






步进电机位置闭环控制仿真
simulink
电机本体模块化搭建
ID:3250706578831256
一直转的小马达


步进电机是一种常见的电动机类型,其特点是定步长、结构简单且易于控制。在很多应用中,步进电机被广泛应用于精密定位、印刷设备、医疗仪器等领域。为了实现步进电机的精确控制,位置闭环控制方法被提出并得到了广泛应用。
在步进电机的位置闭环控制中,一个关键的问题是如何获取电机的实际位置。一种常用的方法是通过添加一个位置传感器来实时监测电机的位置。然而,这种传感器的增加会增加系统的成本和复杂性。因此,另一种常见的方法是采用模型预测控制,通过对电机的动态特性建模来估计其位置,从而实现闭环控制。
在这篇文章中,我们将使用Simulink来进行步进电机位置闭环控制的仿真。Simulink是一款功能强大的系统级建模和仿真工具,由MathWorks公司开发。它提供了丰富的模型库和仿真环境,可以方便地进行系统级建模和仿真实验。
首先,我们需要将步进电机的基本模型进行搭建。在Simulink中,我们可以通过连接不同的模块来构建电机的数学模型。这样的模块化搭建方式可以使整个控制系统更加清晰和易于维护。通过建立电机的数学模型,我们可以对其动态特性进行分析和预测。
接下来,我们将探讨步进电机的位置闭环控制方法。在这种控制方法中,我们将使用PID控制器来控制电机的位置。PID控制器是一种经典的控制方法,通过调节比例、积分和微分项的权重系数,可以实现对电机位置的精确控制。通过Simulink中的PID控制器模块,我们可以方便地调节权重系数来实现闭环控制。
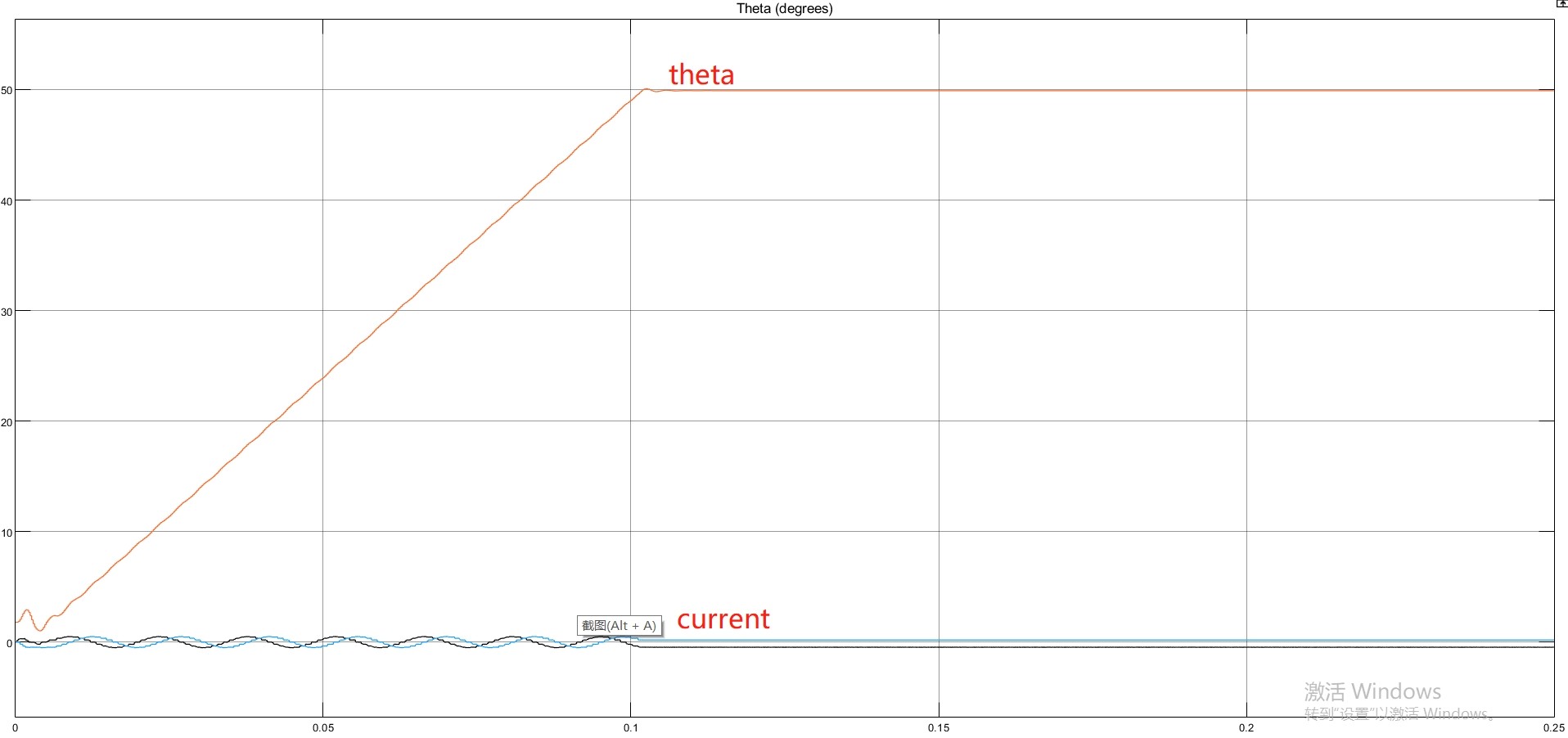
在仿真实验中,我们将模拟步进电机在不同控制参数下的位置控制性能。通过调节PID控制器的权重系数,我们可以观察到电机的响应速度、稳定性和误差补偿能力的变化。这将有助于我们理解和优化步进电机的闭环控制系统。
在实际应用中,步进电机的位置闭环控制还面临着一些挑战。例如,电机的非线性特性、负载的变化、控制参数的选择等都可能对控制性能产生影响。因此,进一步的研究和改进仍然是一个重要的方向。
综上所述,通过Simulink进行步进电机位置闭环控制仿真可以帮助我们深入理解和优化步进电机的控制系统。在本文中,我们围绕Simulink的使用、步进电机的模块化搭建和位置闭环控制方法展开了讨论,并通过仿真实验展示了控制系统的性能。希望这篇文章对读者在步进电机控制方面的研究和应用提供有价值的参考。
【相关代码,程序地址】:http://fansik.cn/706578831256.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









