






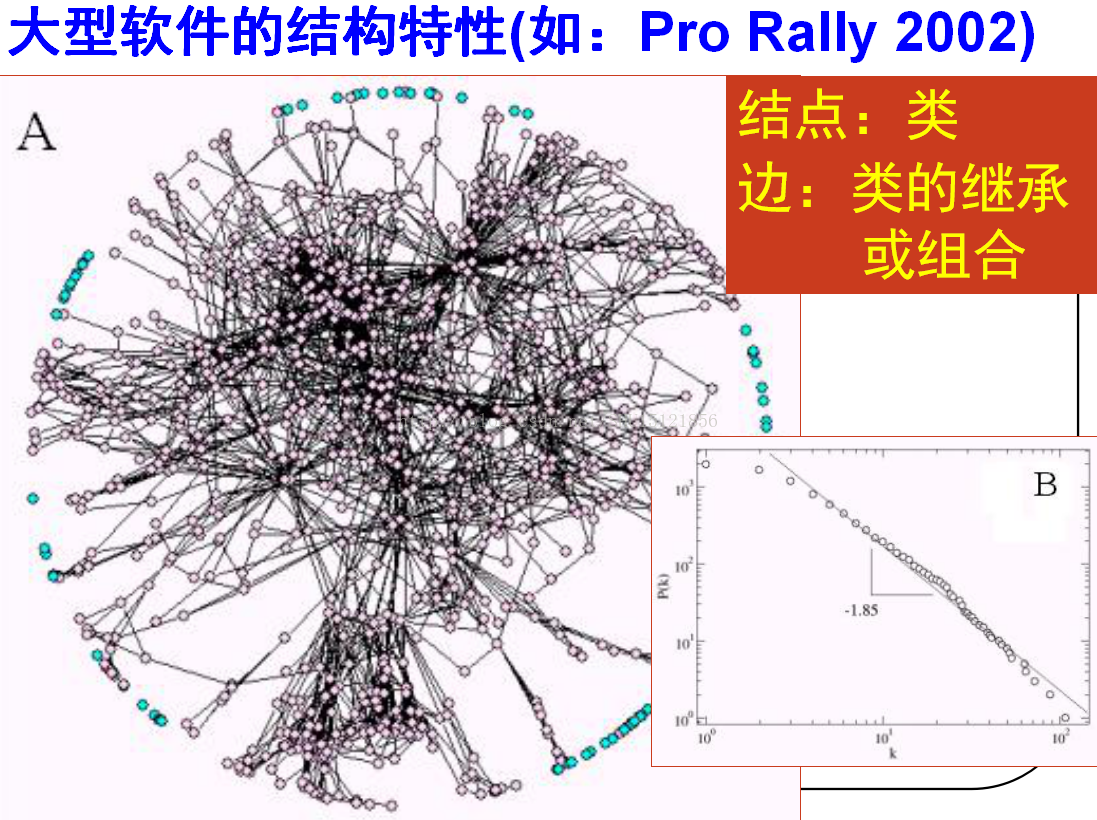
scale - free network, 现实世界的网络大部分都不是随机网络,少数的节点往往拥有大量的连接,而大部分节点却很少,一般而言他们符合二八定律。将度分布符合幂律分布的复杂网络称为无标度网络。
如互联网,大型软件的结构特性都属于无标度网络:
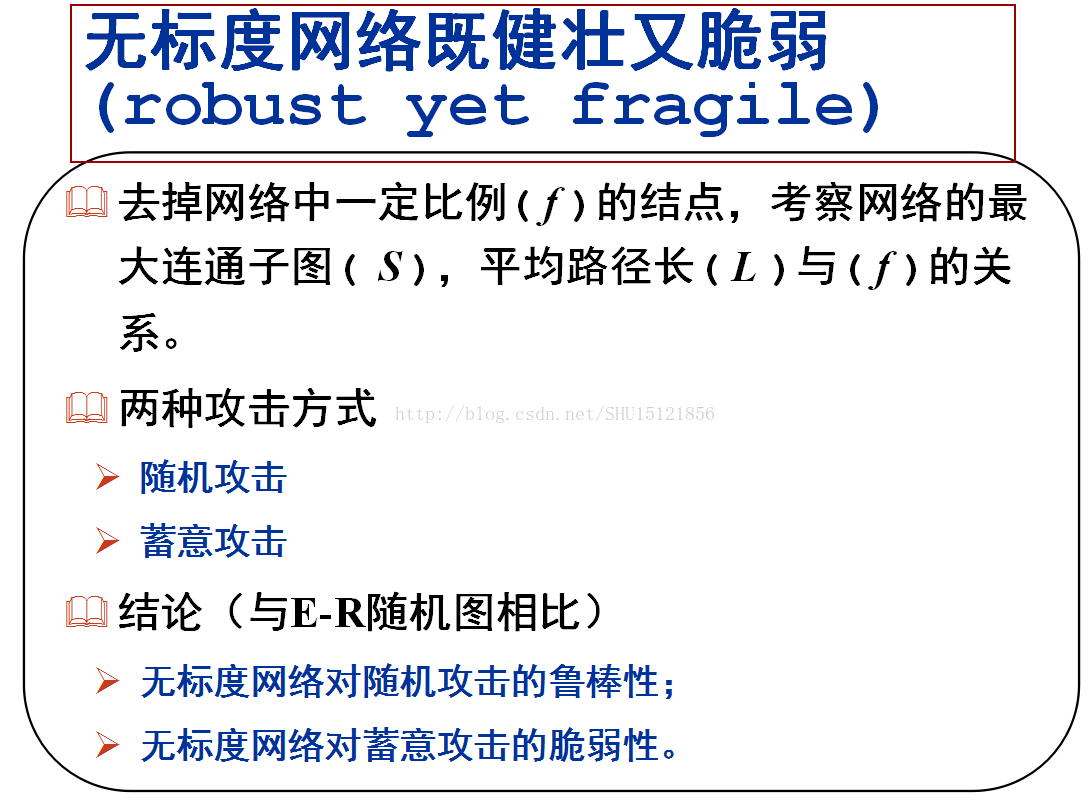
只要攻击那些度数很多的关键节点就能引起最大的攻击效益。
这也正体现了无标度网络对蓄意攻击的脆弱性(李青老师用了一个有趣的阿喀琉斯踵的故事),总结如下:
*通用异常类Error.h
#ifndef ERROR_H
#define ERROR_H
#include<iostream>
using namespace std;
//通用异常类
class Error
{
private:
char message[100];//异常信息
public:
Error(const char *mes = "一般性异常!"); //构造函数
~Error(void) {}; //析构函数
void Show() const; //显示异常信息
};
Error::Error(const char *mes)
{
strcpy_s(message, 100, mes); //复制异常信息
}
void Error::Show()const
{
cout << message << endl; //显示异常信息
}
#endif
*无向图邻接网的边节点类Arc.h
#ifndef NULL
#define NULL (void *)0
#endif
#ifndef ARC_H
#define ARC_H
//边节点类
struct Arc
{
int iNum; //弧的另一端的节点的序号
Arc* pNext; //指向下一边节点的指针
Arc(int n, Arc* next); //构造序号为n,下一节点指向next的边节点
};
Arc::Arc(int n, Arc* next)
{
iNum = n;
pNext = next;
}
#endif
*无向图邻接表的顶点节点类Vex.h
#ifndef NULL
#define NULL 0
#endif
#ifndef VEX_H
#define VEX_H
#include "arc.h"
struct Vex
{
int k;//度数
Arc* pFirst; //指向边节点表
Vex();//空构造
};
Vex::Vex()
{
k = 0;//度数一开始为0
pFirst = NULL;
}
#endif
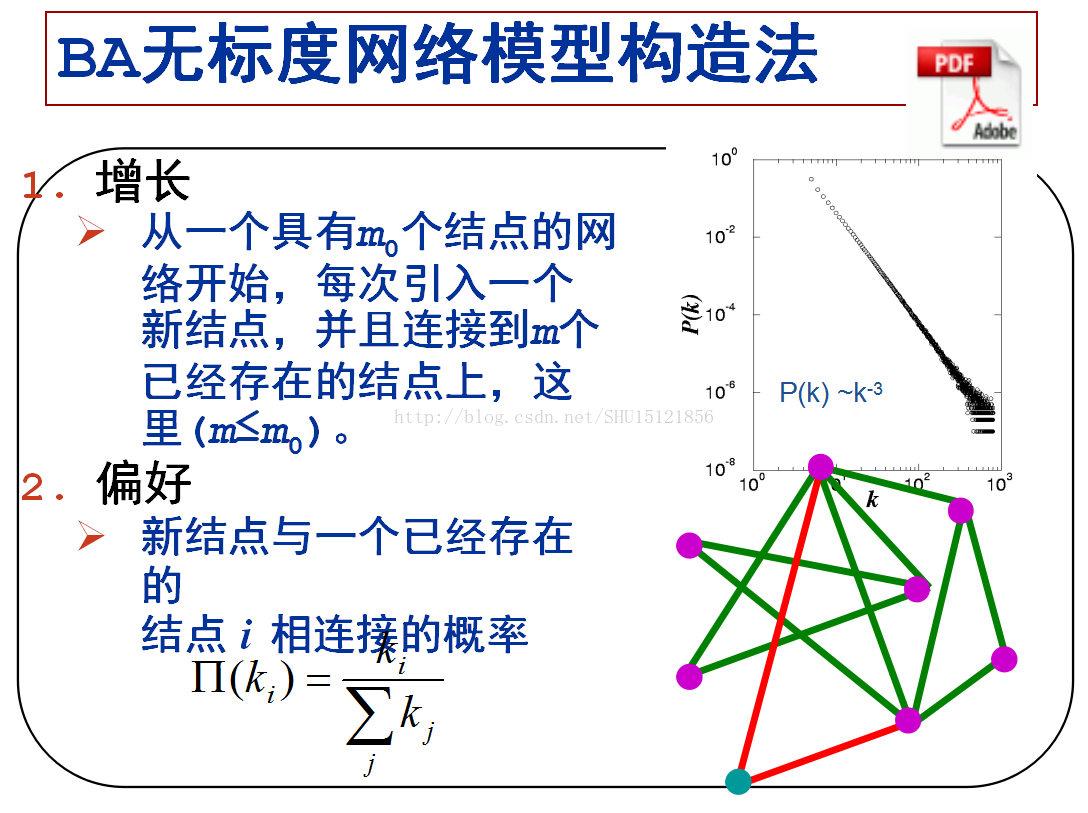
这里补充一下无标度网络的生成过程,直接搬老师PPT好了:
*邻接网络(无标度模型)类NetWork.h
#ifndef NULL
#define NULL (void *)0
#endif
#ifndef NETWORK_H
#define NETWORK_H
#include "vex.h"
#include "error.h"
#define N 4//最近邻网络
//邻接网络(无标度模型)类
struct NetWork
{
int vexNum; //顶点的数目
Vex* vexTable; //顶点表
int maxNum;//最大数目
int numMod;//k值总和,用于求余
NetWork(int v,int n); //构造有v个顶点的空表
void Clear(); //清空边节点
void BuildArc(int a, int b); //构造从a到b的边
void Step1(); //清空全表,然后形成部分最近邻网络
void Step2();//每次引入一个新节点,以概率连接到之前的点上
void Show(); //简易的显示该网络
void DelArc(int a, int b); //删除从a到b的边
bool HasArc(int a, int b); //查询是否有从a到b的边
};
NetWork::NetWork(int v,int n) //构造有v个顶点,最大为n的空表
{
if (n < v)
throw Error("n不能比v小");
vexTable = new Vex[maxNum = n];
vexNum = v;
numMod = 0;
}
void NetWork::Clear() //清空边节点
{
Arc* p;
for (int i = 0; i < vexNum; i++)
{
p = vexTable[i].pFirst; //从第一个边节点开始
while (p != NULL)
{
vexTable[i].pFirst = p->pNext; //first域连到p后去
delete p; //删掉p
p = vexTable[i].pFirst; //再次指向first的节点
}
vexTable[i].k = 0;
}
numMod = 0;//清空numMod
}
void NetWork::DelArc(int a, int b) //删除从a到b的边
{
if (a < 0 || b < 0 || a >= vexNum || b >= vexNum)
throw Error("数组越界");
if (a == b)
throw Error("自身没有环");
Arc *p, *q;
//删除a->b
if (vexTable[a].pFirst->iNum == b) //如果是第一个点
{
p = vexTable[a].pFirst;
vexTable[a].pFirst = p->pNext;
delete p;
vexTable[a].k--;
numMod -= 2;//维护
}
else //如果不是第一个点
{
q = vexTable[a].pFirst; //q在p前
p = q->pNext;
while (p != NULL)
{
if (p->iNum == b) //找到了b的位置
{
q->pNext = p->pNext;
delete p;
vexTable[a].k--;
numMod -= 2;//维护
break;
}
}
}
//删除b->a
if (vexTable[b].pFirst->iNum == a) //如果是第一个点
{
p = vexTable[b].pFirst;
vexTable[b].pFirst = p->pNext;
delete p;
vexTable[b].k--;
numMod -= 2;//维护
}
else //如果不是第一个点
{
q = vexTable[b].pFirst; //q在p前
p = q->pNext;
while (p != NULL)
{
if (p->iNum == a) //找到了a的位置
{
q->pNext = p->pNext;
delete p;
vexTable[b].k--;
numMod -= 2;//维护
break;
}
}
}
}
bool NetWork::HasArc(int a, int b) //查询是否有从a到b的边
{
if (a < 0 || b < 0 || a >= vexNum || b >= vexNum)
throw Error("数组越界");
if (a == b)
throw Error("自身没有环");
Arc* p;
bool k = 0; //k=1时表示从a到b有边
p = vexTable[a].pFirst; //不妨看a->b有没有,从第一个边节点开始
while (p != NULL) //检索是否已经有边
{
if (p->iNum == b) //检索到,做标记并跳出
{
k = 1;
break;
}
p = p->pNext; //没检索到,继续找
}
return k;
}
void NetWork::BuildArc(int a, int b) //建立从a到b的边
{
if (a < 0 || b < 0 || a >= maxNum || b >= maxNum)
throw Error("数组越界");
if (a == b)
throw Error("不能自身成环");
Arc* p;
bool k = 0; //k=1时表示从a到b有边
p = vexTable[a].pFirst; //不妨看a->b有没有,从第一个边节点开始
while (p != NULL) //检索是否已经有边
{
if (p->iNum == b) //检索到,做标记并跳出
{
k = 1;
break;
}
p = p->pNext; //没检索到,继续找
}
if (k == 0) //如果没有边,建立之
{
vexTable[a].pFirst = new Arc(b, vexTable[a].pFirst); //a能找到b同时
vexTable[b].pFirst = new Arc(a, vexTable[b].pFirst); //b也要能找到a
vexTable[a].k++;
vexTable[b].k++;
numMod += 2;//维护
}
}
void NetWork::Step1() //清空全表,然后形成部分近邻网络
{
int n;
if (N > vexNum)
n = 2;
else
n = N;
Clear(); //清空
for (int i = 0; i < vexNum; i++) //对每个节点i
{
for (int j = 1; j <= n / 2; j++) //建立其n最近邻关系
{
BuildArc(i, (i + j) % vexNum); //向后第j个
BuildArc(i, (i - j + vexNum) % vexNum); //向前第j个
}
vexTable[i].k = n;//度数肯定为n,这句可有可无,Build时已经做好了
}
numMod = n*vexNum;//初始化,这句可有可无,Build时已经做好了
}
void NetWork::Step2()
{
int randomNum;//存储随机数
int sum = 0;//sum用于寻找这个随机数落在哪里,这样就形成了概率
for (int i = vexNum; i < maxNum; i++)//对后面未建立的每个节点
{
sum = 0;//每次sum都清空
randomNum = rand() % numMod;//只要对numMod取余就一定在0~numMod之间
for (int j = 0; j < i; j++)
{
sum += vexTable[j].k;//sum不断加上这个k值
if (sum>randomNum)//说明落在这里
{
BuildArc(i, j);//函数里面已经对k值和numMod进行维护了
break;//找到后跳出小for()
}
}
}
vexNum = maxNum;//执行完后vexNum可以充满整个数组
}
void NetWork::Show() //显示
{
Arc* p; //辅助指针
cout << "一共可以存" << maxNum << "个节点" << endl;
for (int i = 0; i < vexNum; i++)
{
cout << i << "("<<vexTable[i].k<<"):";
p = vexTable[i].pFirst; //从第一条边开始
while (p != NULL) //对于每条边
{
cout << "->" << p->iNum;
p = p->pNext;
}
cout << endl;
}
}
#endif
*程序入口wbd.cpp
// wbd.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <iostream>
#include "NetWork.h" //邻接网络(无标度模型)类
using namespace std;
#define OK 25
#define MAXI 100
int _tmain(int argc, _TCHAR* argv[])
{
try{
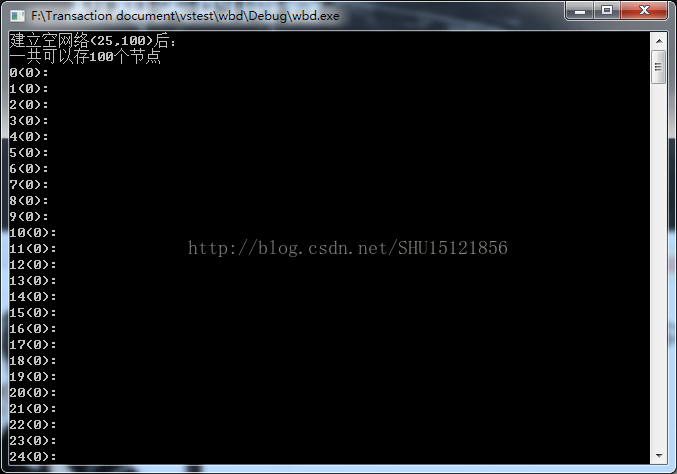
cout << "建立空网络(" << OK << "," << MAXI << ")后:" << endl;
NetWork *pNet = new NetWork(OK,MAXI); //建立空网络(有效OK,满MAXI)
pNet->Show(); //显示看一下
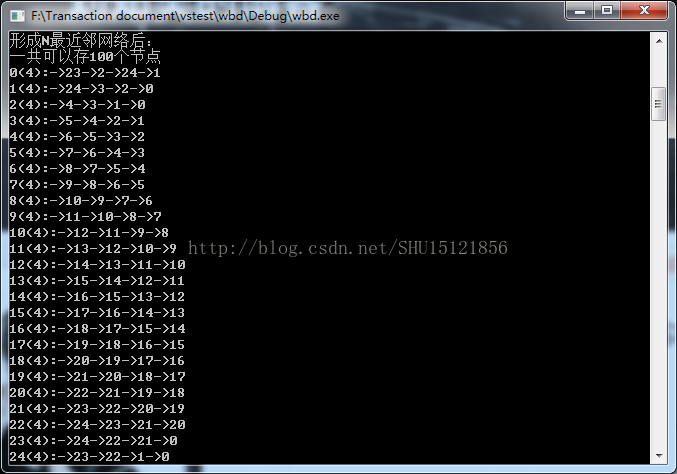
cout<<endl << "形成N最近邻网络后:" << endl;
pNet->Step1(); //对有效点形成N最近邻网络
pNet->Show(); //显示看一下
cout <<endl<< "偏好增长后:" << endl;
pNet->Step2(); //偏好增长
pNet->Show(); //显示看一下
system("pause");
return 0;
}
catch (Error er)
{
er.Show();
}
return 0;
}
运行结果:
先生成空网络,我这里有效=25,开的数组=100
再生成最近邻网络(是其它的什么网络也可以),我这里N=4
最后进行偏好增长,这是获取无标度特性的最关键的步骤
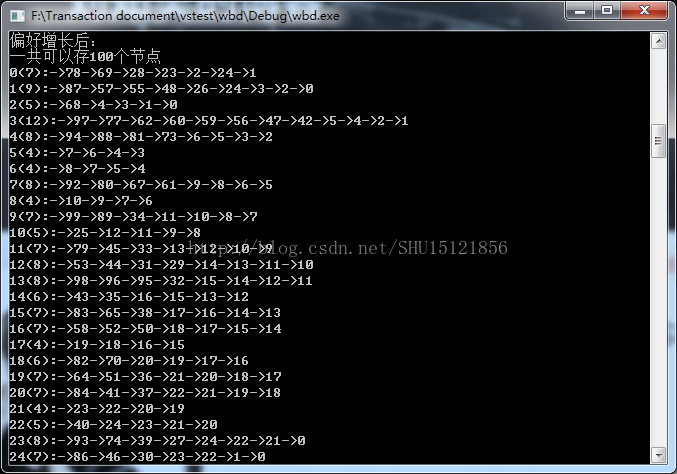
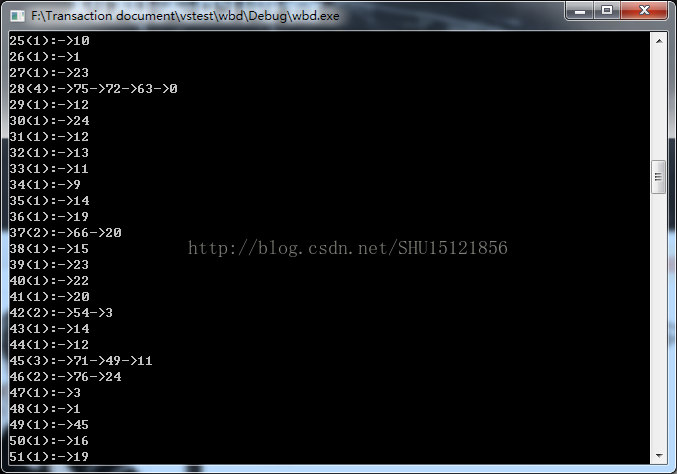
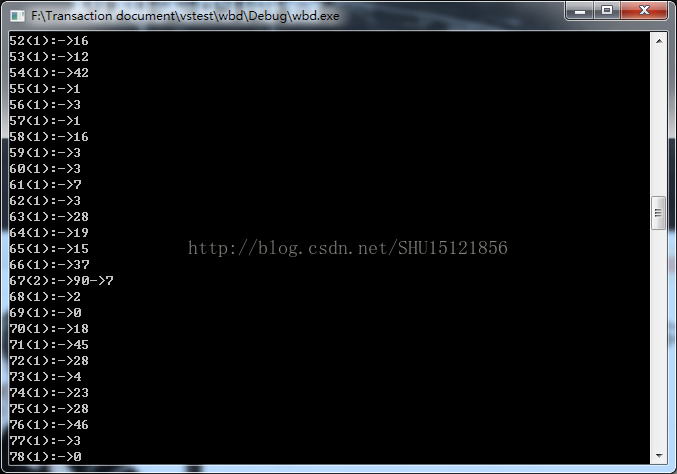
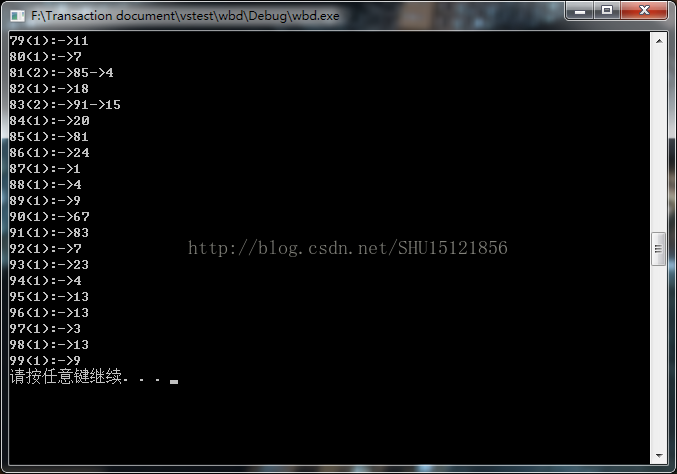
可以看到前面的节点因为度的基数大,被选中的概率也会大,后加进来的只有零星的几个再次被选中(编号24以后的那些不止有一条边的节点),说明这个建模是成功的。
小世界网络写完整后运行不出结果,有空继续debug吧。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









