







简述
I2c是一个应用很广的总线。通讯协议简单,而且一条总线上可以挂载多个设备,在这里讲一下I2c在linux中的架构。首先借一下网络上的一张图:
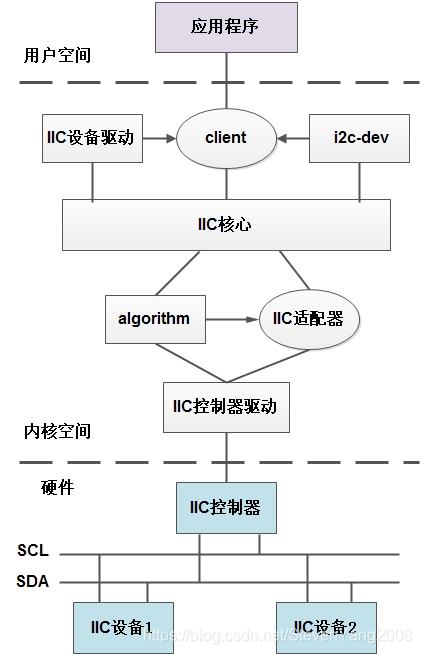
I2c的框架主要分为以上这么几个部分。下面根据代码,相机讲述一下,各个部分的实现。
软件版本:linux 4.14.98
硬件型号:imx7
1. I2C-imx 控制器驱动
文件:drivers/i2c/busses/i2c-imx.c
static const struct dev_pm_ops i2c_imx_pm_ops = {
SET_NOIRQ_SYSTEM_SLEEP_PM_OPS(i2c_imx_suspend, i2c_imx_resume)
SET_RUNTIME_PM_OPS(i2c_imx_runtime_suspend,
i2c_imx_runtime_resume, NULL)
};
#define I2C_IMX_PM_OPS (&i2c_imx_pm_ops)
#else
#define I2C_IMX_PM_OPS NULL
#endif /* CONFIG_PM */
static struct platform_driver i2c_imx_driver = {
.probe = i2c_imx_probe,
.remove = i2c_imx_remove,
.driver = {
.name = DRIVER_NAME,
.pm = I2C_IMX_PM_OPS,
.of_match_table = i2c_imx_dt_ids,
},
.id_table = imx_i2c_devtype,
};
static int __init i2c_adap_imx_init(void)
{
return platform_driver_register(&i2c_imx_driver);
}
subsys_initcall(i2c_adap_imx_init);
static void __exit i2c_adap_imx_exit(void)
{
platform_driver_unregister(&i2c_imx_driver);
}
module_exit(i2c_adap_imx_exit);
其中i2c_imx_dt_ids定义如下:
static const struct of_device_id i2c_imx_dt_ids[] = {
{ .compatible = "fsl,imx1-i2c", .data = &imx1_i2c_hwdata, },
{ .compatible = "fsl,imx21-i2c", .data = &imx21_i2c_hwdata, },
{ .compatible = "fsl,vf610-i2c", .data = &vf610_i2c_hwdata, },
{ .compatible = "fsl,imx7d-i2c", .data = &imx7d_i2c_hwdata, },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, i2c_imx_dt_ids);
下面看下probe函数
static int i2c_imx_probe(struct platform_device *pdev)
{
const struct of_device_id *of_id = of_match_device(i2c_imx_dt_ids,
&pdev->dev);
struct imx_i2c_struct *i2c_imx;
struct resource *res;
struct imxi2c_platform_data *pdata = dev_get_platdata(&pdev->dev);
void __iomem *base;
int irq, ret;
dma_addr_t phy_addr;
dev_dbg(&pdev->dev, "<%s>\n", __func__);
irq = platform_get_irq(pdev, 0);
if (irq < 0) {
dev_err(&pdev->dev, "can't get irq number\n");
return irq;
}
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(base))
return PTR_ERR(base);
phy_addr = (dma_addr_t)res->start;
i2c_imx = devm_kzalloc(&pdev->dev, sizeof(*i2c_imx), GFP_KERNEL);
if (!i2c_imx)
return -ENOMEM;
if (of_id)
i2c_imx->hwdata = of_id->data;
else
i2c_imx->hwdata = (struct imx_i2c_hwdata *)
platform_get_device_id(pdev)->driver_data;
/* Setup i2c_imx driver structure */
strlcpy(i2c_imx->adapter.name, pdev->name, sizeof(i2c_imx->adapter.name));
i2c_imx->adapter.owner = THIS_MODULE;
i2c_imx->adapter.algo = &i2c_imx_algo;
i2c_imx->adapter.dev.parent = &pdev->dev;
i2c_imx->adapter.nr = pdev->id;
i2c_imx->adapter.dev.of_node = pdev->dev.of_node;
i2c_imx->base = base;
/* Get I2C clock */
i2c_imx->clk = devm_clk_get(&pdev->dev, NULL);
if (IS_ERR(i2c_imx->clk)) {
dev_err(&pdev->dev, "can't get I2C clock\n");
return PTR_ERR(i2c_imx->clk);
}
ret = clk_prepare_enable(i2c_imx->clk);
if (ret) {
dev_err(&pdev->dev, "can't enable I2C clock, ret=%d\n", ret);
return ret;
}
/* Request IRQ */
ret = devm_request_irq(&pdev->dev, irq, i2c_imx_isr,
IRQF_SHARED | IRQF_NO_SUSPEND,
pdev->name, i2c_imx);
if (ret) {
dev_err(&pdev->dev, "can't claim irq %d\n", irq);
goto clk_disable;
}
/* Init queue */
init_waitqueue_head(&i2c_imx->queue);
/* Set up adapter data */
i2c_set_adapdata(&i2c_imx->adapter, i2c_imx);
/* Set up platform driver data */
platform_set_drvdata(pdev, i2c_imx);
pm_runtime_set_autosuspend_delay(&pdev->dev, I2C_PM_TIMEOUT);
pm_runtime_use_autosuspend(&pdev->dev);
pm_runtime_set_active(&pdev->dev);
pm_runtime_enable(&pdev->dev);
ret = pm_runtime_get_sync(&pdev->dev);
if (ret < 0)
goto rpm_disable;
/* Set up clock divider */
i2c_imx->bitrate = IMX_I2C_BIT_RATE;
ret = of_property_read_u32(pdev->dev.of_node,
"clock-frequency", &i2c_imx->bitrate);
if (ret < 0 && pdata && pdata->bitrate)
i2c_imx->bitrate = pdata->bitrate;
/*
* This limit caused by an i.MX7D hardware issue(e7805 in Errata).
* If there is no limit, when the bitrate set up to 400KHz, it will
* cause the SCK low level period less than 1.3us.
*/
if (is_imx7d_i2c(i2c_imx) && i2c_imx->bitrate > IMX_I2C_MAX_E_BIT_RATE)
i2c_imx->bitrate = IMX_I2C_MAX_E_BIT_RATE;
/* Set up chip registers to defaults */
imx_i2c_write_reg(i2c_imx->hwdata->i2cr_ien_opcode ^ I2CR_IEN,
i2c_imx, IMX_I2C_I2CR);
imx_i2c_write_reg(i2c_imx->hwdata->i2sr_clr_opcode, i2c_imx, IMX_I2C_I2SR);
/* Init optional bus recovery function */
ret = i2c_imx_init_recovery_info(i2c_imx, pdev);
/* Give it another chance if pinctrl used is not ready yet */
if (ret == -EPROBE_DEFER)
goto rpm_disable;
/* Add I2C adapter */
ret = i2c_add_numbered_adapter(&i2c_imx->adapter);
if (ret < 0)
goto rpm_disable;
pm_runtime_mark_last_busy(&pdev->dev);
pm_runtime_put_autosuspend(&pdev->dev);
dev_dbg(&i2c_imx->adapter.dev, "claimed irq %d\n", irq);
dev_dbg(&i2c_imx->adapter.dev, "device resources: %pR\n", res);
dev_dbg(&i2c_imx->adapter.dev, "adapter name: \"%s\"\n",
i2c_imx->adapter.name);
dev_info(&i2c_imx->adapter.dev, "IMX I2C adapter registered\n");
/* Init DMA config if supported */
i2c_imx_dma_request(i2c_imx, phy_addr);
return 0; /* Return OK */
rpm_disable:
pm_runtime_put_noidle(&pdev->dev);
pm_runtime_disable(&pdev->dev);
pm_runtime_set_suspended(&pdev->dev);
pm_runtime_dont_use_autosuspend(&pdev->dev);
clk_disable:
clk_disable_unprepare(i2c_imx->clk);
return ret;
}
在这个函数里面重点是 ret = i2c_add_numbered_adapter(&i2c_imx->adapter),注册I2C适配器和I2C设备都在里面实现。这个函数是在i2c core中实现。待会儿我们讲解。在i2c控制器驱动这边主要的是i2c_algorithm和irq的实现。i2c_algorithm定义如下
static const struct i2c_algorithm i2c_imx_algo = {
.master_xfer = i2c_imx_xfer,
.functionality = i2c_imx_func,
};
static u32 i2c_imx_func(struct i2c_adapter *adapter)
{
return I2C_FUNC_I2C | I2C_FUNC_SMBUS_EMUL
| I2C_FUNC_SMBUS_READ_BLOCK_DATA;
}
..............................................................
..............................................................
..............................................................
static int i2c_imx_xfer(struct i2c_adapter *adapter,
struct i2c_msg *msgs, int num)
{
unsigned int i, temp;
int result;
bool is_lastmsg = false;
bool enable_runtime_pm = false;
struct imx_i2c_struct *i2c_imx = i2c_get_adapdata(adapter);
dev_dbg(&i2c_imx->adapter.dev, "<%s>\n", __func__);
if (!pm_runtime_enabled(i2c_imx->adapter.dev.parent)) {
pm_runtime_enable(i2c_imx->adapter.dev.parent);
enable_runtime_pm = true;
}
result = pm_runtime_get_sync(i2c_imx->adapter.dev.parent);
if (result < 0)
goto out;
/* Start I2C transfer */
result = i2c_imx_start(i2c_imx);
if (result) {
if (i2c_imx->adapter.bus_recovery_info) {
i2c_recover_bus(&i2c_imx->adapter);
result = i2c_imx_start(i2c_imx);
}
}
if (result)
goto fail0;
/* read/write data */
for (i = 0; i < num; i++) {
if (i == num - 1)
is_lastmsg = true;
if (i) {
dev_dbg(&i2c_imx->adapter.dev,
"<%s> repeated start\n", __func__);
temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2CR);
temp |= I2CR_RSTA;
imx_i2c_write_reg(temp, i2c_imx, IMX_I2C_I2CR);
result = i2c_imx_bus_busy(i2c_imx, 1);
if (result)
goto fail0;
}
dev_dbg(&i2c_imx->adapter.dev,
"<%s> transfer message: %d\n", __func__, i);
/* write/read data */
#ifdef CONFIG_I2C_DEBUG_BUS
temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2CR);
dev_dbg(&i2c_imx->adapter.dev,
"<%s> CONTROL: IEN=%d, IIEN=%d, MSTA=%d, MTX=%d, TXAK=%d, RSTA=%d\n",
__func__,
(temp & I2CR_IEN ? 1 : 0), (temp & I2CR_IIEN ? 1 : 0),
(temp & I2CR_MSTA ? 1 : 0), (temp & I2CR_MTX ? 1 : 0),
(temp & I2CR_TXAK ? 1 : 0), (temp & I2CR_RSTA ? 1 : 0));
temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2SR);
dev_dbg(&i2c_imx->adapter.dev,
"<%s> STATUS: ICF=%d, IAAS=%d, IBB=%d, IAL=%d, SRW=%d, IIF=%d, RXAK=%d\n",
__func__,
(temp & I2SR_ICF ? 1 : 0), (temp & I2SR_IAAS ? 1 : 0),
(temp & I2SR_IBB ? 1 : 0), (temp & I2SR_IAL ? 1 : 0),
(temp & I2SR_SRW ? 1 : 0), (temp & I2SR_IIF ? 1 : 0),
(temp & I2SR_RXAK ? 1 : 0));
#endif
if (msgs[i].flags & I2C_M_RD)
result = i2c_imx_read(i2c_imx, &msgs[i], is_lastmsg);
else {
if (i2c_imx->dma && msgs[i].len >= DMA_THRESHOLD)
result = i2c_imx_dma_write(i2c_imx, &msgs[i]);
else
result = i2c_imx_write(i2c_imx, &msgs[i]);
}
if (result)
goto fail0;
}
fail0:
/* Stop I2C transfer */
i2c_imx_stop(i2c_imx);
pm_runtime_mark_last_busy(i2c_imx->adapter.dev.parent);
pm_runtime_put_autosuspend(i2c_imx->adapter.dev.parent);
out:
if (enable_runtime_pm)
pm_runtime_disable(i2c_imx->adapter.dev.parent);
dev_dbg(&i2c_imx->adapter.dev, "<%s> exit with: %s: %d\n", __func__,
(result < 0) ? "error" : "success msg",
(result < 0) ? result : num);
return (result < 0) ? result : num;
}
i2c中断申请如下。
devm_request_irq(&pdev->dev, irq, i2c_imx_isr,
IRQF_SHARED | IRQF_NO_SUSPEND,
pdev->name, i2c_imx);
devm_request_irq()函数如下:
devm_request_irq(struct device *dev, unsigned int irq, irq_handler_t handler,
unsigned long irqflags, const char *devname, void *dev_id)
{
return devm_request_threaded_irq(dev, irq, handler, NULL, irqflags,
devname, dev_id);
}
.........................................
..........................................
/**
* devm_request_threaded_irq - allocate an interrupt line for a managed device
* @dev: device to request interrupt for
* @irq: Interrupt line to allocate
* @handler: Function to be called when the IRQ occurs
* @thread_fn: function to be called in a threaded interrupt context. NULL
* for devices which handle everything in @handler
* @irqflags: Interrupt type flags
* @devname: An ascii name for the claiming device, dev_name(dev) if NULL
* @dev_id: A cookie passed back to the handler function
*
* Except for the extra @dev argument, this function takes the
* same arguments and performs the same function as
* request_threaded_irq(). IRQs requested with this function will be
* automatically freed on driver detach.
*
* If an IRQ allocated with this function needs to be freed
* separately, devm_free_irq() must be used.
*/
int devm_request_threaded_irq(struct device *dev, unsigned int irq,
irq_handler_t handler, irq_handler_t thread_fn,
unsigned long irqflags, const char *devname,
void *dev_id)
{
struct irq_devres *dr;
int rc;
dr = devres_alloc(devm_irq_release, sizeof(struct irq_devres),
GFP_KERNEL);
if (!dr)
return -ENOMEM;
if (!devname)
devname = dev_name(dev);
rc = request_threaded_irq(irq, handler, thread_fn, irqflags, devname,
dev_id);
if (rc) {
devres_free(dr);
return rc;
}
dr->irq = irq;
dr->dev_id = dev_id;
devres_add(dev, dr);
return 0;
}
EXPORT_SYMBOL(devm_request_threaded_irq);
接下来我们到i2c core 层来看看。
2. I2C core
文件位置:drivers/i2c/i2c-core-base.c
首先来看i2c_init()函数。
static int __init i2c_init(void)
{
int retval;
retval = of_alias_get_highest_id("i2c");
down_write(&__i2c_board_lock);
if (retval >= __i2c_first_dynamic_bus_num)
__i2c_first_dynamic_bus_num = retval + 1;
up_write(&__i2c_board_lock);
retval = bus_register(&i2c_bus_type);
if (retval)
return retval;
is_registered = true;
#ifdef CONFIG_I2C_COMPAT
i2c_adapter_compat_class = class_compat_register("i2c-adapter");
if (!i2c_adapter_compat_class) {
retval = -ENOMEM;
goto bus_err;
}
#endif
retval = i2c_add_driver(&dummy_driver);
if (retval)
goto class_err;
if (IS_ENABLED(CONFIG_OF_DYNAMIC))
WARN_ON(of_reconfig_notifier_register(&i2c_of_notifier));
if (IS_ENABLED(CONFIG_ACPI))
WARN_ON(acpi_reconfig_notifier_register(&i2c_acpi_notifier));
return 0;
class_err:
#ifdef CONFIG_I2C_COMPAT
class_compat_unregister(i2c_adapter_compat_class);
bus_err:
#endif
is_registered = false;
bus_unregister(&i2c_bus_type);
return retval;
}
在该函数中利用 bus_register(&i2c_bus_type)向系统注册I2c总线。
其中i2c_bus_type定义如下:
struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
};
EXPORT_SYMBOL_GPL(i2c_bus_type);
在这里我们看一下i2c_device_probe()函数:
static int i2c_device_probe(struct device *dev)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
int status;
if (!client)
return 0;
driver = to_i2c_driver(dev->driver);
if (!client->irq && !driver->disable_i2c_core_irq_mapping) {
int irq = -ENOENT;
if (client->flags & I2C_CLIENT_HOST_NOTIFY) {
dev_dbg(dev, "Using Host Notify IRQ\n");
irq = i2c_smbus_host_notify_to_irq(client);
} else if (dev->of_node) {
irq = of_irq_get_byname(dev->of_node, "irq");
if (irq == -EINVAL || irq == -ENODATA)
irq = of_irq_get(dev->of_node, 0);
} else if (ACPI_COMPANION(dev)) {
irq = acpi_dev_gpio_irq_get(ACPI_COMPANION(dev), 0);
}
if (irq == -EPROBE_DEFER)
return irq;
if (irq < 0)
irq = 0;
client->irq = irq;
}
/*
* An I2C ID table is not mandatory, if and only if, a suitable OF
* or ACPI ID table is supplied for the probing device.
*/
if (!driver->id_table &&
!i2c_acpi_match_device(dev->driver->acpi_match_table, client) &&
!i2c_of_match_device(dev->driver->of_match_table, client))
return -ENODEV;
if (client->flags & I2C_CLIENT_WAKE) {
int wakeirq = -ENOENT;
if (dev->of_node) {
wakeirq = of_irq_get_byname(dev->of_node, "wakeup");
if (wakeirq == -EPROBE_DEFER)
return wakeirq;
}
device_init_wakeup(&client->dev, true);
if (wakeirq > 0 && wakeirq != client->irq)
status = dev_pm_set_dedicated_wake_irq(dev, wakeirq);
else if (client->irq > 0)
status = dev_pm_set_wake_irq(dev, client->irq);
else
status = 0;
if (status)
dev_warn(&client->dev, "failed to set up wakeup irq\n");
}
dev_dbg(dev, "probe\n");
status = of_clk_set_defaults(dev->of_node, false);
if (status < 0)
goto err_clear_wakeup_irq;
status = dev_pm_domain_attach(&client->dev, true);
if (status == -EPROBE_DEFER)
goto err_clear_wakeup_irq;
/*
* When there are no more users of probe(),
* rename probe_new to probe.
*/
if (driver->probe_new)
status = driver->probe_new(client);
else if (driver->probe)
status = driver->probe(client,
i2c_match_id(driver->id_table, client));
else
status = -EINVAL;
if (status)
goto err_detach_pm_domain;
return 0;
err_detach_pm_domain:
dev_pm_domain_detach(&client->dev, true);
err_clear_wakeup_irq:
dev_pm_clear_wake_irq(&client->dev);
device_init_wakeup(&client->dev, false);
return status;
}
如果在driver中初始化了probe,那么就使用driver中定义的probe.,就是上一节中的probe函数。
下面我们看一下上一节中提到的 i2c_add_numbered_adapter(&i2c_imx->adapter),这个函数实现:
/**
* i2c_add_numbered_adapter - declare i2c adapter, use static bus number
* @adap: the adapter to register (with adap->nr initialized)
* Context: can sleep
*
* This routine is used to declare an I2C adapter when its bus number
* matters. For example, use it for I2C adapters from system-on-chip CPUs,
* or otherwise built in to the system's mainboard, and where i2c_board_info
* is used to properly configure I2C devices.
*
* If the requested bus number is set to -1, then this function will behave
* identically to i2c_add_adapter, and will dynamically assign a bus number.
*
* If no devices have pre-been declared for this bus, then be sure to
* register the adapter before any dynamically allocated ones. Otherwise
* the required bus ID may not be available.
*
* When this returns zero, the specified adapter became available for
* clients using the bus number provided in adap->nr. Also, the table
* of I2C devices pre-declared using i2c_register_board_info() is scanned,
* and the appropriate driver model device nodes are created. Otherwise, a
* negative errno value is returned.
*/
int i2c_add_numbered_adapter(struct i2c_adapter *adap)
{
if (adap->nr == -1) /* -1 means dynamically assign bus id */
return i2c_add_adapter(adap);
return __i2c_add_numbered_adapter(adap);
}
EXPORT_SYMBOL_GPL(i2c_add_numbered_adapter);
......................................
/**
* __i2c_add_numbered_adapter - i2c_add_numbered_adapter where nr is never -1
* @adap: the adapter to register (with adap->nr initialized)
* Context: can sleep
*
* See i2c_add_numbered_adapter() for details.
*/
static int __i2c_add_numbered_adapter(struct i2c_adapter *adap)
{
int id;
mutex_lock(&core_lock);
id = idr_alloc(&i2c_adapter_idr, adap, adap->nr, adap->nr + 1, GFP_KERNEL);
mutex_unlock(&core_lock);
if (WARN(id < 0, "couldn't get idr"))
return id == -ENOSPC ? -EBUSY : id;
return i2c_register_adapter(adap);
}
..............................................
/**
* i2c_add_adapter - declare i2c adapter, use dynamic bus number
* @adapter: the adapter to add
* Context: can sleep
*
* This routine is used to declare an I2C adapter when its bus number
* doesn't matter or when its bus number is specified by an dt alias.
* Examples of bases when the bus number doesn't matter: I2C adapters
* dynamically added by USB links or PCI plugin cards.
*
* When this returns zero, a new bus number was allocated and stored
* in adap->nr, and the specified adapter became available for clients.
* Otherwise, a negative errno value is returned.
*/
int i2c_add_adapter(struct i2c_adapter *adapter)
{
struct device *dev = &adapter->dev;
int id;
if (dev->of_node) {
id = of_alias_get_id(dev->of_node, "i2c");
if (id >= 0) {
adapter->nr = id;
return __i2c_add_numbered_adapter(adapter);
}
}
mutex_lock(&core_lock);
id = idr_alloc(&i2c_adapter_idr, adapter,
__i2c_first_dynamic_bus_num, 0, GFP_KERNEL);
mutex_unlock(&core_lock);
if (WARN(id < 0, "couldn't get idr"))
return id;
adapter->nr = id;
return i2c_register_adapter(adapter);
}
EXPORT_SYMBOL(i2c_add_adapter);
重点是i2c_register_adapter这个函数:
static int i2c_register_adapter(struct i2c_adapter *adap)
{
int res = -EINVAL;
/* Can't register until after driver model init */
if (WARN_ON(!is_registered)) {
res = -EAGAIN;
goto out_list;
}
/* Sanity checks */
if (WARN(!adap->name[0], "i2c adapter has no name"))
goto out_list;
if (!adap->algo) {
pr_err("adapter '%s': no algo supplied!\n", adap->name);
goto out_list;
}
if (!adap->lock_ops)
adap->lock_ops = &i2c_adapter_lock_ops;
rt_mutex_init(&adap->bus_lock);
rt_mutex_init(&adap->mux_lock);
mutex_init(&adap->userspace_clients_lock);
INIT_LIST_HEAD(&adap->userspace_clients);
/* Set default timeout to 1 second if not already set */
if (adap->timeout == 0)
adap->timeout = HZ;
/* register soft irqs for Host Notify */
res = i2c_setup_host_notify_irq_domain(adap);
if (res) {
pr_err("adapter '%s': can't create Host Notify IRQs (%d)\n",
adap->name, res);
goto out_list;
}
dev_set_name(&adap->dev, "i2c-%d", adap->nr);
adap->dev.bus = &i2c_bus_type;
adap->dev.type = &i2c_adapter_type;
res = device_register(&adap->dev);
if (res) {
pr_err("adapter '%s': can't register device (%d)\n", adap->name, res);
goto out_list;
}
dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
pm_runtime_no_callbacks(&adap->dev);
pm_suspend_ignore_children(&adap->dev, true);
pm_runtime_enable(&adap->dev);
#ifdef CONFIG_I2C_COMPAT
res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev,
adap->dev.parent);
if (res)
dev_warn(&adap->dev,
"Failed to create compatibility class link\n");
#endif
i2c_init_recovery(adap);
/* create pre-declared device nodes */
of_i2c_register_devices(adap);
i2c_acpi_register_devices(adap);
i2c_acpi_install_space_handler(adap);
if (adap->nr < __i2c_first_dynamic_bus_num)
i2c_scan_static_board_info(adap);
/* Notify drivers */
mutex_lock(&core_lock);
bus_for_each_drv(&i2c_bus_type, NULL, adap, __process_new_adapter);
mutex_unlock(&core_lock);
return 0;
out_list:
mutex_lock(&core_lock);
idr_remove(&i2c_adapter_idr, adap->nr);
mutex_unlock(&core_lock);
return res;
}
重点来了,查看i2c_scan_static_board_info(adap)函数,这个函数中会注册所有设备树中定义的设备。看代码:
static void i2c_scan_static_board_info(struct i2c_adapter *adapter)
{
struct i2c_devinfo *devinfo;
down_read(&__i2c_board_lock);
list_for_each_entry(devinfo, &__i2c_board_list, list) {
if (devinfo->busnum == adapter->nr
&& !i2c_new_device(adapter,
&devinfo->board_info))
dev_err(&adapter->dev,
"Can't create device at 0x%02x\n",
devinfo->board_info.addr);
}
up_read(&__i2c_board_lock);
}
..............................
/**
* i2c_new_device - instantiate an i2c device
* @adap: the adapter managing the device
* @info: describes one I2C device; bus_num is ignored
* Context: can sleep
*
* Create an i2c device. Binding is handled through driver model
* probe()/remove() methods. A driver may be bound to this device when we
* return from this function, or any later moment (e.g. maybe hotplugging will
* load the driver module). This call is not appropriate for use by mainboard
* initialization logic, which usually runs during an arch_initcall() long
* before any i2c_adapter could exist.
*
* This returns the new i2c client, which may be saved for later use with
* i2c_unregister_device(); or NULL to indicate an error.
*/
struct i2c_client *
i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info)
{
struct i2c_client *client;
int status;
client = kzalloc(sizeof *client, GFP_KERNEL);
if (!client)
return NULL;
client->adapter = adap;
client->dev.platform_data = info->platform_data;
if (info->archdata)
client->dev.archdata = *info->archdata;
client->flags = info->flags;
client->addr = info->addr;
client->irq = info->irq;
if (!client->irq)
client->irq = i2c_dev_irq_from_resources(info->resources,
info->num_resources);
strlcpy(client->name, info->type, sizeof(client->name));
status = i2c_check_addr_validity(client->addr, client->flags);
if (status) {
dev_err(&adap->dev, "Invalid %d-bit I2C address 0x%02hx\n",
client->flags & I2C_CLIENT_TEN ? 10 : 7, client->addr);
goto out_err_silent;
}
/* Check for address business */
status = i2c_check_addr_busy(adap, i2c_encode_flags_to_addr(client));
if (status)
goto out_err;
client->dev.parent = &client->adapter->dev;
client->dev.bus = &i2c_bus_type;
client->dev.type = &i2c_client_type;
client->dev.of_node = info->of_node;
client->dev.fwnode = info->fwnode;
i2c_dev_set_name(adap, client);
if (info->properties) {
status = device_add_properties(&client->dev, info->properties);
if (status) {
dev_err(&adap->dev,
"Failed to add properties to client %s: %d\n",
client->name, status);
goto out_err;
}
}
status = device_register(&client->dev);
if (status)
goto out_free_props;
dev_dbg(&adap->dev, "client [%s] registered with bus id %s\n",
client->name, dev_name(&client->dev));
return client;
out_free_props:
if (info->properties)
device_remove_properties(&client->dev);
out_err:
dev_err(&adap->dev,
"Failed to register i2c client %s at 0x%02x (%d)\n",
client->name, client->addr, status);
out_err_silent:
kfree(client);
return NULL;
}
EXPORT_SYMBOL_GPL(i2c_new_device);
在i2c_register_adapter函数中,bus_for_each_drv(&i2c_bus_type, NULL, adap, __process_new_adapter)函数会遍历所有注册了的驱动。利用__process_new_adapter()函数进行处理。
static int i2c_do_add_adapter(struct i2c_driver *driver,
struct i2c_adapter *adap)
{
/* Detect supported devices on that bus, and instantiate them */
i2c_detect(adap, driver);
/* Let legacy drivers scan this bus for matching devices */
if (driver->attach_adapter) {
dev_warn(&adap->dev, "%s: attach_adapter method is deprecated\n",
driver->driver.name);
dev_warn(&adap->dev,
"Please use another way to instantiate your i2c_client\n");
/* We ignore the return code; if it fails, too bad */
driver->attach_adapter(adap);
}
return 0;
}
static int __process_new_adapter(struct device_driver *d, void *data)
{
return i2c_do_add_adapter(to_i2c_driver(d), data);
}
该函数会检查驱动与适配器上所在总线上的设备是否匹配。
3.I2C设备驱动
最后我们来看一下设备驱动。说一下一个i2c通用的驱动,其位于文件drivers/i2c/i2c-dev.c,首先来看
i2c_dev_init(void)函数的定义:
static int __init i2c_dev_init(void)
{
int res;
printk(KERN_INFO "i2c /dev entries driver\n");
res = register_chrdev_region(MKDEV(I2C_MAJOR, 0), I2C_MINORS, "i2c");
if (res)
goto out;
i2c_dev_class = class_create(THIS_MODULE, "i2c-dev");
if (IS_ERR(i2c_dev_class)) {
res = PTR_ERR(i2c_dev_class);
goto out_unreg_chrdev;
}
i2c_dev_class->dev_groups = i2c_groups;
/* Keep track of adapters which will be added or removed later */
res = bus_register_notifier(&i2c_bus_type, &i2cdev_notifier);
if (res)
goto out_unreg_class;
/* Bind to already existing adapters right away */
i2c_for_each_dev(NULL, i2cdev_attach_adapter);
return 0;
out_unreg_class:
class_destroy(i2c_dev_class);
out_unreg_chrdev:
unregister_chrdev_region(MKDEV(I2C_MAJOR, 0), I2C_MINORS);
out:
printk(KERN_ERR "%s: Driver Initialisation failed\n", __FILE__);
return res;
}
static void __exit i2c_dev_exit(void)
{
bus_unregister_notifier(&i2c_bus_type, &i2cdev_notifier);
i2c_for_each_dev(NULL, i2cdev_detach_adapter);
class_destroy(i2c_dev_class);
unregister_chrdev_region(MKDEV(I2C_MAJOR, 0), I2C_MINORS);
}
其中 class_create(THIS_MODULE, “i2c-dev”),是创建设备节点。我们看i2c_for_each_dev(NULL, i2cdev_attach_adapter)函数,
i2cdev_attach_adapter()定义如下:
static int i2cdev_attach_adapter(struct device *dev, void *dummy)
{
struct i2c_adapter *adap;
struct i2c_dev *i2c_dev;
int res;
if (dev->type != &i2c_adapter_type)
return 0;
adap = to_i2c_adapter(dev);
i2c_dev = get_free_i2c_dev(adap);
if (IS_ERR(i2c_dev))
return PTR_ERR(i2c_dev);
cdev_init(&i2c_dev->cdev, &i2cdev_fops);
i2c_dev->cdev.owner = THIS_MODULE;
res = cdev_add(&i2c_dev->cdev, MKDEV(I2C_MAJOR, adap->nr), 1);
if (res)
goto error_cdev;
/* register this i2c device with the driver core */
i2c_dev->dev = device_create(i2c_dev_class, &adap->dev,
MKDEV(I2C_MAJOR, adap->nr), NULL,
"i2c-%d", adap->nr);
if (IS_ERR(i2c_dev->dev)) {
res = PTR_ERR(i2c_dev->dev);
goto error;
}
pr_debug("i2c-dev: adapter [%s] registered as minor %d\n",
adap->name, adap->nr);
return 0;
error:
cdev_del(&i2c_dev->cdev);
error_cdev:
put_i2c_dev(i2c_dev);
return res;
}
查看get_free_i2c_dev()函数。
static struct i2c_dev *get_free_i2c_dev(struct i2c_adapter *adap)
{
struct i2c_dev *i2c_dev;
if (adap->nr >= I2C_MINORS) {
printk(KERN_ERR "i2c-dev: Out of device minors (%d)\n",
adap->nr);
return ERR_PTR(-ENODEV);
}
i2c_dev = kzalloc(sizeof(*i2c_dev), GFP_KERNEL);
if (!i2c_dev)
return ERR_PTR(-ENOMEM);
i2c_dev->adap = adap;
spin_lock(&i2c_dev_list_lock);
list_add_tail(&i2c_dev->list, &i2c_dev_list);
spin_unlock(&i2c_dev_list_lock);
return i2c_dev;
}
这个函数其实就是为i2c对象申请内存,并且加入到i2c_dev_list链表中。
参考文章:
https://www.cnblogs.com/lknlfy/p/3265078.html














 9750
9750











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









