







 研究介绍了一种利用光场相机和LFRB技术的粒子追踪测速算法,通过多视角追踪和深度信息整合,有效解决了PIV实验中的景深方向问题。实验对比了plenoptic-PIV和Stereo-PIV,结果显示plenoptic-PTV在平面外速度测量上表现更优。
研究介绍了一种利用光场相机和LFRB技术的粒子追踪测速算法,通过多视角追踪和深度信息整合,有效解决了PIV实验中的景深方向问题。实验对比了plenoptic-PIV和Stereo-PIV,结果显示plenoptic-PTV在平面外速度测量上表现更优。
本项研究详细介绍了一种基于光场相机的粒子追踪测速(PTV)算法,旨在对三维速度场的三分量进行精细化测量。算法核心在于利用相机视角的多样性,辅以三角化测量和粒子追踪技术,有效优化了光场粒子图像测速(PIV)实验中常见的景深方向不确定性难题。
首先采用Light Field Ray Bundling(LFRB)技术进行三维位置评估,框架如图1所示,通过图像数据与物理空间的映射函数将粒子光线投影至测量体。随后,算法在多个视角视图中独立追踪粒子,统合各个视点信息预测粒子随时间的动态轨迹,这不仅增强了三维轨迹估算的准确性,还保护了追踪算法免受深度信息上的非物理波动影响,如图2所示。
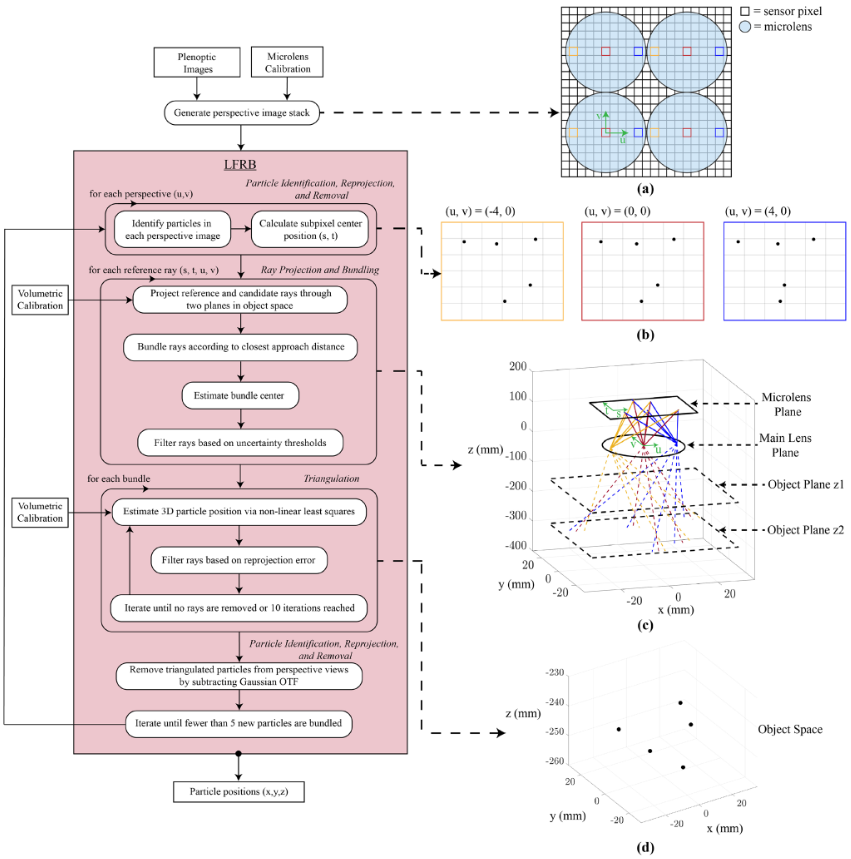
图1 Light Field Ray Bundling(LFRB)算法框架
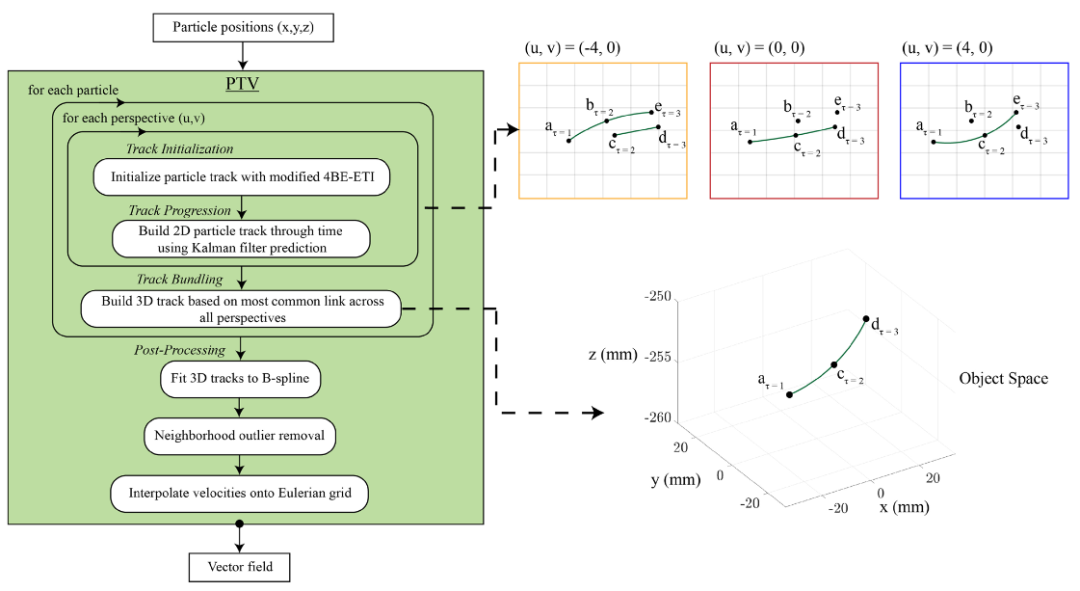
图2 Plenoptic-PTV算法框架
实验验证
研究团队采用两种不同的成像方法,即光场粒子图像测速(Plenoptic-PIV/PTV)与体视粒子图像测速(Stereo-PIV),进行了
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









