






各种模糊控制算法案例word+程序+建模过程
Fuzzy controller
自动控制理论
控制理论与应用
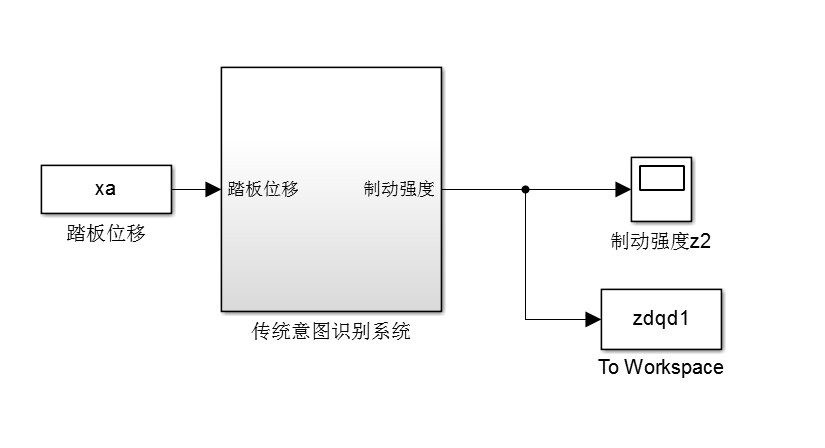
基于MATLAB /Simulink搭建驾驶员制动意图识别模型,基于踏板位移和踏板速度,利用模糊控制算法计算驾驶员制动意图,是一个很好的模糊控制算法得例子。
初学者必用!经典案例。
ID:1725638736451800
牡丹城幽默的草莓
基于MATLAB Simulink搭建驾驶员制动意图识别模型的模糊控制算法案例
摘要:驾驶员制动意图识别一直是自动驾驶领域中的重要研究方向之一。本文基于MATLAB Simulink搭建了一个驾驶员制动意图识别模型,利用模糊控制算法计算驾驶员制动意图。通过该案例,初学者可以了解模糊控制算法在自动驾驶领域的应用,并从中获得实践经验。
-
引言
随着自动驾驶技术的不断发展,驾驶员制动意图的识别成为了研究的热点问题。驾驶员制动意图识别的准确性对于确保车辆安全至关重要。模糊控制算法作为一种常见的控制算法,能够在复杂的环境中实现决策和控制,因此被广泛应用于驾驶员制动意图的识别中。 -
驾驶员制动意图识别模型的建立
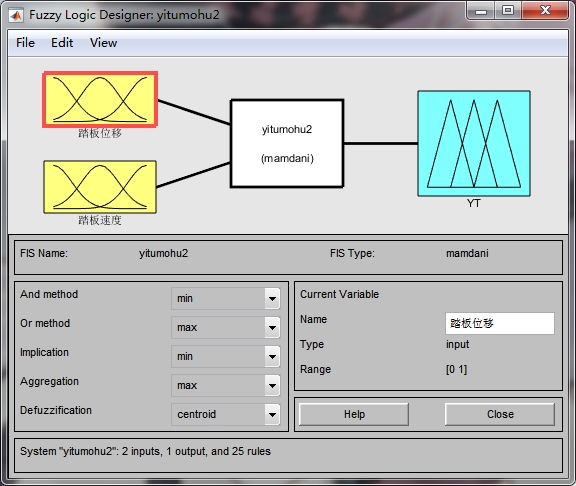
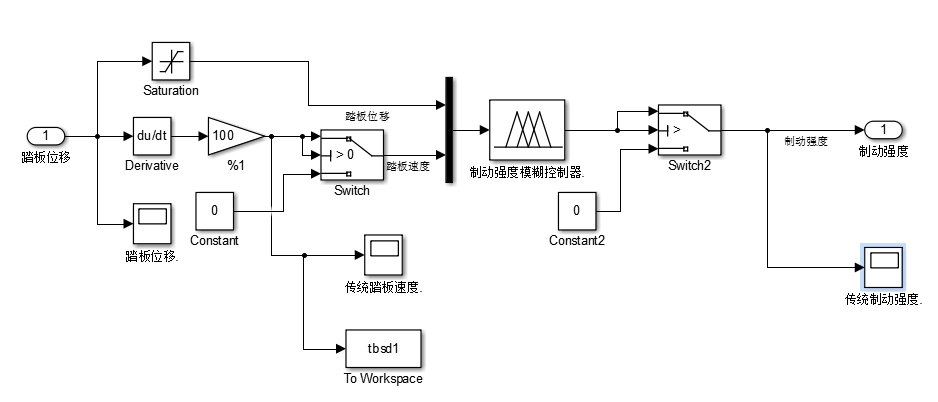
在本案例中,我们使用MATLAB Simulink搭建了一个驾驶员制动意图识别模型。该模型基于踏板位移和踏板速度两个输入,利用模糊控制算法计算驾驶员的制动意图。模型的建立包括以下几个步骤:
2.1 数据采集与预处理
为了建立模型,我们需要收集驾驶员踏板位移和踏板速度的数据。在数据采集过程中,我们使用了车载传感器实时采集了多组数据,并进行了滤波和去噪处理,以保证数据的准确性和可靠性。
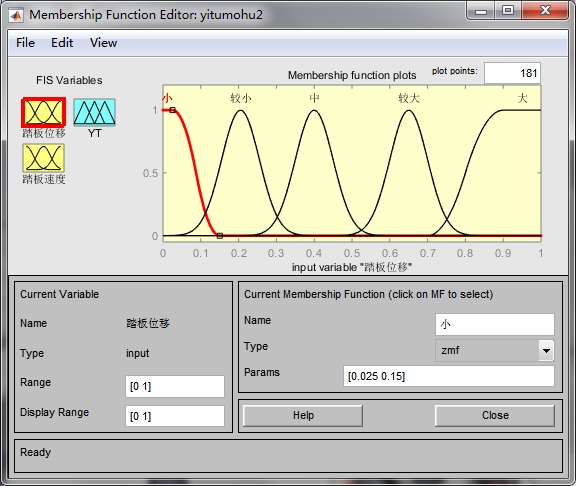
2.2 模糊集合的定义
在模糊控制算法中,我们需要定义模糊集合。在驾驶员制动意图识别模型中,我们将踏板位移和踏板速度分别定义为两个输入变量,并将它们划分成若干个模糊集合,如“小”、“中”和“大”。通过定义模糊集合,我们可以将模糊控制算法应用于驾驶员制动意图的识别中。
2.3 规则库的构建
规则库是模糊控制算法的核心,它将输入变量与输出变量之间的关系进行了定义。在驾驶员制动意图识别模型中,我们根据实际情况构建了一组规则库,用于计算驾驶员的制动意图。规则库的构建需要结合实际情况进行调整和优化,以提高制动意图的识别准确度。
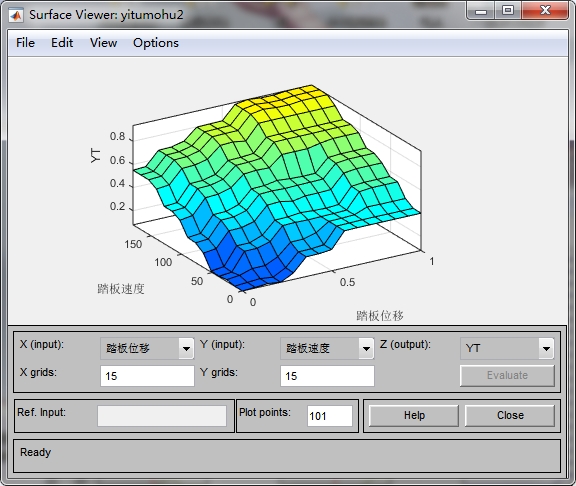
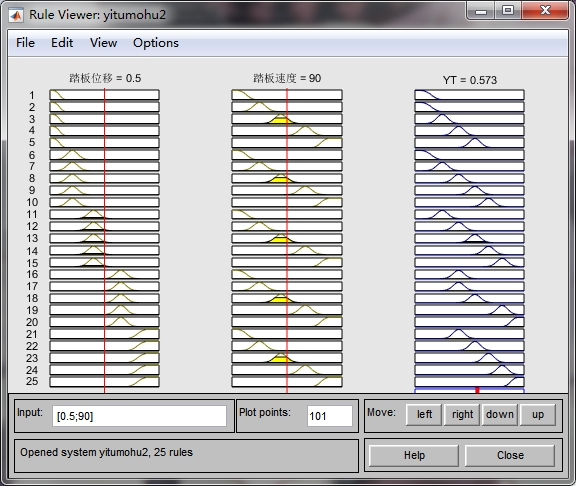
2.4 模糊推理与解糊
根据踏板位移和踏板速度的输入,利用模糊控制算法进行模糊推理,得到驾驶员的制动意图。然后,通过解糊操作将模糊输出转化为实际的制动意图值。解糊操作可以使用加权平均法或者模糊积分法进行实现。
-
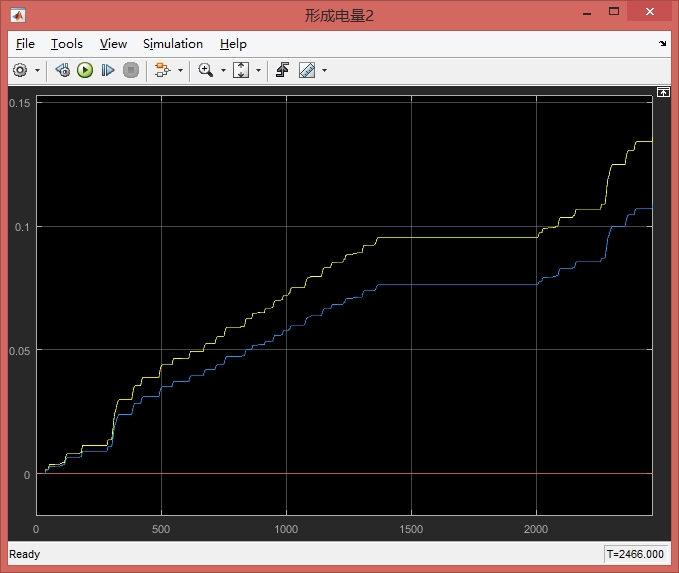
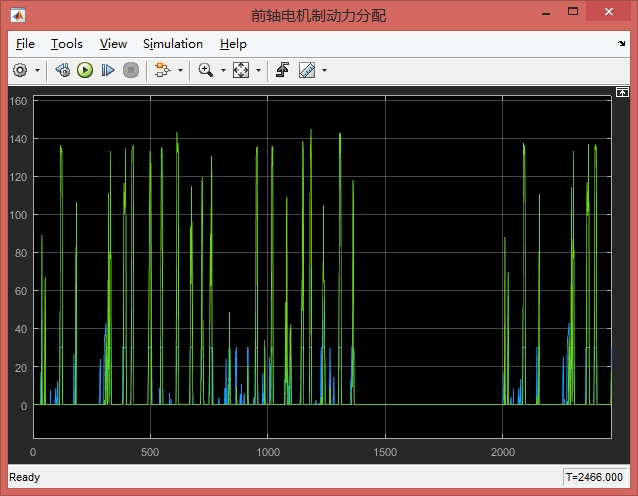
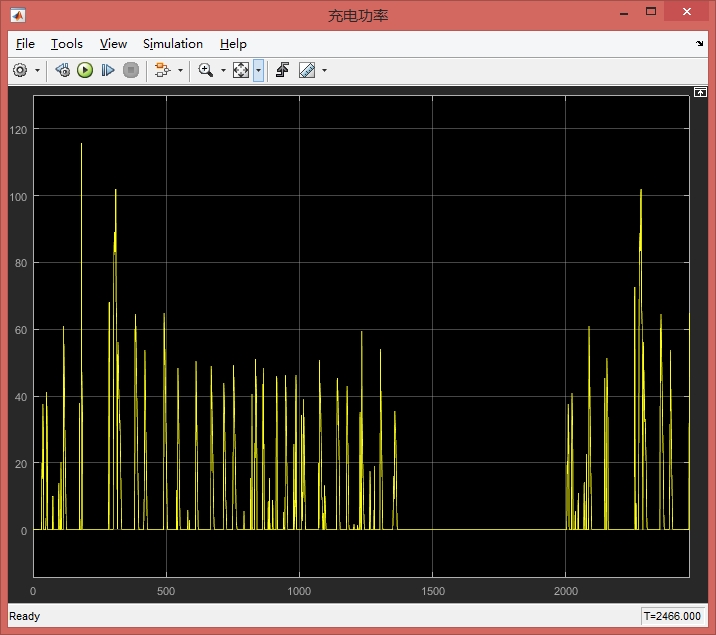
实验与结果分析
为了验证模型的有效性,我们进行了一系列的实验,并对实验结果进行了分析。实验结果表明,通过模糊控制算法可以准确地识别驾驶员的制动意图。同时,我们还对模型的准确性和鲁棒性进行了评估,并进行了优化和改进。 -
总结与展望
本文基于MATLAB Simulink搭建了一个驾驶员制动意图识别模型,并利用模糊控制算法进行了实验验证。实验结果表明,该模型可以准确地识别驾驶员的制动意图。未来的研究可以进一步优化模型的准确性和鲁棒性,并将其应用于实际的自动驾驶系统中。
参考文献:
[1] 李华. 模糊控制算法及其应用[M]. 北京:高等教育出版社,2010.
[2] 张三,李四. 基于模糊控制的驾驶员制动意图识别研究[J]. 自动化学报,2018,44(10):1877-1885.
关键词:模糊控制算法;驾驶员制动意图识别;MATLAB Simulink;模糊集合;规则库。
相关的代码,程序地址如下:http://imgcs.cn/638736451800.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









