






出入口道闸砸车常见原因及解决方案集锦
一、背景概述
近年来,随着车辆保有量的不断增加,出入口道闸砸车事件也时有发生。这些事件不仅给车主带来了经济损失,还可能对人身安全造成损害。为了深入了解砸车事件的原因、特点及其防范措施,我们编写了这份“出入口道闸砸车原因及解决方案集锦”。
二、文档目的
通过收集和整理近年来发生的砸车事件数据,分析砸车事件出现的原因和处理方法,为大家整理了以下几点:什么原因会导致砸车?遇到砸车后该收集哪些信息?对于砸车事件出现后处理流程如何?砸车是否一定是产品问题?以帮助大家在日常遇到出入口砸车时能有效处理,快速定位和解决问题。
三、出入口道闸防砸原理

- 道闸杆件抬起后,无车辆或人员经过杆件下方时,道闸不会进行自动落杆。
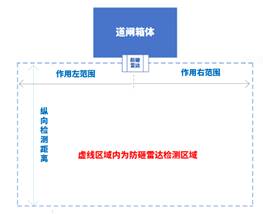
- 道闸杆件抬起后,车辆经过道闸时,防砸雷达(安装在道闸侧面)/防砸线圈(敷设在道闸杆件下方)会检测到车辆,给道闸一个持续抬杆信号,防止道闸在有车辆时落杆,防止砸车。
- 车辆离开道闸防砸区域后,雷达/地感线圈给道闸的持续抬杆信号消失,道闸进行落杆,恢复拦车状态。
四、防砸雷达工作原理
出入口防砸雷达是一种高效的安全检测设备,以灵敏度高、可靠性强、检测范围广以及适应性强等方面广泛应用于停车场、车库、工厂大门等场景,保证车辆安全通过出入口。因雷达具有易安装部署、寿命长、检测灵敏度高等特点,逐步成为出入口主要的防砸装置,以下以雷达为例,讲述防砸的原理。
防砸雷达通过发射和接收电磁波,结合信号处理技术,实时监测出入口区域的障碍物,从而实现安全防砸功能;其灵敏度和检测范围通常可以根据实际需求进行调节,以适应不同的场景。
五、常见砸车原因介绍

1.操作/配置问题
- 防砸雷达配置:防砸雷达“近端不检测距离”设置过长,车辆到达杆件下方时,车辆进入“近端不检测距离”此时雷达检测波束整个面的信号都被遮挡,导致道闸落杆落杆。
原因分析:雷达的覆盖范围特性决定,目标离雷达距离过近会导致雷达检测失效。
解决方案:建议将雷达“近端不检测距离”保持默认值,按产品标准施工避免雷达离过往车辆过近,避免车辆或者行人进入“近端不检测距离”内,导致雷达无法检测到目标从而落杆。
若因施工或环境问题,出现雷达近端有固定目标影响雷达检测,及时联系宇视工程师或宇视400热线(400 655 2828)进行反馈,评估解决方案。
注:近端不检测距离默认0.4米。
- 防砸雷达配置:防砸雷达“纵向作用距离”设置过短,杆件末端过车导致雷达未检测导致车辆。
原因分析:雷达的覆盖范围特性决定,目标离雷达距离过远且未正确标识,会导致车辆实际行驶路径超出雷达检测区域,雷达因检测不到目标停止发送防砸信号,导致道闸落杆动作。
解决方案:正确配置雷达的参数:防砸雷达“纵向作用距离(米)”=实际的杆件长度(米)-0.5(米)。
- 防砸雷达配置:防砸雷达未正确配置“直杆方向”,与实际杆件类型或场景不匹配导致砸车。


原因分析:杆件为曲臂、伸缩杆、杆件上有干扰物时,导致杆件在落杆到位(水平状态)雷达一直检测到杆件或杆件上目标,下一次过车起杆后,因检测目标离开雷达检测区域,检测信号消失,雷达通知道闸杆件落杆,此时若车辆通过则可能撞到杆件。
解决方案:若现场杆件存在上述情况,需设置“直杆方向”(该配置使雷达不检测杆件区域)。
- 人为落杆及道闸配置 “自动延时关闸时间”或“开闸保持时间”为启用时(值不为0),道闸按配置落杆,如此时通行车辆速度过快,可能导致撞杆。
解决方案:
① 控制车辆通过道闸的速度,如在抓拍点附近增加减速带,可有效降低车 速,增加系统反应时间。
② 降低道闸落杆速度。如项目启用“自动延时关闸时间”或“开闸保持时间”功能,建议调低道闸延时落杆速度,降低车辆与道闸碰撞概率。
- 车辆跟车进/出通过道闸时,车辆撞到杆件。
原因分析:车辆速度过快。
解决方案:
降低车辆速度,如在抓拍点附近增加减速带,可有效降低车速,增加系统反应时间。
- 一进一出两边闸(中间无隔离),道闸同时开启,车辆跨两车道通过时(常见大型车辆通行),车辆一侧少量占据对向车道空间时,因雷达对于杆件末端检测信号相对有衰减,低概率会导致雷达防砸信号消失,对向车道侧落杆砸车。
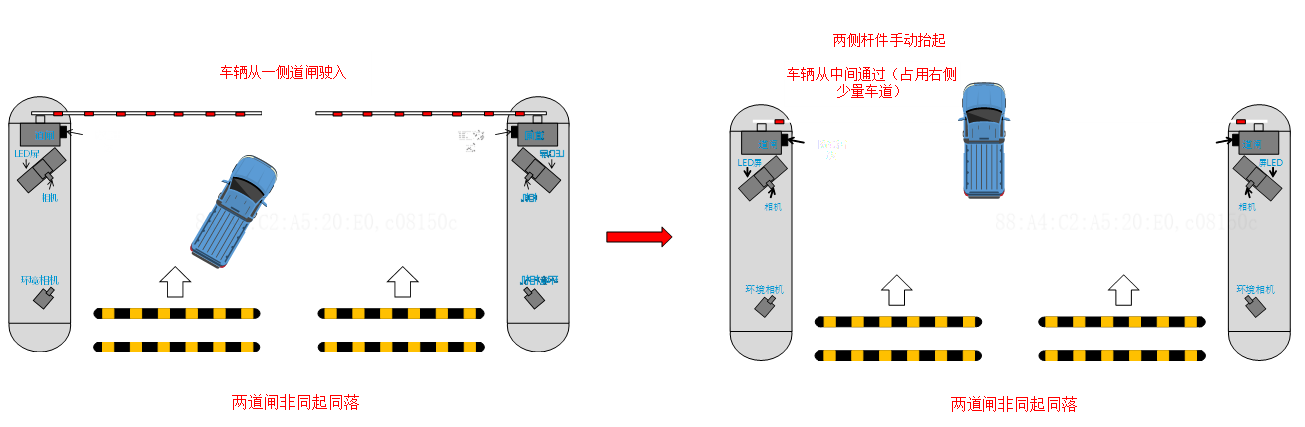
原因分析:车辆未按车道行驶,刚好超出雷达检测配置的最远范围临界值,造成检测异常。
解决方案:规范车辆通行,避免两边道闸同时抬杆时车辆通过;
如无法避免(如大车通过时),必须将两侧道闸同时抬起,建议人为遥控器长抬杆或让道闸进入车队模式,待车辆驶离后,再进行遥控落杆。
2.环境问题
- 雷达被环境干扰,造成误判,提前中断防砸信号输出,此时如车辆未通行完毕,则可能造成砸车。
原因分析:杆件在落杆到位(水平状态)雷达检测干扰物(因环境有干扰,雷达误检),下一次过车起杆后,会有概率出现检测信号消失,雷达通知道闸杆件落杆,此时若车辆通过则可能撞到杆件。
常见干扰物:下水道和井盖影响。


雷达范围内有干扰目标:


解决方案:
工勘阶段确认场景是否存在井盖和下水道情况,若存在,雷达开孔位置需距离地面80cm(若出现雷达安装高度和杆件高度齐平可联系宇视工程师协助处理)。
门类设备与道闸之间安装距离保证在2米以上,避免影响雷达检测。
除道闸以外设备安装时尽量避免超出雷达安装位置,否则会影响雷达检测。
3.方案问题
- 未按方案要求使用双雷达方案:
广告道闸未按要求配置立柱雷达,车辆经过时,先经过杆件,再经过雷达时,未增加立柱雷达,雷达对于杆件测检测距离过短,会导致雷达无法及时检测到车辆从而车辆和杆件发生碰撞。
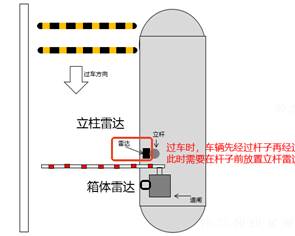
通行车辆有地盘高度≥90CM的车辆时,未增加高位立柱雷达;箱体雷达检测高度在85CM以下,对于90CM以上的车辆,会存在检测不到情况,从而雷达信号消失落杆。
原因分析:广告道闸因其特性,需要配置双雷达满足检测要求,单雷达无法覆盖正常场景,可能导致防砸失效,引发砸车。
解决方案:广告道闸必须配套箱体雷达和立柱雷达使用。
六、砸车问题处理思路及处理流程详解
详细讲解:
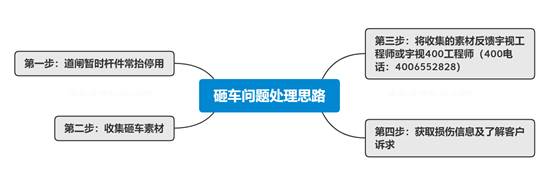
1.道闸暂时开启常抬模式,待问题定位分析及问题解决后再行启用,防止二次砸车现象。
2.素材收集:
1)事发监控,要有日、时、分、秒,事故发生前5辆正常过车以及砸车后的连续视频。
2)雷达固件版本、序列号。
3)雷达安装位置、高度。
4)雷达参数、历史调试记录。
5)雷达日志,按照一辆车3条计算,从砸车到收集日志时间为止,按过车记录*3+500为雷达日志收集条数。
6)道闸型号铭牌、杆件长度、杆件长度。
7)砸车的车辆及前后5辆车的过车记录截图。
8)砸车道闸的相机诊断信息。
因砸车素材都需要环境视频和相机日志,建议出入口方案中增加环境相机或使用可视防砸雷达,可有效获取到砸车时的监控视频。
3.将收集的素材反馈宇视工程师或宇视400热线(400电话:4006552828)。
素材收集完成后,联系宇视工程师(办事处一线工程师、产品区域二线工程师、宇视400客服工程师)。
4.获取车损及道闸情况:
1)车辆品牌及型号。
2)车损位置及车损照片。
3)道闸或者其他设施是否存在损伤。
七、案例讲解
- 案例一:(配置问题)伸缩杆道闸,未设置“直杆方向”导致砸车
道闸型号:PK-UZ40A-L-A-ZD

杆件长度及类型:伸缩杆,4.8米(非设备标配杆件,第三方自行安装)。
防砸雷达安装高度:安装在道闸上孔位,距离地面65CM。
现场问题现象:出入口相机抓拍车辆抬杆后,杆件抬起后自动落杆,防砸不生效。
问题分析:
1.通过现场视频及描述观察,初步怀疑落杆信号为雷达下发。
2.手机APP导出雷达日志,通过防砸雷达日志分析,在车辆通过道闸前,雷达一直处于检测到物体状态,等待杆件抬起后,触发信号消失,立即落杆。
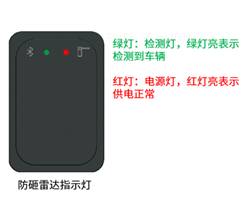
备注:现场测试时发现杆件落下后,雷达绿灯一直常亮,起杆后会立马落杆。
3.从雷达日志中看到,雷达检测上报的坐标点是杆件上的伸缩连接处。经落实现场采用的是伸缩杆,伸缩杆未配置“直杆方向”配置导致雷达误检,从而起杆后落杆。



问题原因:
1.现场道闸标配的是带胶条的直杆,而项目现场更换为伸缩杆,杆件类型发生变化。
2.道闸雷达默认参数适配直杆,未配置“直杆方向”配置导致雷达误检,从而起杆后落杆,车辆经过时,雷达虽检测到车辆且发送防砸信号,但因杆件下落速度较快无法立即起杆导致砸车。
解决方案:
重新调试雷达参数:
1.左右作用距离设置1米。
2.杆件纵向作用距离为杆件长度减去0.4米。

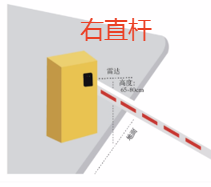
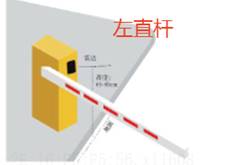
3.杆件类型选择直杆道闸,并在右上角进入高级设置,设置直杆方向为左直杆(面向雷达,杆件在道闸的左边就是左直杆)。


4.配置完成后进行背景学习。
注:调整完雷达后,建议测试10次以上起落杆,保证雷达检测正常。
- 案例二:(遥控操作落杆)遥控器落杆期间车辆经过导致砸车
问题描述:出入口道闸杆件抬起时未落杆,后车通过时突然落杆,车辆与杆件发生碰撞。
问题分析:
1.通过监控视频还原事故情况:
a、监控显示1月10日7:39:22左右车辆在驶入道闸区域前,在杆件长抬,车往前开的时候,突然落杆导致车辆与道闸杆件发生碰撞。
2.道闸下落原因日志分析:
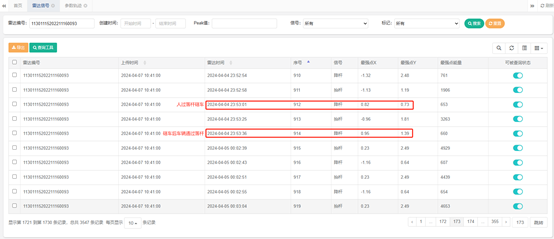
此次砸车前监控中过车落杆时间点分别 1 月 10 日 7:37:24, 7:38:05,7:38:31,在 7.39.22 落杆砸车, 根据落杆时间查询到雷达日志如下:
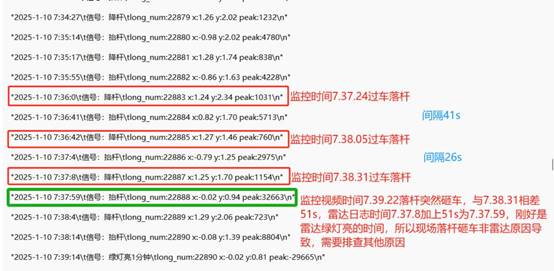
分别对应雷达时间 2025 年 1 月 10 日(7:36:0, 7:36:42, 7:37:08),根据砸车监控视频推断砸车时雷达日志时间是 7:37:59。
可以看出雷达未给出落杆信号。
3.其他方面分析:
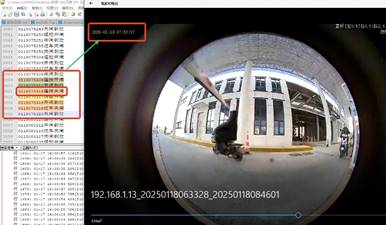
因现场使用第三方出入口相机,不支持与道闸日志通信功能,因此未能记录砸车时的信号日志。对此我司及与可视防砸雷达开发新版本(支持获取道闸日志并记录),升级并获取到砸车后几天的日志记录,对此进行分析,分析过程如下:
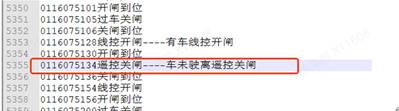
(1)自砸车后几天观察,发现现场也有出现道闸异常落杆现象,经过日志和视频分析,均为人为遥控落杆。


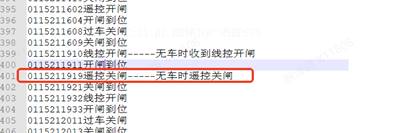
(2)1月19日另一个道闸出现非机动车经过时,杆件异常下落导致非机动车和杆件发生碰撞;经日志分析也为人为遥控落杆导致。
问题原因:
综上分析过程,可以得出,现场出现砸车时,为人为遥控控制道闸落杆。
解决方案:
(1)管理规范化:建议客户管控遥控落杆操作,建议车道上无车时再进行遥控关闸;或遥控关闸时,一定要人为管控车辆通行,避免车辆往前行驶时人为遥控关闸。
(2)使用人员操作培训:建议使用遥控器时,注意遥控按键,避免按错导致道闸异常落杆(冬天戴手套使用遥控时尤为需要注意,避免按错),可对操作员进行培训,加强遥控器使用规范和注意事项。
(3)若现场不强制要求必须遥控落杆,可取消遥控器,通过过车自动落杆;现场若需要人为手动抬杆,可在道闸起杆接线端子上接一个开关,控制道闸手动抬杆。
(4)现场可更换防撞圆杆,若再次出现道闸和杆件发生碰撞,防撞圆杆可减少车辆损伤。
(5)请现场管控出入口通行车辆,避免非机动车或者行人从杆件下方防砸区域内经过。
备注说明:
为什么车辆行驶到防砸区域,雷达检测到车辆还会造成车辆和道闸发生碰撞呢?
答:雷达检测车辆并上报时间很短,但道闸杆件从物理落杆状态切换到抬杆状态需要时间(下落-停止-抬起-抬到位)。尤其杆件速度较快时,耗时更长。如此时车辆速度也快,通过时间快于杆件状态切换时间,就会撞杆。
- 案例三:(环境问题)车辆通过前行人干扰雷达检测导致砸车
问题描述:手动遥控器抬杆后,在车辆驶入小区时杆件自动落杆砸车。
问题分析:
背景:
局点为单通道双闸对开场景,无箱体雷达,只有立柱雷达(雷达在入口内测)。车辆行驶车头先经过道闸再经过雷达。
1.通过监控视频还原事故情况:
(1)23:57:21秒,保安手动抬杆,在车辆进入前,23:57:28秒,有个行人从道闸下通过,触发防砸雷达,防砸雷达在起杆后,行人离开,道闸执行落杆动作,此时车辆进入,防砸雷达未及时抬杆导致砸车。
2.道闸下落原因分析:
(1)通过防砸雷达日志分析,在车辆通过道闸前,行人从道闸下通过,导致雷达检测到行人,行人离开后道闸落杆。



(2)现场未安装箱体雷达,只安装了立柱雷达,立柱雷达在入口内测,距离道闸30公分,导致雷达对于入口检测范围较小,车辆在道闸落杆时通过,无法及时检测到车辆,导致砸车。

问题原因:
手动抬杆后,车辆进入前,行人从道闸下通过导致雷达检测到行人,行人离开后,道闸落杆,此时车辆进入,但因现场无箱体雷达,立柱雷达安装位置离车辆过远,无法检测到车辆,导致刮蹭车辆。
解决方案:
(1)进行人车分离,避免行人在道闸下通行。
(2)将立柱雷达改为箱体雷达(或增加箱体雷达),安装在道闸上孔位,距离地面65cm。按照箱体雷达调试方法完成雷达调试。
- 案例四:(环境问题)车辆进入“雷达近端不检测距离”导致砸车
问题描述:
12月16日15点21分左右(反馈的监控视频中时间),车辆刮擦道闸后,闸杆下落触碰车身。
问题分析:
背景:
现场是一个单通道出口雷达场景。车辆行驶车头先经过杆件再经过雷达,在杆件下方时车辆剐蹭到道闸。
1.通过监控视频还原事故情况:
(1)监控显示2024年12月16日15点21分左右车辆在驶入道闸区域,在杆件抬起后,车辆距离道闸过近,撞到道闸杆件,车辆贴紧道闸箱体和防砸雷达,在车辆前后挪移时杆件落杆触碰车辆。

2.道闸下落原因分析:
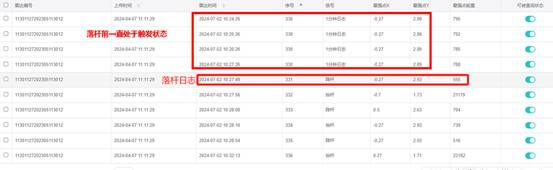
(1)通过雷达日志看到,车辆驶入道闸区域时在距离道闸0.92米(此时距离雷达横向距离为0.89米)时,雷达检测到车辆,上报不落杆信号;在车辆进入杆件区域后,车辆因距离道闸过近,剐蹭到道闸杆件,此时雷达日志中显示(如下图所示,落杆信号给出时,此时车辆已在雷达“近端不检测距离0.4范围内” 即雷达近端检测的整个波束面,被车辆遮挡),车辆进入雷达“近端不检测距离”雷达会对该距离内的目标进行过滤,认为车辆离开,触发落杆信号上报,杆件落杆触碰到车辆车顶。

问题原因:
车辆驶入道闸区域时,车辆剐蹭到道闸并进入雷达“近端不检测距离”内,雷达近端检测的整个波束面,被车辆遮挡,雷达检测目标消失,雷达会对该距离内的目标进行过滤,认为车辆离开,触发落杆信号上报,道闸落杆触碰到车辆。
解决方案:
建议客户在雷达1.3米范围外设置车辆引导锥,引导车辆行驶轨迹,避免车辆行驶时车辆距离道闸过近导致影响防砸雷达检测。
备注说明:
雷达不检测距离说明:
1.雷达因电磁波传播特性等检测原理,本身就会存在近端盲区。
2.雷达默认配置“近端不检测距离”默认0.4,是为了避免雷达近端有固定干扰物,如安全岛、抓拍机、收费指示牌等,影响雷达检测。


















 247
247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









