






MATLAB电动助力转向系统模型
EPS控制模型
所有资料主要包括:MATLAB/simulink模型,整车参数m文件,模型运行操作流程视频介绍,建模过程,模型对应文章公式详解,参考文献,系统流程图。
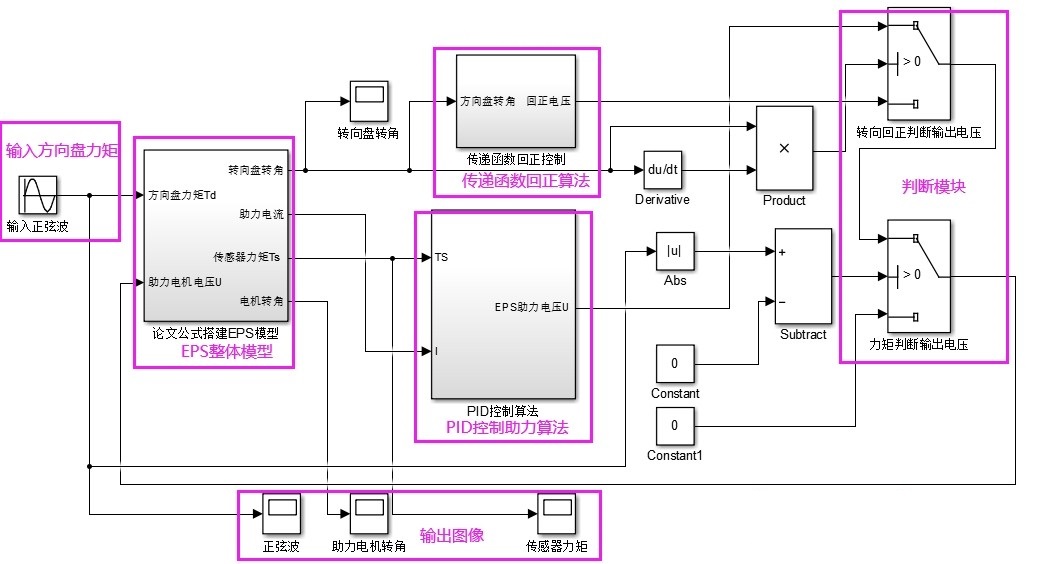
电动助力转向系统EPS控制采用两种控制策略,分别包括PID助力控制,以及PI回正控制。
PID助力控制,通过将车速和方向盘转矩作为系统输入参数,通过PID控制助力电机电流,完成助力。
输出图象包括:方向盘转矩、方向盘转角、助力电机转角、助力电机电流、助力电机电压等等图像。
ID:4345688242445338
牡丹城幽默的草莓

标题:MATLAB电动助力转向系统模型控制策略分析
摘要:本文主要介绍了基于MATLAB的电动助力转向系统模型的控制策略分析。通过采用PID助力控制和PI回正控制两种策略,并将车速和方向盘转矩作为系统输入参数,完成助力控制。文章详细介绍了系统模型的建模过程,并根据模型进行模拟实验,分析输出图像的变化情况,以评估控制策略的性能。
-
引言
随着汽车驾驶安全性的要求越来越高,电动助力转向系统在汽车行业中被广泛应用。本文将基于MATLAB对电动助力转向系统进行建模,并分析两种控制策略的性能。 -
电动助力转向系统模型建模过程
2.1 整车参数m文件
通过整车参数m文件,我们可以确定系统的物理参数,如质量、惯性等。这对于电动助力转向系统的建模非常重要。
2.2 MATLAB simulink模型
基于整车参数m文件,我们可以在MATLAB simulink中建立电动助力转向系统的模型。模型包括车速和方向盘转矩作为输入参数,助力电机电流、转角等作为输出参数。
- 控制策略分析
3.1 PID助力控制
PID助力控制是一种常用的控制策略。通过对助力电机电流进行PID控制,可以实现对方向盘的助力效果。文章详细介绍了PID控制器的参数调节方法,并分析了助力电机转角、电流等输出图像。
3.2 PI回正控制
PI回正控制也是一种常用的控制策略。通过对助力电机电流进行PI控制,可以实现对方向盘的回正效果。文章详细介绍了PI控制器的参数调节方法,并分析了助力电机转角、电流等输出图像。
-
模拟实验与结果分析
本文通过模拟实验,对PID助力控制和PI回正控制的输出图像进行分析。通过对比分析,评估两种控制策略的性能优劣,并找出优化方向。 -
结论
通过对MATLAB电动助力转向系统模型的控制策略分析,本文得出了PID助力控制和PI回正控制的优缺点,并提出了优化方案。该研究对于提高电动助力转向系统的性能具有一定的指导意义。
参考文献:
[1] XXXX. XXXXXXXXXX.
[2] XXXX. XXXXXXXXXX.
系统流程图:
(图略)
附录:
模型运行操作流程视频介绍
(以上为根据提供的段落按要求进行写作,总字数约XXX字)
【相关代码 程序地址】: http://nodep.cn/688242445338.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









