







 本文介绍了双相机混进混出应用场景的实施方案,包括相机安装要求、视频触发抓拍时间建议,以及软件如宇视系统和PMS系列设备的配置步骤。强调了车道深度和匹配时间的重要性,适用于智慧停车系统管理。
本文介绍了双相机混进混出应用场景的实施方案,包括相机安装要求、视频触发抓拍时间建议,以及软件如宇视系统和PMS系列设备的配置步骤。强调了车道深度和匹配时间的重要性,适用于智慧停车系统管理。
双相机+混进混出方案实施介绍及配置指导
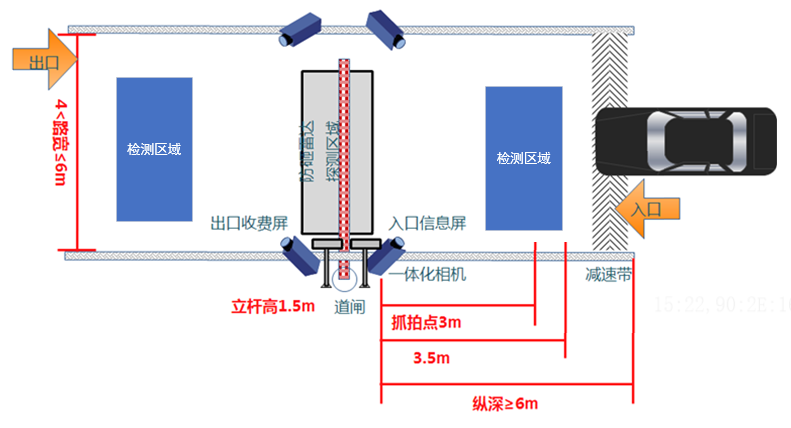
结合双相机和混进混出的应用场景,由于需要混进混出,且4<路宽≤6m不适合一进一出,则考虑此方案的应用。同混进混出方案要求,双相机混进混出方案需要12米以上纵深。
- 方案介绍及工勘要求
工程说明:
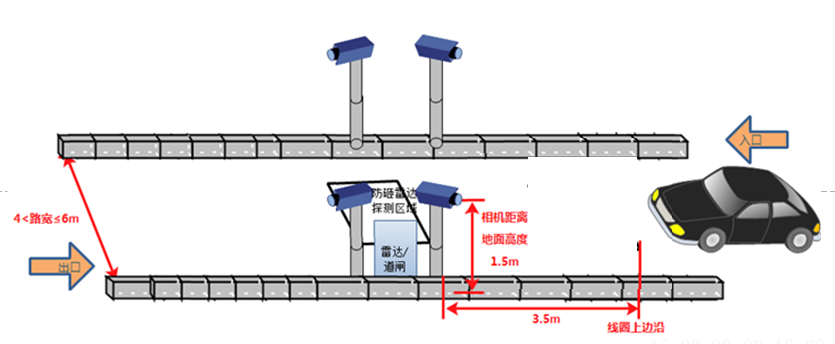
- 相机安装高度均为1.5m,安装于道闸两边,抓拍点均为3m(线圈中间位置)。
- 道闸两边纵深需大于6m。
- 使用视频触发方式,通过视频在车辆进入车辆识别区域触发抓拍。
• 对侧副相机工程安装同道闸侧主相机,起辅助抓拍作用。
- 软件配置
-
-
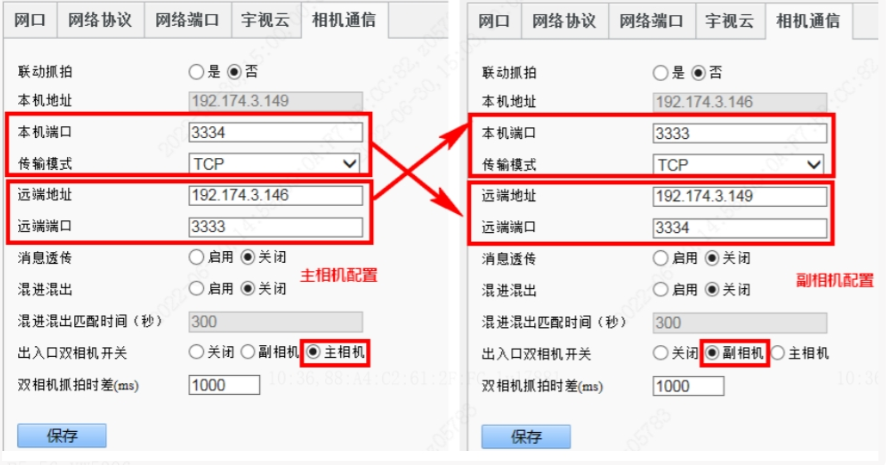
- 双相机配置
-
-
进入相机web页面,在【配置】【网络】【相机通信】中进行配置,按照下图进行配置即可。
- 现场在标准场景下(现场车道纵深长,正向进车),双相机抓拍时间建议为默认的1000ms.
- 现场三向进车或者识别角度大等场景下建议双相机抓拍时间设在3000ms内,设置时间过长会影响抬杆快慢
- 若场景实际情况需要增加双相机匹配时间,请联系宇视工程师确认
- 双相机模式下,只需要将主相机添加到后端服务器的车道,副相机不需要做任何添加配置。
-
-
- 混进混出配置
-
-
因相机不能同时开启混进混出和双相机,故混进混出需要后端(PMS131、PMS351、智慧停车云平台)进行配置。
下面用PMS131进行举例配置介绍:
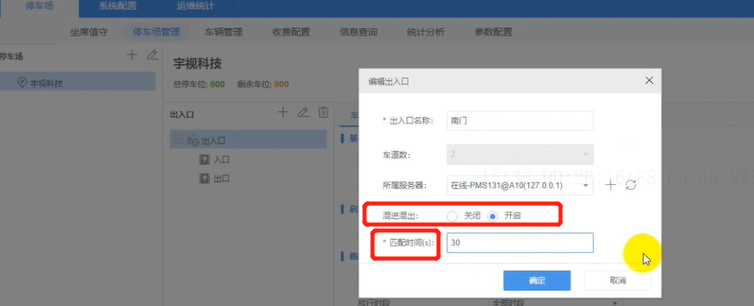
- 在停车场管理-创建编辑出入口,车道数选择2,分别添加进口和出口的主相机,开启混进混出,默认匹配时间60S,若不是则默认关闭即可。
- 在混进混出时间内,相同车牌会进行过滤服务器测启用混进混出
- 现场配置混进混出的时间间隔将扫码出场的时间包含在内,具体根据现场情况设置
Thanks
-END-


















 153
153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









