






车道检测、自适应巡航控制和编队matlab simulink仿真建模模型
ID:8630672358957146
一無所有`
车道检测、自适应巡航控制和编队matlab simulink仿真建模模型是现代汽车技术领域非常重要的研究课题。随着自动驾驶技术的发展,车道检测、自适应巡航控制和编队技术成为实现车辆智能化的关键技术。本文将围绕这些关键技术展开讨论,从理论和实践两个方面进行分析。
首先,车道检测是自动驾驶系统中的基础功能之一。通过车道检测算法,车辆能够识别道路上的车道线,实时监测车辆相对于车道线的位置和姿态信息。这一技术的实现可以利用计算机视觉技术,例如使用摄像头采集道路图像,通过图像处理和特征提取算法识别车道线。同时,还可以结合传感器数据,如激光雷达和雷达传感器,提高车道检测的精度和鲁棒性。
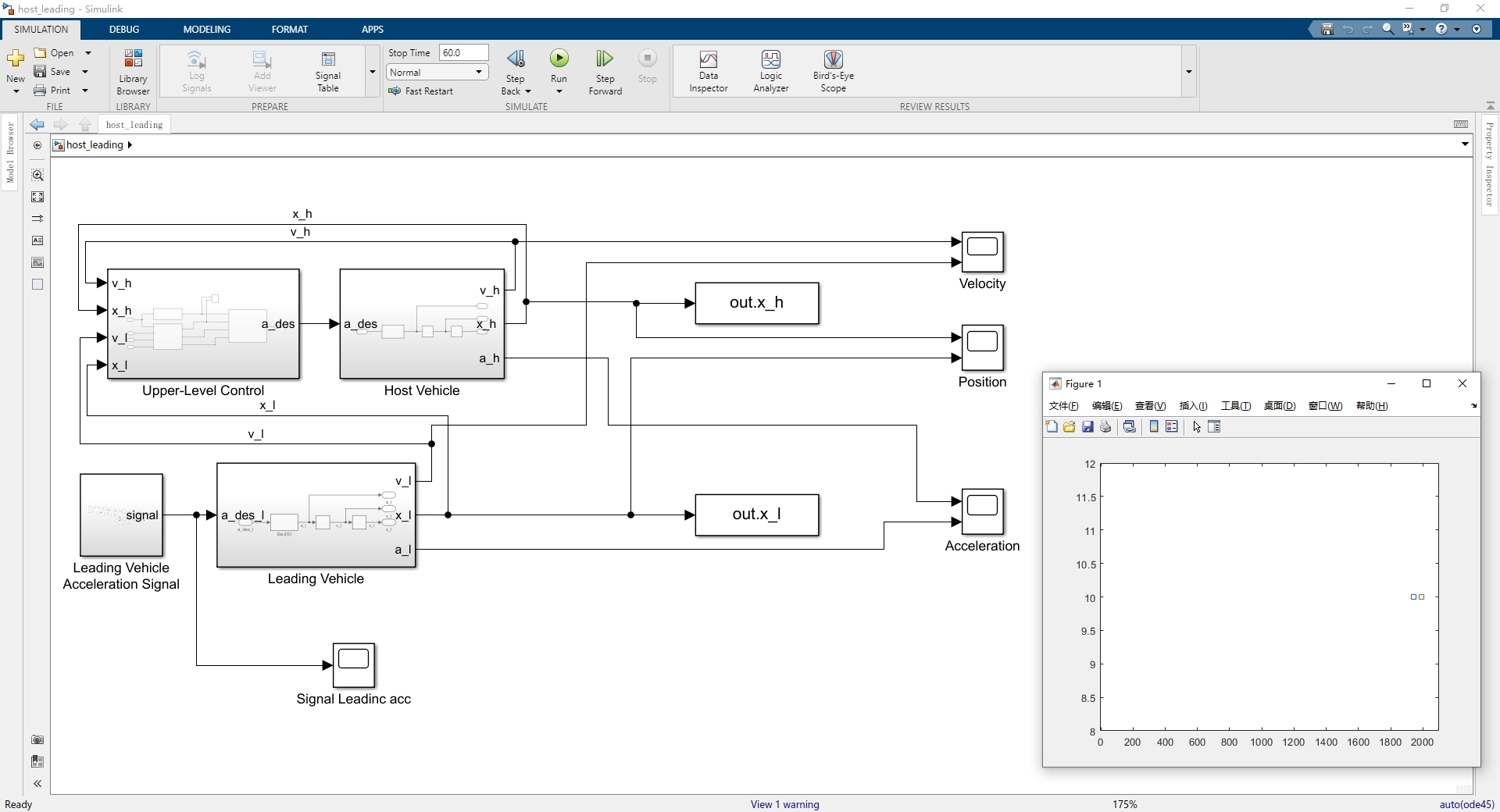
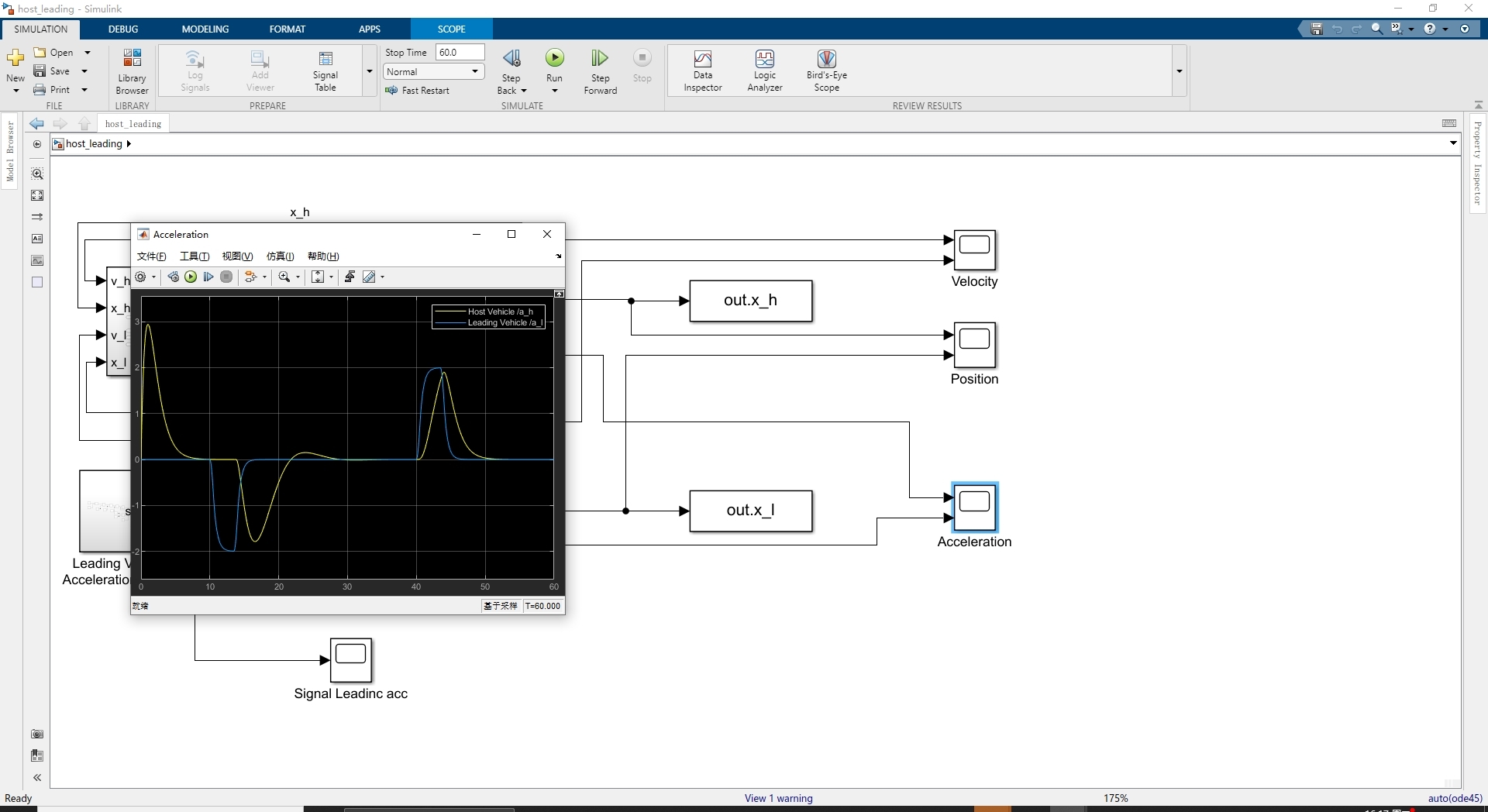
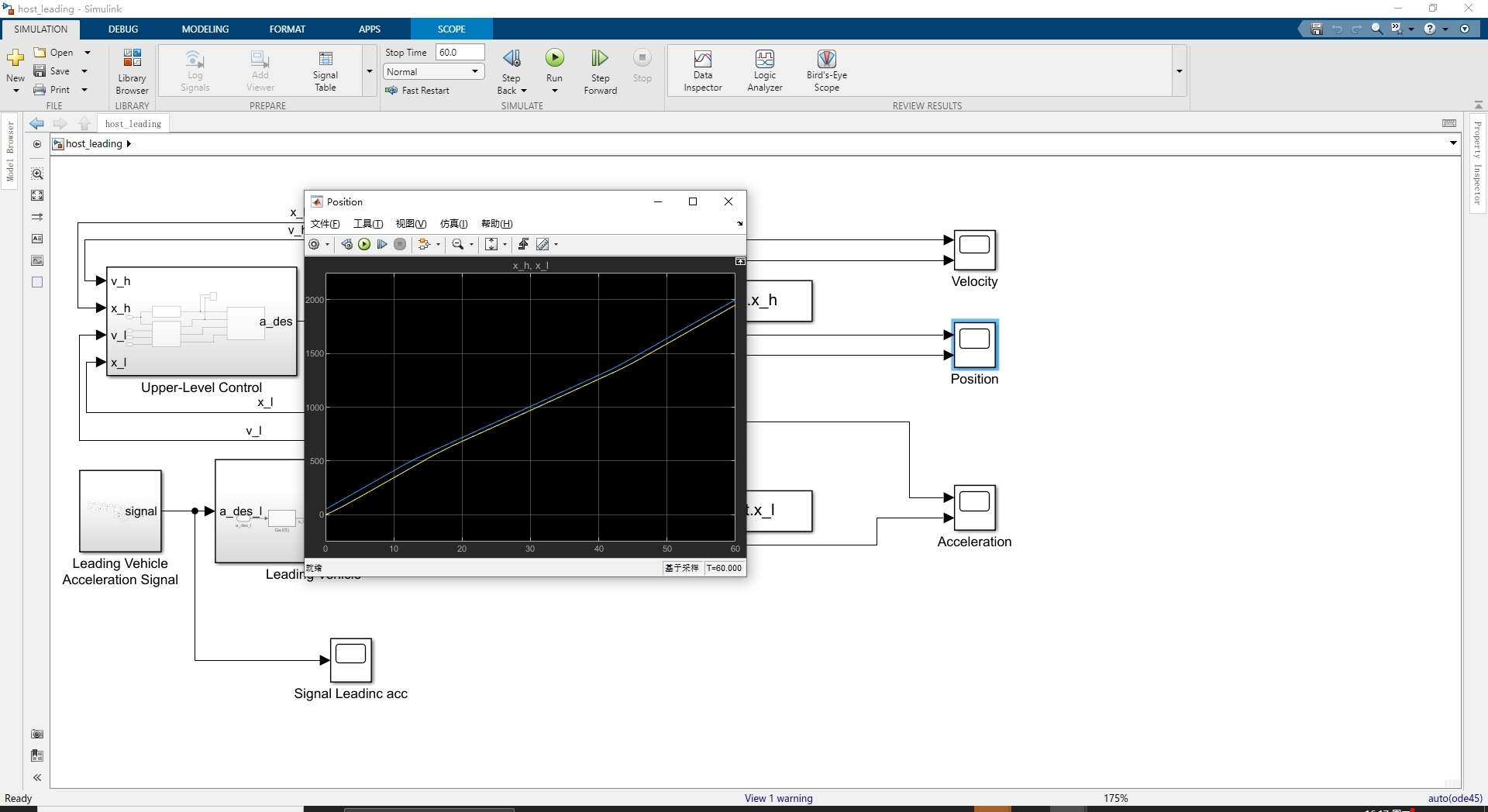
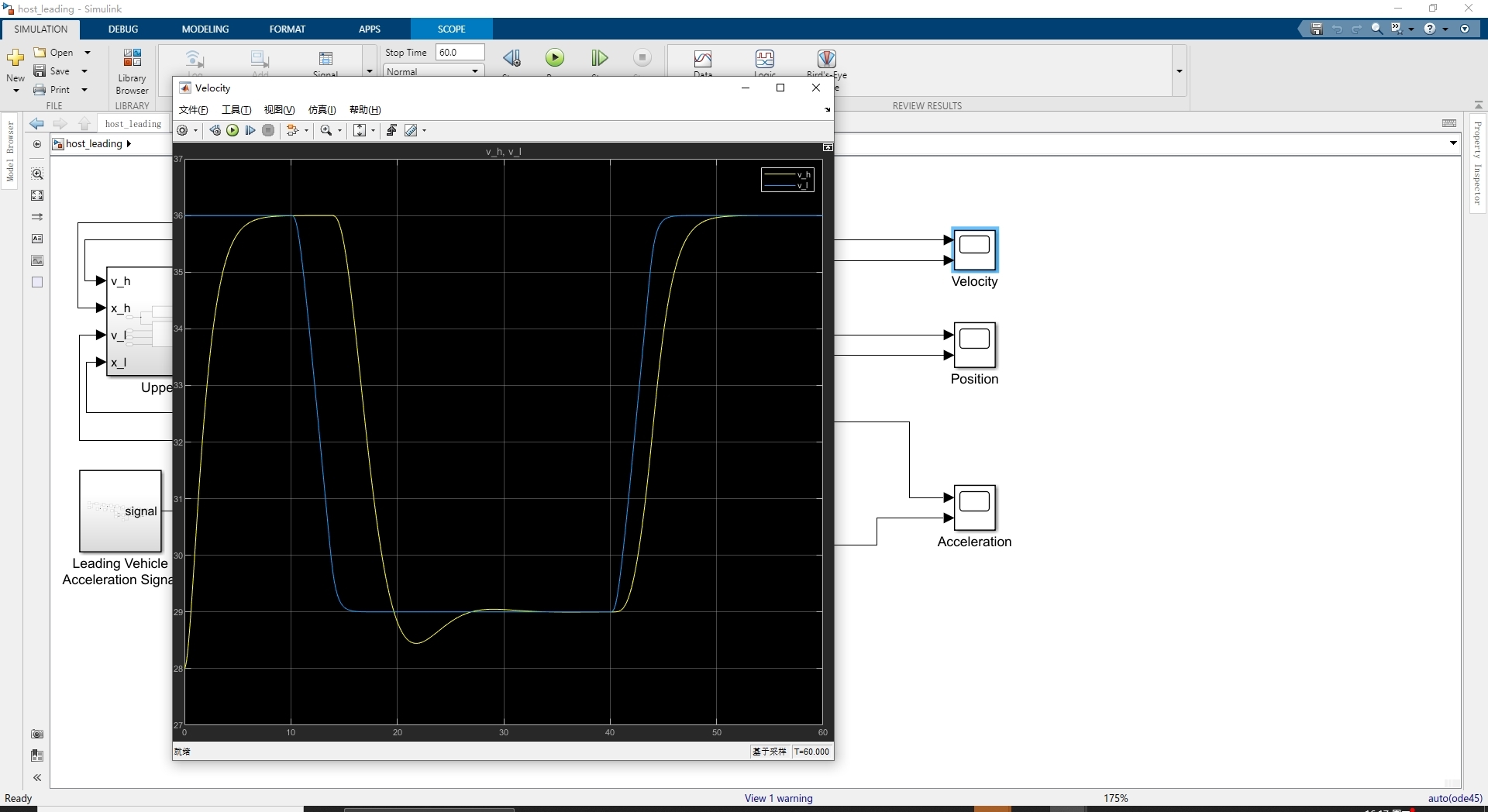
其次,自适应巡航控制是基于车辆感知和环境理解的自动驾驶技术。通过感知器件,如雷达和摄像头,自适应巡航控制系统可以实时获取车辆周围的交通环境信息,包括距离、速度和加速度等。根据这些信息,自适应巡航控制系统能够根据道路的交通情况,在保持安全跟随前车的前提下,自动调整车辆的速度和加速度。这一技术的实现可以基于模型预测控制(MPC)方法,利用matlab simulink仿真建模模型进行系统设计和性能评估。
最后,编队技术是实现车辆自动驾驶协同行驶的关键技术。通过编队技术,车辆能够实现距离和方向的协同控制,形成一个紧密的车辆编队。这一技术的实现可以基于无线通信和传感器融合技术,通过互相交换位置、速度和加速度等信息,在保持车辆之间的安全距离和速度一致性的同时,实现车辆的协同行驶。编队技术的成功应用将大大提高道路的通行效率和交通安全性。
综上所述,车道检测、自适应巡航控制和编队技术是实现车辆智能化的关键技术。通过对这些技术的理论分析和实践研究,可以进一步提升车辆的安全性、舒适性和通行效率。随着自动驾驶技术的不断发展,这些关键技术将逐渐成熟并得到广泛应用。相信在不久的将来,我们将迎来一个真正智能化和自主化的驾驶时代。
相关的代码,程序地址如下:http://wekup.cn/672358957146.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









