






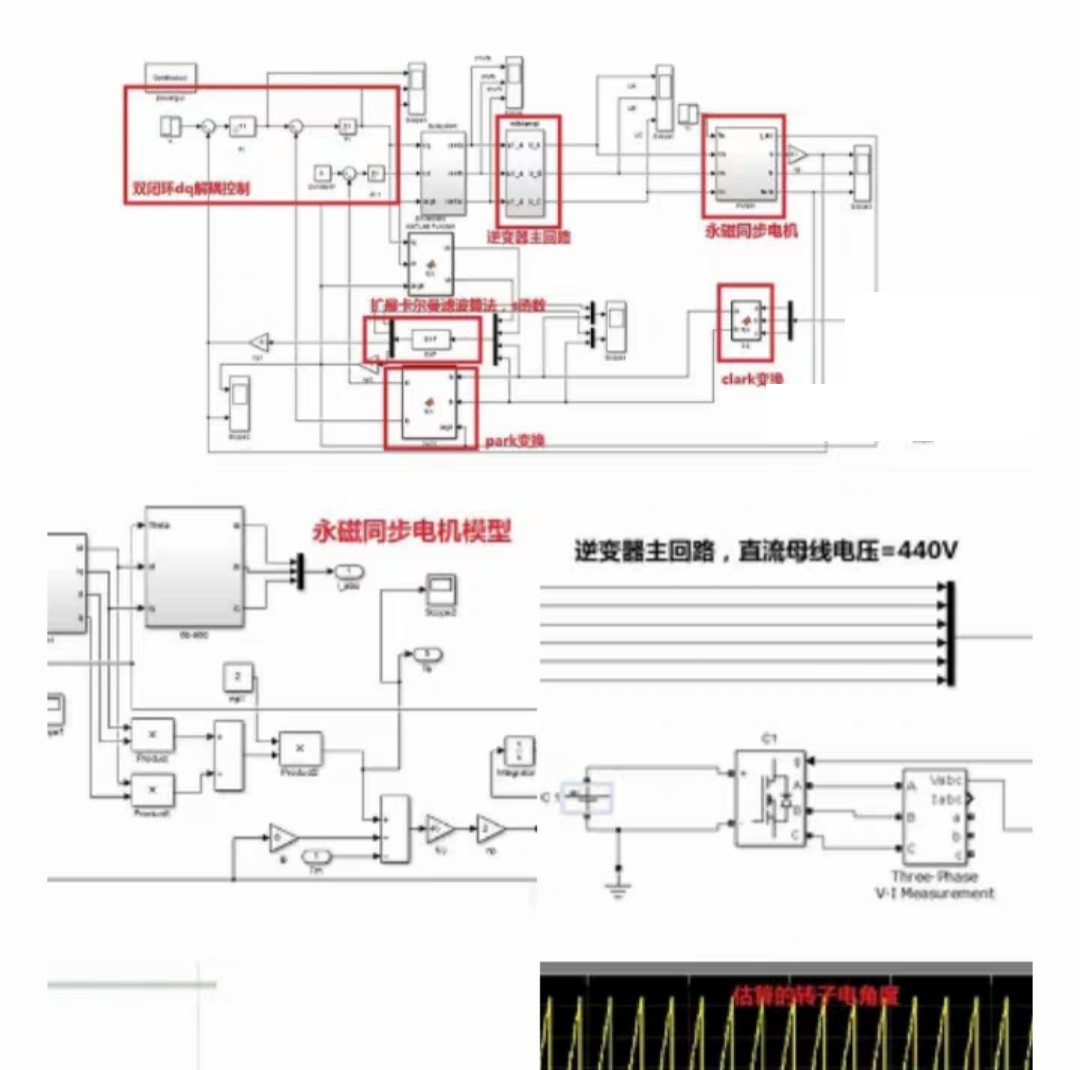
基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型。
1.依据PMSM的数学模型搭建电机模型
2.双闭环dq解耦控制,转速外环,转矩内环
3. EKF算法对电机的转子电角度和机械转速进行估算
ID:48215732078575741
今日上上签
基于扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型研究
一、引言
随着现代电力电子技术和控制理论的不断发展,永磁同步电机(PMSM)在无传感器矢量控制领域的研究日益受到关注。其中,扩展卡尔曼滤波(EKF)算法作为一种有效的状态估计方法,被广泛应用于PMSM的无传感器控制中。本文将围绕基于EKF算法的PMSM无传感器矢量控制的Simulink仿真模型展开研究,探讨其数学模型的搭建、双闭环dq解耦控制策略以及EKF算法在电机控制中的应用。
二、PMSM的数学模型搭建
PMSM的数学模型是PMSM无传感器矢量控制的基础。在Simulink中,我们需要搭建一个包含电机本体、逆变器、传感器等模块的模型。电机本体模型主要包括电气方程和机械方程,用于描述电机的动态行为。电气方程涉及电压、电流、磁链等参数,机械方程则涉及转速、转矩等参数。此外,还需要搭建一个逆变器模型,用于模拟PWM信号的产生和功率转换过程。最后,通过传感器模块获取电机的运行状态信息,如转子电角度和机械转速等。
三、双闭环dq解耦控制策略
在PMSM的无传感器矢量控制中,通常采用双闭环dq解耦控制策略。该策略包括转速外环和转矩内环两部分。转速外环负责调节电机的转速,根据转速误差调整转矩指令。转矩内环则负责根据转矩指令和电流限制条件计算dq轴电流指令。为了实现dq解耦控制,需要采用坐标变换技术,将定子电流从静止坐标系变换到旋转坐标系上。这样可以将交流电机的控制问题转化为直流电机的控制问题,简化控制策略的设计和实现。
四、EKF算法在电机控制中的应用
在PMSM的无传感器矢量控制中,EKF算法被广泛应用于电机的状态估计。通过EKF算法,我们可以对电机的转子电角度和机械转速进行实时估算。具体而言,我们需要构建一个包含电机动态方程和观测方程的状态空间模型。然后,利用扩展卡尔曼滤波算法对状态空间模型进行迭代计算,得到电机的状态估计值。这些估计值可以用于电机的控制策略中,实现无传感器矢量控制。与传统的传感器测量方法相比,基于EKF算法的状态估计方法具有更高的精度和鲁棒性。
五、仿真结果与分析
在Simulink中搭建好仿真模型后,我们可以进行仿真实验来验证基于EKF算法的PMSM无传感器矢量控制策略的有效性。通过对比仿真结果和实际运行数据,我们可以发现基于EKF算法的PMSM无传感器矢量控制策略具有良好的性能表现。在转速和转矩的调节过程中,该策略能够实现快速响应和精确控制。同时,EKF算法能够准确地估计电机的转子电角度和机械转速,为电机的无传感器矢量控制提供了可靠的基础。
六、结论
本文研究了基于扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制的Simulink仿真模型。首先介绍了PMSM的数学模型搭建方法;然后阐述了双闭环dq解耦控制策略的原理;最后重点介绍了EKF算法在电机控制中的应用。通过仿真实验验证了基于EKF算法的PMSM无传感器矢量控制策略的有效性。本文的研究为PMSM的无传感器矢量控制提供了重要的理论和实践依据。
相关的代码,程序地址如下:http://wekup.cn/732078575741.html
















 1954
1954

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









