







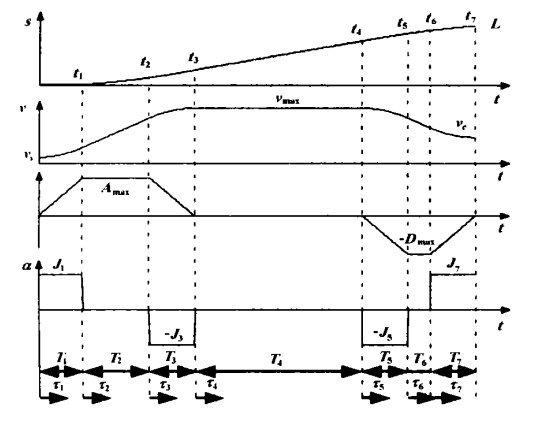
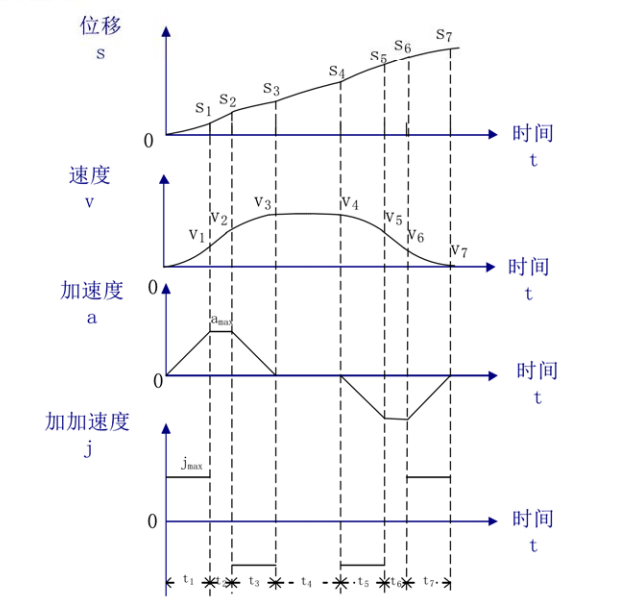
- 加加速段
加加速度为 jmax ,加速度线性增加至设定值或最大值 amax 。 - 匀加速段
加加速度为0,加速度恒定。 - 减加速段
当速度接近设定的值或最大值 vmax 时,加加速度突变为反向的 jmax ,进入加速度线性减小的变减速运动阶段。 - 匀速段
当速度增至 vmax 后,加加速和加速度均变为0,进入匀速运动阶段。 - 加减速段
加加速度突变为反向的 jmax ,加速度反向线性增加至 −amax 。 - 匀减速段
加加速度和为0,减加速度恒定。 - 减减速段
加速度突变为 jmax , 加速度由负向的 amax 线性减小至0。
- 加加速度、加速度、速度、位移随时间的变化函数:
tk(k=0,1,...7) :表示各个阶段的过渡点时刻;
τk(k=0,1,...7) :局部时间坐标,表示以各个阶段的起始点作为时间零点的时间表示, τk=tk−tk−1(k=1,...7) ;
Tk(k=1,...7) :各个阶段的持续运行时间。
j(t)=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪jmax0−jmax0−jmax0jmax0≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7
a(t)=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪jmaxτ1amaxamax−jmaxτ30−jmaxτ5−amax−amax+jmaxτ70≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7t=t1时,amax=jmaxT1
v(t)=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪vs+12jmaxτ21v1+amaxτ2v2+amaxτ3−12jmaxτ23v3v4−12jmaxτ25v5−amaxτ6v6−amaxτ7+12jmaxτ270≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7v1=vs+12jmaxT21v2=v1+amaxT2v3=v2+12jmaxT21v3=v4v5=v4−12jmaxT25v6=v5−amaxT6v7=v6−12jmaxT25
S(t)=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪vsτ1+16jmaxτ31S1+v1τ2+12jmaxT1τ22S2+v2τ3+12jmaxT1τ23−16jmaxτ33S3+v3τ4S4+v4τ5−16jmaxτ35S5+v5τ6−12jmaxT5τ26S6+v6τ7−12jmaxT5τ27+16jmaxτ370≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7t=t1时,S1=vsT1+16jmaxT31t=t2时,S2=S1+v1T2+12jmaxT1T22t=t3时,S3=S2+v2T1+13jmaxT31t=t4时,S4=S3+v3T4t=t5时,S5=S4+v4T5−16jmaxT35t=t6时,S6=S5+v5T6−12jmaxT5T26t=t7时,S7=S6+v6T5−13jmaxT35 几条关键中间计算公式推导
T1=T3,T5=T7
T2=vmax−vsamax−T1
T6=vmax−veamax−T5
当系统可以达到最大加速度时,有 T1=T3=T5=T7 。若此时有 vs=ve 时,则⎧⎩⎨T2=T6jmaxT1=jmaxT5=amaxv3=v4=vmax=vs+jmaxT1T2+jmaxT21
v7=vs+jmaxT1(T1+T2)−jmaxT5(T5+T6)=ve
加速区长度 Sa=vs(2T1+T2)+12jmaxT1(2T21+3T1T2+T22)
减速区长度 Sd=v3(2T5+T6)−12jmaxT5(2T25+3T5T6+T26)
规划路径的长度 S7=Sa+vmaxT4+Sd规划
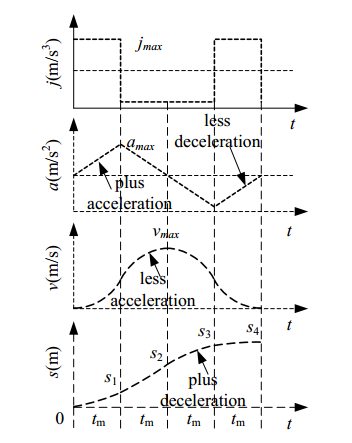
系统的最大加加速度为J,进给速度为F,最大加速度为 Amax ,并且 vs=ve 。当系统刚好能够达到最大加速度 Amax ,且无匀加减速和匀速段
T2=T6=T4=0
T1=T3=T5=T7
T1=AmaxJ
vmax=v3=vs+jmaxT21
系统的规划路径长度
Sref=S7=2vsT1+jmaxT31+2v3T5−jmaxT35=2vsT1+2v3T5 。当 L<Sref,F>vmax ,L的长度不足以系统增大至最大加速度 Amax 。加速区和减速区各为 L 的一半。
Sa=JT31+2vsT1=L2 ,解方程得
a=LJ−−√4
b=L2J16+8v3s27−−−−−−−−−−√
T1=a+b−−−−√3+a−b−−−−√3J−−√
vmax=JT21+vs当 L<Sref,F<vmax ,此时有匀速段。
T1=F−vsJ−−−−−−√
Sa=JT31+2vsT1
T4=L−2SaF当 L>Sref,F<vmax ,此种情形与上同。
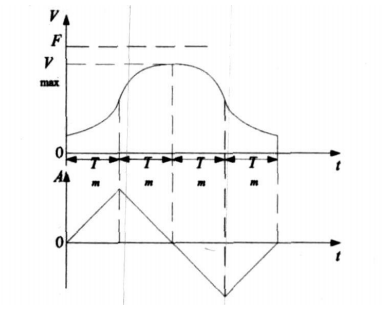
- 当
L>Sref,F>vmax
,L足够长以致
amax
有足够的时间来增大至
Amax
,并且
vmax
没有超过进给速度
F
,此时必定产生匀加减速段,假设
vmax 刚好增大至 F 。
T5=T1=AmaxJ
T2=F−vsAmax−T1
T6=F−veAmax−T5
S′ref=F+vs2(2T1+T2)+F+ve2(2T5+T6)
若 L<S′ref , L 不够长以致vmax 无法增大至 F ,重新规划,匀加减速段减小。解方程组,带入化简得⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪T5=T1=AmaxJT2=vmax−vsAmax−T1T6=vmax−veAmax−T5L=vmax+vs2(2T1+T2)+vmax+ve2(2T5+T6)
2Jv2max+2A2maxvmax+A2max(vs+ve)−J(v2s+v2e)−2JAmaxL=0
vmax=−A2max2J+A4max−2J[A2max(vs+ve)−J(v2s+v2e)−2AmaxJL]−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−√2J。
解得 vmax 带入方程组求得 T2,T6 。
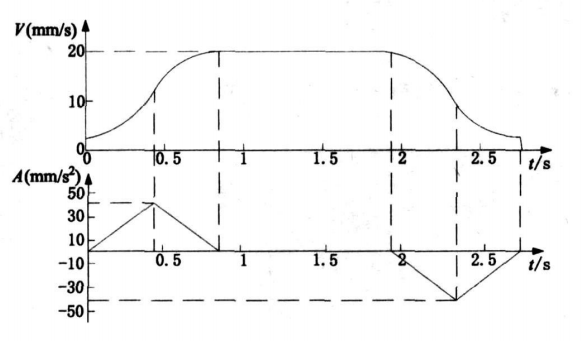
若 L>S′ref ,L足够长以致 vmax 能够增大至 F ,并且产生匀速段,此时有完整的7段S形曲线。
。T4=L−S′refvmax
基于LinuxCNC的机器人核心控制算法研究
数控系统S形曲线加减速快速规划研究
S曲线加减速算法研究
S曲线加减速控制新方法的研究
Motion Planning for Archwire Bending Robot in Orthodontic Treatments

















 367
367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









