






基于AT89C51单片机的智能炒菜机设计、C语言的编程以及硬件结构和设计
仿真、程序、原文都有
本设计的核心传感器就是温度传感器DS18B20,其性能优越,使用起来特别方便简单,而且它采集到温度信息时是数字量。
单片机处理,判断当前温度值高低,温度高了,电机转速快点,加热电阻停止工作,防止菜品糊了;温度低了,翻炒慢点,加热电阻开始工作,使得菜品充分吸热。
YID:7519667930440627
魔神星巨蟹座花朵
智能炒菜机的探索之旅:以AT89C51单片机为核心的数字温度控制设计
今天我们将深入探讨一种智能炒菜机的设计思路,尤其关注于如何以AT89C51单片机为基础,利用温度传感器DS18B20来实现智能化的炒菜过程。
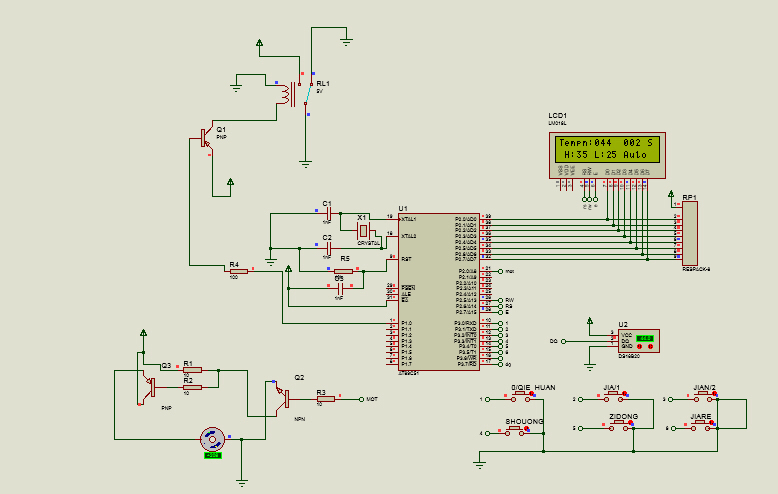
一、硬件结构与设计
我们的智能炒菜机设计以AT89C51单片机为核心,它负责整个的控制与处理。这款单片机具有强大的处理能力,能够快速响应各种指令和事件。与此同时,我们的炒菜机还配备了一个强大的电机来控制翻炒动作,以及一个可调制的加热电阻,用以控制炒菜的火候。
此外,本设计的核心传感器——DS18B20温度传感器——其作用也十分关键。它的工作原理是将感知到的温度信息转换为数字信号,传输给单片机进行处理。此传感器的优点在于操作简单,而且由于其输出的温度信息为数字量,能够提高测温精度和抗干扰能力。
二、C语言的编程
在编程方面,我们采用了C语言进行程序编写。C语言是一种功能强大的编程语言,尤其适用于嵌入式开发。在编写程序时,我们首先需要对DS18B20的通信协议进行深入了解,并利用C语言实现与单片机的通信。
三、与硬件的协同工作
在炒菜过程中,我们的会实时监测锅内的温度。当温度信息通过DS18B20传达到AT89C51单片机后,将开始进行处理。若检测到当前温度过高,则单片机会命令电机提高转速,使菜品在锅内更充分地翻滚。同时,它会发送停止工作的指令给加热电阻,防止菜品因为过热而烧糊。
反之,若温度偏低,单片机会根据采集的温度数据调节电机的翻炒速度。通过慢点翻炒的方式使得菜品能更好地吸收热量,同时也会启动加热电阻进行工作,使菜品迅速升温。
四、示例代码片段
以下是一个简单的C语言代码片段,用于演示如何读取DS18B20的温度数据并由单片机进行相应的处理:
// 初始化DS18B20及单片机的I/O端口等基础操作...
// ... 省略其他初始化代码 ...
// 读取温度数据
double read_temperature() {
// 通过C语言编写函数实现与DS18B20的通信协议交互等操作
// 返回获取的温度值
}
// 主程序部分
while(true) { // 主循环
double current_temperature = read_temperature(); // 读取当前温度值
if (current_temperature > THRESHOLD_HIGH) { // 判断是否超过预设的高温阈值
// 执行高温时的处理逻辑(如提高电机转速、停止加热等)
} else if (current_temperature < THRESHOLD_LOW) { // 判断是否低于预设的低温阈值
// 执行低温时的处理逻辑(如降低电机转速、启动加热等)
}
// 其他程序逻辑...
}
请注意这只是一个简化的示例代码片段,真正的开发需要考虑更多的因素和复杂的编程逻辑。另外由于硬件差异和项目具体需求不同,具体代码还需要根据实际的项目要求进行调整和优化。但是该代码可以作为对单片机的程序流程及如何根据DS18B20获取的数据来执行控制命令的基本参考。
总的来说,我们的智能炒菜机设计致力于为消费者提供一个方便、高效的炒菜体验。以AT89C51单片机为核心,结合DS18B20温度传感器的精确测温能力,我们能够实现更为智能化的炒菜过程控制。希望未来这一设计能够为更多家庭带来便利和美味佳肴。
全篇干货,有请: http://lanzous.cn/667930440627.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









