






GRAIL Workshop 投稿
量子位 | 公众号 QbitAI
计算机视觉与模式识别会议(CVPR)作为全球计算机视觉与人工智能领域最具影响力的顶级学术会议,将于2025年6月11日至15日在美国田纳西州召开。
值此盛会,来自INRIA、华盛顿大学、MBZUAI等全球顶尖学术机构的研究团队将联合举办首届具身智能通用机器人操作研讨会和挑战赛(GRAIL)。
本次研讨会聚焦机器人操作的通用性这一关键挑战,旨在推动通用机器人技术的发展。

感兴趣的小伙伴,可以关注起来了~
 官网:https://robomani-grail.github.io/
官网:https://robomani-grail.github.io/
研讨会介绍
尽管当前的机器人操作模型在封闭、预定义的环境中已展现出优异表现,但在真实世界中仍面临诸多挑战,例如如何操作多样化的物体、适应不同的场景变化,以及执行未知的任务。
GRAIL研讨会将汇聚计算机视觉、机器人、具身智能、大模型、仿真等多领域专家,共同探讨通用机器人技术的前沿进展。GRAIL包括两大通用机器人操作挑战赛、领域专家主题报告,以及前沿论文展示。
双赛道挑战赛
GemBench挑战赛
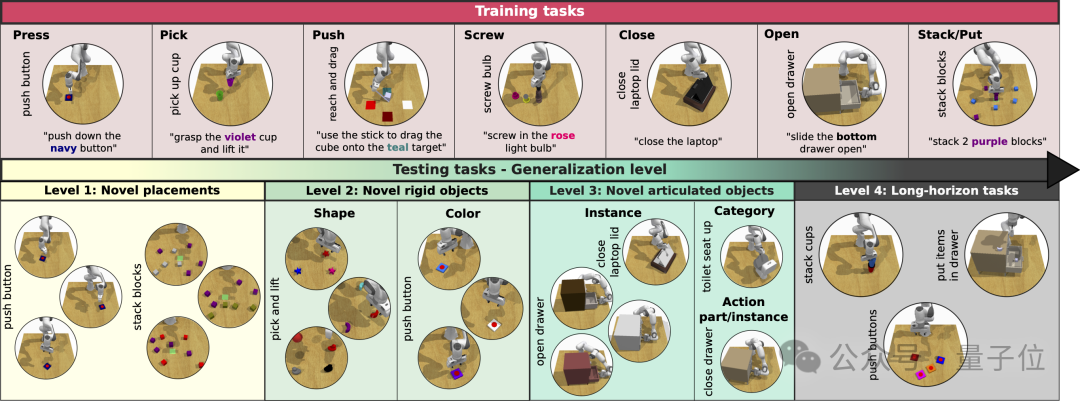
全面评测机器人在未知物体和长时序任务中的泛化能力
涵盖丰富的基础操作动作:抓取、放置、物体旋转、接触式操作(推动、按压)和铰链物体操作(开、关)
采用渐进式评测体系,逐层难度提高,包括:物体位置泛化、刚性物体泛化、铰链物体泛化、复杂长时序任务泛化
Colosseum挑战赛
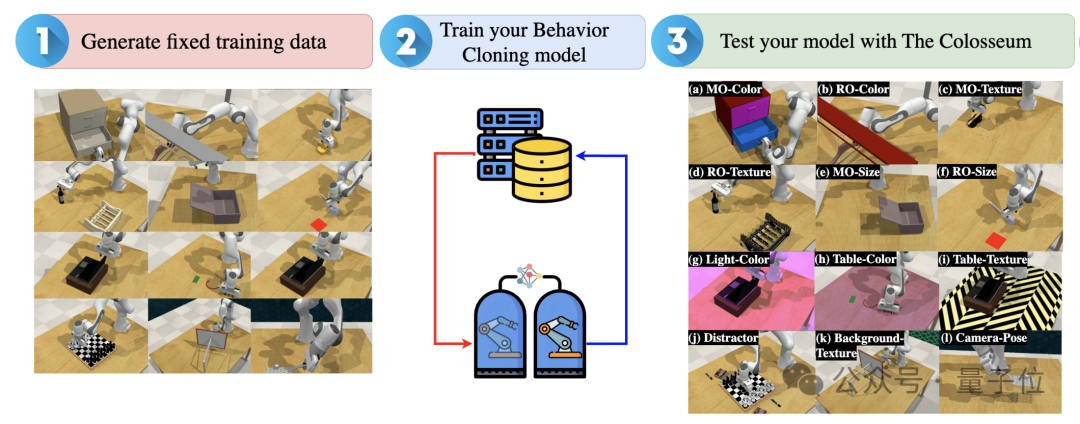
聚焦环境鲁棒性研究,系统评估机器人在 场景变化下的泛化能力,如光照、相机位姿变化等
包括20个典型任务上的14种多样化环境扰动,有效缩小仿真到现实差距
提供三级测试难度:简单simple,中等intermediate和复杂complex
为什么参加 GRAIL?
挑战前沿问题:关注机器人操作的泛化难题,尤其是机器人基础模型(Robot foundation model)的应用潜力
深入交流学习:与机器人和计算机视觉领域的专家交流最新研究进展
真实机器人验证:表现优秀的团队将有机会在真实机器人上测试方案,接触真实世界的挑战
重要日期
Challenge submission deadline: May 12, 2025
Challenge report deadline: May 19, 2025
Workshop: June 11, 2025
演讲嘉宾
组织团队
欢迎大家关注和参与,详细信息:https://robomani-grail.github.io/


















 5
5

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









