






一:功能介绍
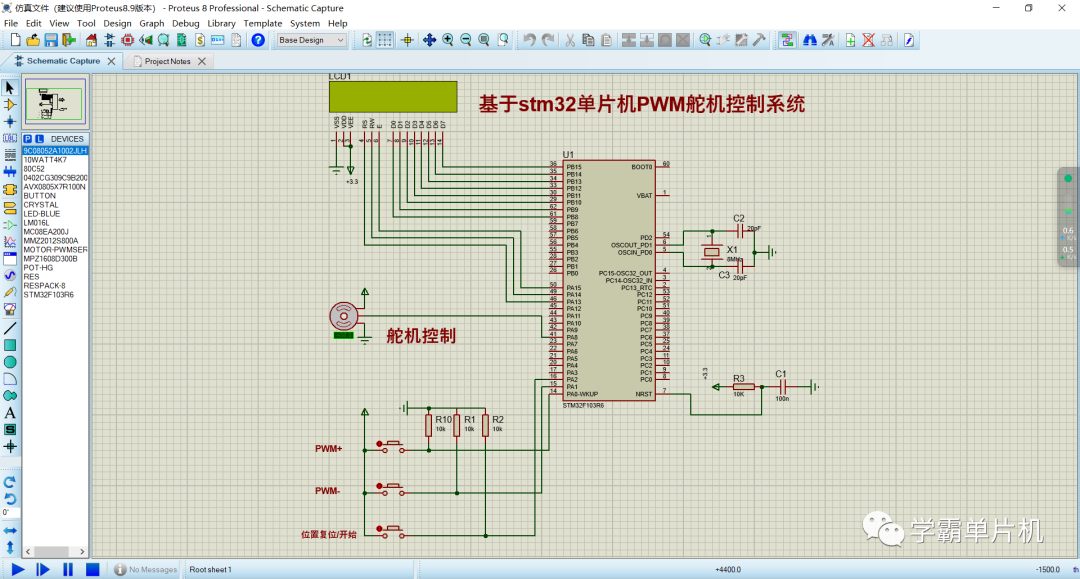
1、采用stm32单片机+LCD1602+舵机+按键组成,制作一个单片机PWM舵机控制系统;
2、可以通过按键设置PWM+和PWM-,来改变舵机的转向角度;通过按键可以将舵机恢复成开始位置;
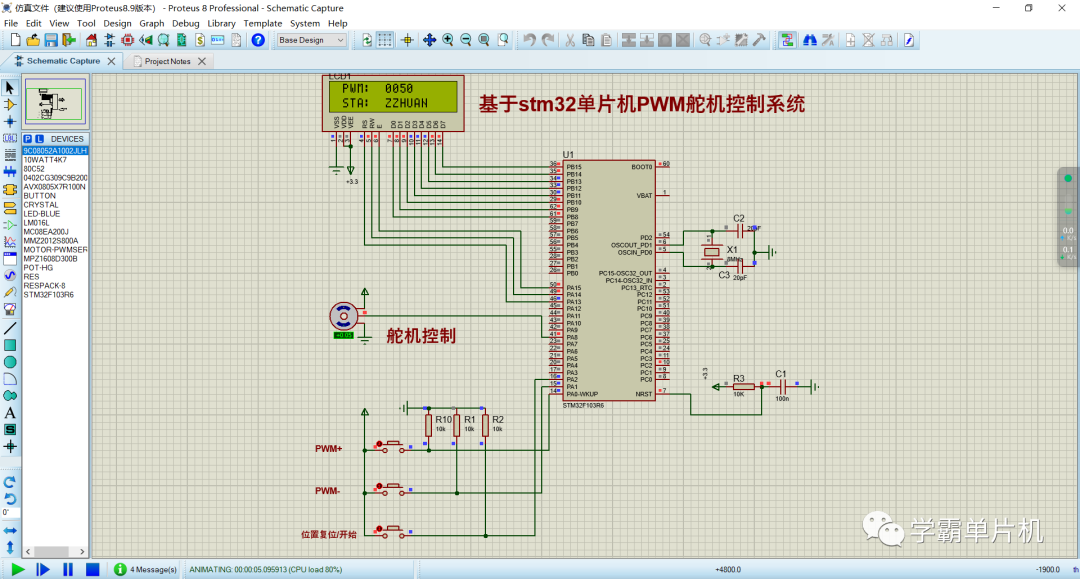
3、LCD1602可以显示PWM的值和当前舵机的方向状态;
二:仿真演示视频+程序简要讲解:(程序有中文注释,新手容易看懂)
99-基于stm32单片机PWM舵机控制系统Proteus仿真+程序源码+讲解视频
三:设计软件介绍
本设计使用C语言编程设计,程序代码采用keil5编写,程序有中文注释,新手容易看懂,仿真采用Proteus软件进行仿真,演示视频使用的是Proteus8.9版本;资料包里有相关软件包,可自行下载安装。
四:程序打开方法
特别注意:下载资料包以后一定要先解压!!!(建议解压到桌面上,文件路径太深会导致程序打开异常),解压后再用keil5打开。
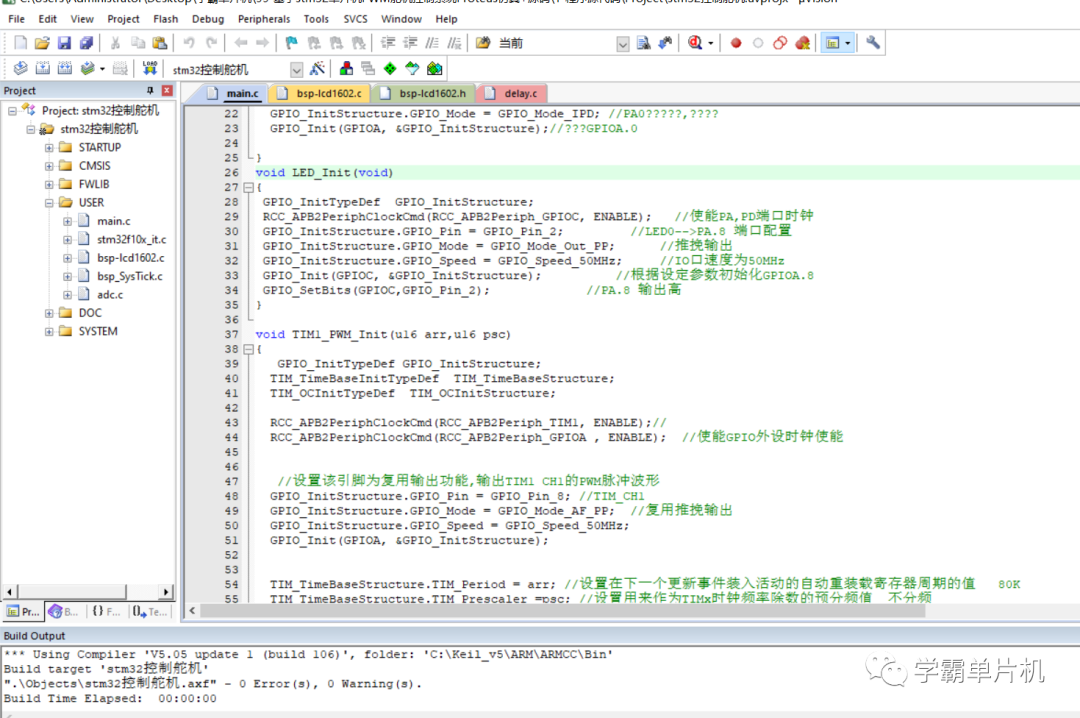
程序部分展示,有中文注释,新手容易看懂
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能
TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
/*****************引脚配置********************/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOA,ENABLE);
//LCD1602 管脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8| GPIO_Pin_9| GPIO_Pin_10| GPIO_Pin_11| GPIO_Pin_12| GPIO_Pin_13| GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15 |GPIO_Pin_14|GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
int main(void)
{
int buf=0;//输出状态值
int buf1=0;
delay_init(); //延时函数初始化
LED_Init();
KEY_Init();
TIM1_PWM_Init(1999,72);//不分频。PWM频率=72000/(899+1)=80Khz
TIM_SetCompare1(TIM1,buf);
GPIO_Configuration();
Init1602();
WrByte1602(0,0,' '); //输出值
WrByte1602(0,1,'P');
WrByte1602(0,2,'W');
WrByte1602(0,3,'M');
WrByte1602(0,4,':');
WrByte1602(1,0,' '); //状态
WrByte1602(1,1,'S');
WrByte1602(1,2,'T');
WrByte1602(1,3,'A');
WrByte1602(1,4,':');
WrByte1602(1,8,'Z');
WrByte1602(1,9,'H');
WrByte1602(1,10,'U');
WrByte1602(1,11,'A');
WrByte1602(1,12,'N');
while(1)
{
if(WK_UP==1)//加
{
buf++;if(buf>1096) buf=1096;
}
if(KEY0==1)//减
{
buf--;if(buf<109) buf=109;
}
if(KEY1==1)//复位/开始
{
buf=603;
}
TIM_SetCompare1(TIM1,buf);
buf1=(buf-109)*0.103;//TIM值转换为0-100更为直观
if(buf1>100) buf1=100;
WrByte1602(0,7,AsciiCode[buf1%10000/1000]); //显示PWM值
WrByte1602(0,8,AsciiCode[buf1%1000/100]);
WrByte1602(0,9,AsciiCode[buf1%100/10]);
WrByte1602(0,10,AsciiCode[buf1%10]);
if(buf<603)//显示状态
{
WrByte1602(1,7,'F');//反转
}
else
{
WrByte1602(1,7,'Z');//正转五:仿真文件(采用Proteus打开)

六:资料清单展示(文件中包含的相关资料)















 3031
3031











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









