个模块,其他模块按需勾选。其中ucos_standalone模块允许我们在代码中使用Xilinx提供的外设驱动代码。
 在ucos_standalone中,将stdin和stdout设置为ps7_uart_1,也就是前面我们在硬件设计中选中的UART1。
在ucos_standalone中,将stdin和stdout设置为ps7_uart_1,也就是前面我们在硬件设计中选中的UART1。
 在drivers中,将ps7_ethernet_0的驱动选为ucos_emacps,留着后面做网络实验用(本文未涉及)。
在drivers中,将ps7_ethernet_0的驱动选为ucos_emacps,留着后面做网络实验用(本文未涉及)。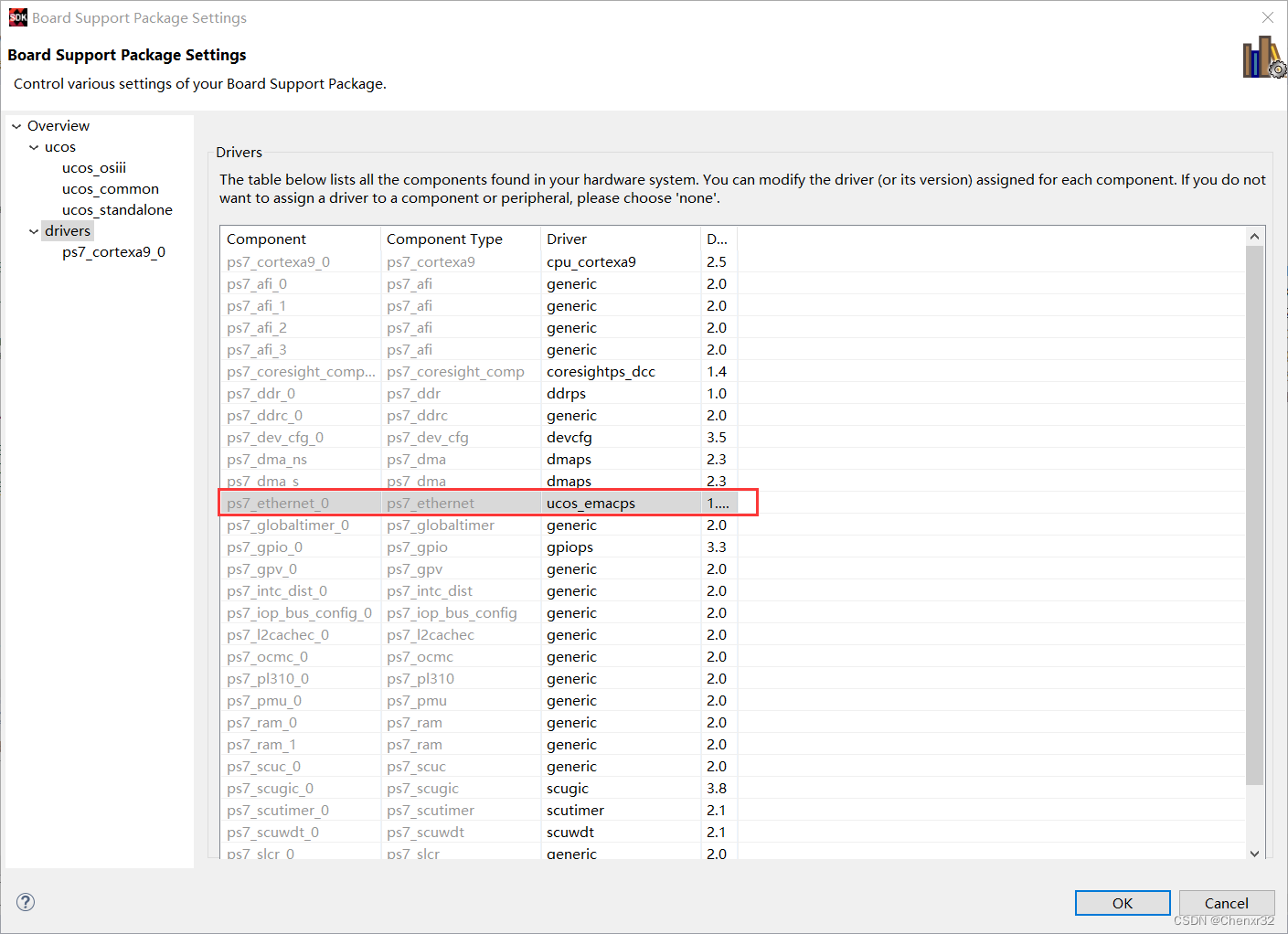 第五步:写代码。
第五步:写代码。
ucos_base->src->app.c里有自动生成的代码,可以直接编译下载到板子上实验。
#include <stdio.h>
#include <Source/os.h>
#include <ucos_bsp.h>
void MainTask (void *p_arg);
int main()
{
UCOSStartup(MainTask);
return 0;
}
void MainTask (void *p_arg)
{
OS_ERR os_err;
UCOS_Print ("Hello world from the main task\r\n");
while (DEF_TRUE) {
OSTimeDlyHMSM(0, 0, 10, 0, OS_OPT_TIME_HMSM_STRICT, &os_err);
UCOS_Print("Periodic output every 10 seconds from the main task\r\n");
}
}
我还尝试了TCP和DNS的模板,开发板连接路由器,可以成功获得IP地址。
完整的工程下载地址:ZYNQ7010的uCOSIII模板 。

















 1979
1979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









