






基于距离/非距离的定位算法:
RSSI定位仿真MATLAB实现;扩展卡尔曼滤波,无迹卡尔曼滤波算法用于rssi定位;
模型拟合,三边定位,算法融合。
RSSI算法优化、创新请加好友;
已实现距离动态估计算法。
也可实现基于特征的非视距定位算法。
定位算法融合
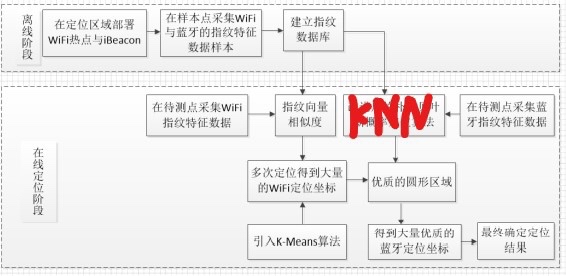
Wi-Fi定位、蓝牙定位、两者融合
ID:76100672753218961
顾家好Man

基于距离和非距离的定位算法是现代定位技术中的关键要素。在无线通信领域,RSSI(Received Signal Strength Indicator)是一种常用的定位指标,它通过测量信号的强度来估计发送端与接收端之间的距离。本文将探讨基于RSSI的定位算法,并介绍在MATLAB平台上的仿真实现。
首先,我们将介绍一种常用的基于RSSI的定位算法——扩展卡尔曼滤波(Extended Kalman Filter,EKF)。EKF是一种基于贝叶斯滤波理论的算法,利用状态转移方程和观测方程对目标进行定位。在RSSI定位中,状态转移方程描述了信号强度随距离变化的关系,观测方程则将真实距离与测量值之间的误差纳入考虑。通过迭代更新状态估计值和协方差矩阵,EKF可以实现对目标位置的估计。
另一种常用的基于RSSI的定位算法是无迹卡尔曼滤波(Unscented Kalman Filter,UKF)。与EKF相比,UKF通过选取一些代表性的样本点,实现对非线性系统的更好逼近。在RSSI定位中,UKF可以更准确地估计目标位置,并对传感器误差进行更精细的建模。
除了基于距离的定位算法,本文还将介绍一种基于模型拟合的定位方法。这种方法通过建立信号传播模型,利用已知位置和对应的RSSI值进行模型参数的拟合,从而实现目标位置的估计。模型拟合可以通过最小二乘法或其他优化算法来实现,具有较高的定位精度和稳定性。
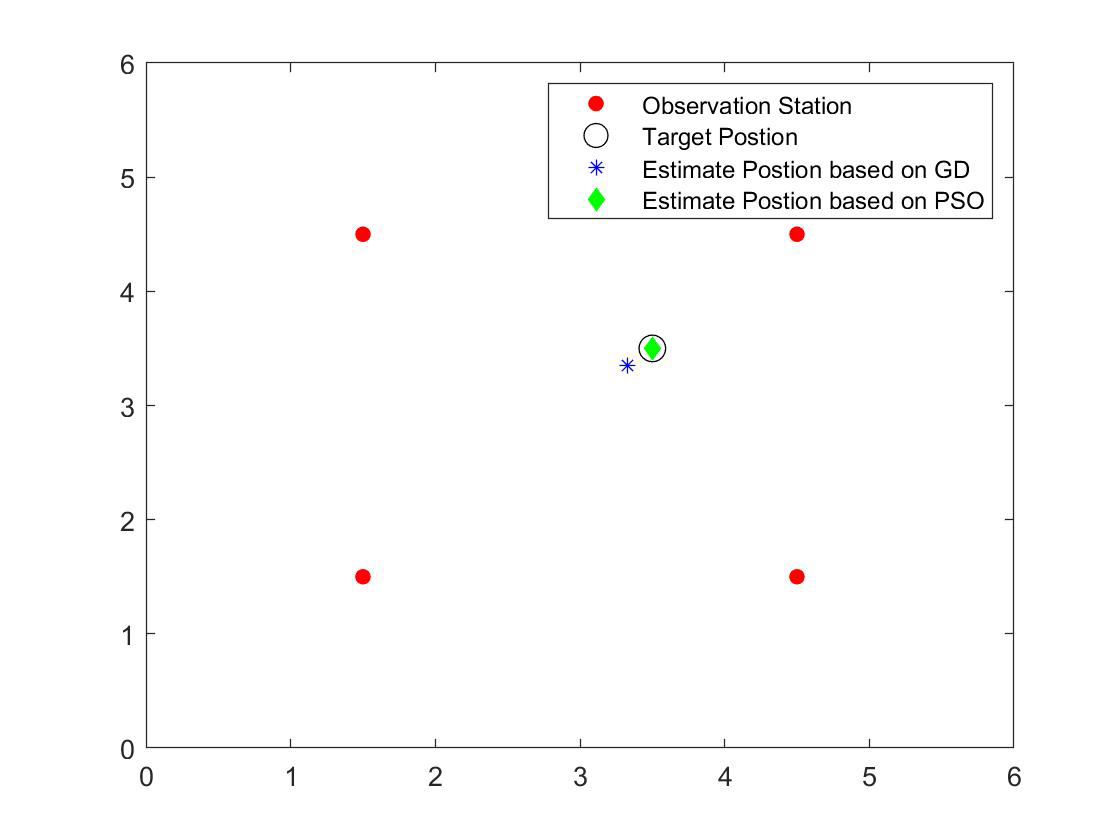
此外,本文还将讨论一种常用的三边定位方法。通过在目标周围设置三个基站,并测量目标到各个基站的距离,可以利用三边定位算法估计目标位置。三边定位算法简单易用,适用于小范围的定位需求。
为了进一步提高定位的精确度和稳定性,本文还将介绍定位算法融合的方法。通过将Wi-Fi定位和蓝牙定位的结果进行融合,可以有效降低定位误差和提高定位成功率。融合算法可以利用加权平均、卡尔曼滤波等方法来实现,具有较高的定位精度和抗干扰能力。
综上所述,基于距离和非距离的定位算法在无线定位领域具有广泛的应用前景。本文介绍了基于RSSI的定位算法的MATLAB实现,包括扩展卡尔曼滤波、无迹卡尔曼滤波以及模型拟合和三边定位等方法。在实际应用中,我们还可以进一步优化和创新RSSI算法,实现动态距离估计和基于特征的非视距定位。通过定位算法的融合,我们可以更加准确地估计目标位置,满足不同场景下的定位需求。
如果你对RSSI定位算法的优化和创新感兴趣,请添加我为好友,我们可以进一步深入讨论和交流。我已经实现了距离动态估计算法,并可以在Wi-Fi定位和蓝牙定位之间进行融合,欢迎交流和分享思路。
以上是对基于距离和非距离的定位算法的简要介绍,希望对读者有所启发和帮助。如果你对此有任何疑问或想法,请随时与我联系。谢谢!
以上相关代码,程序地址:http://matup.cn/672753218961.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









