






摘 要
随着经济和科技的发展,机械手是我国的一种新型的工业产品,是在进行工业机械化以及生产自动化装备的过程中,逐步开发出来的。结合大学相关专业学生的相关理论知识,对机械手的各个部件进行了改造与分析,并利用plc控制,设计出一种4自由度的罐装饮料搬运机械手搬运机构。本文主要研究以上内容:
在分析其工作原理的基础上,利用所学知识设计出一种满足选题审题表要求的罐装饮料搬运机械手,它的创新之处体现在可以在适应的工作环境下夹持不同形状的物体,同时可以满足随时进行拆除安装的功能, 根据要求对其展开方案设计,大致过程是对各个模块的功能进行合理的划分,并对其进行优化配置,同时对多种软硬件系统进行综合考虑,针对上述问题,最后确定出具体的设计方案。应用 CAD等软件,对其四个自由度所对应物件进行绘制。从环境,成本,效率等多方面考虑,本装置具有较强的适应性和可便利性。
关键词:夹持;驱动;搬运机构;搬运机械手
设计框架
摘 要............... I
Abstract....... II
第 1 章 绪 论............... 1
1.1课题的背景.... 1
1.2课题的目的及意义.... 2
1.3机械手国内外发展趋势....2
1.4本文的主要研究内容.. 5
第2章 罐装饮料搬运机械手总体方案设计..... 6
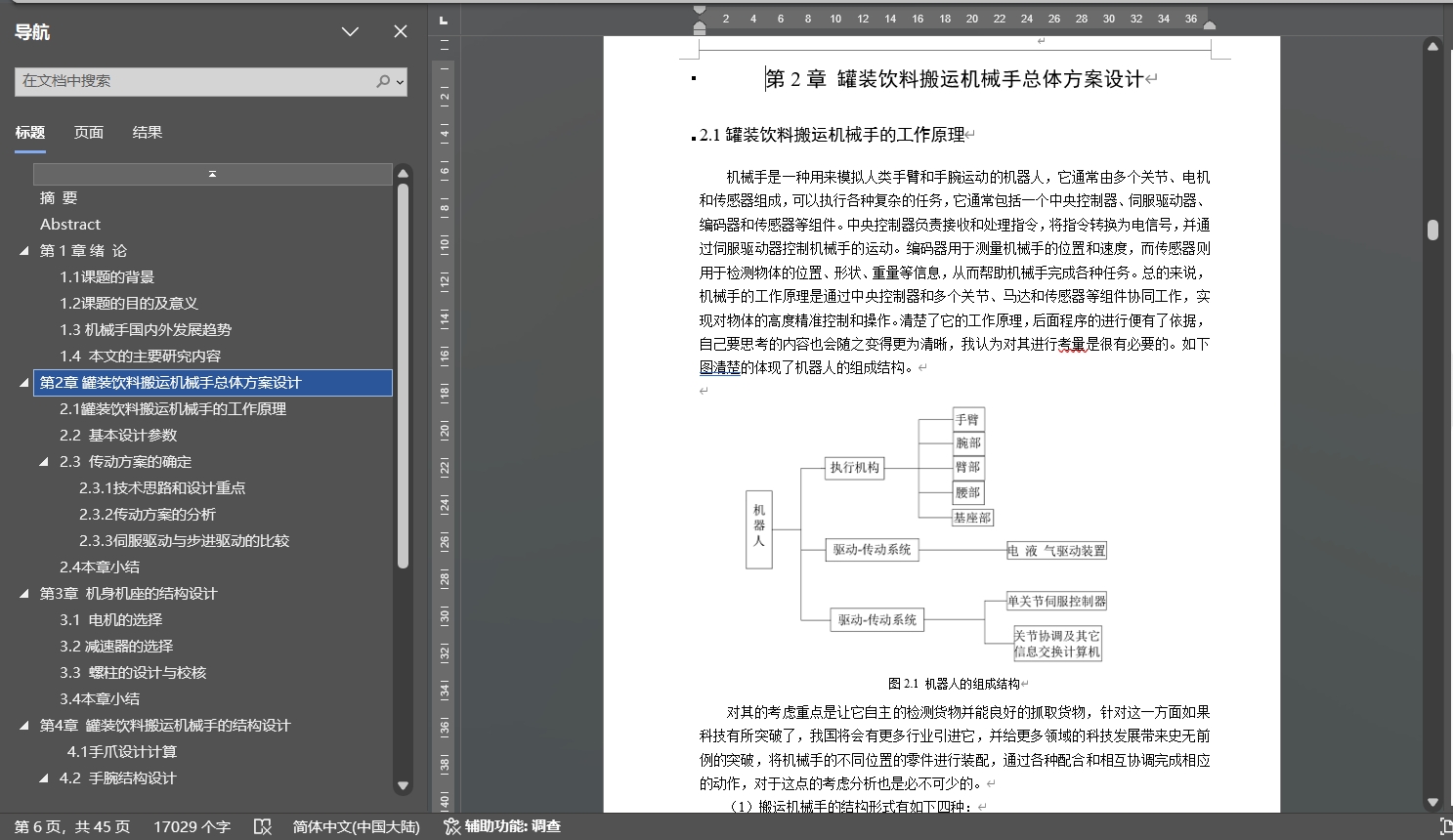
2.1罐装饮料搬运机械手的工作原理....... 6
2.2基本设计参数.......... 9
2.3传动方案的确定...... 11
2.3.1技术思路和设计重点... 11
2.3.2传动方案的分析........14
2.3.3伺服驱动与步进驱动的比较... 16
2.4本章小结...... 16
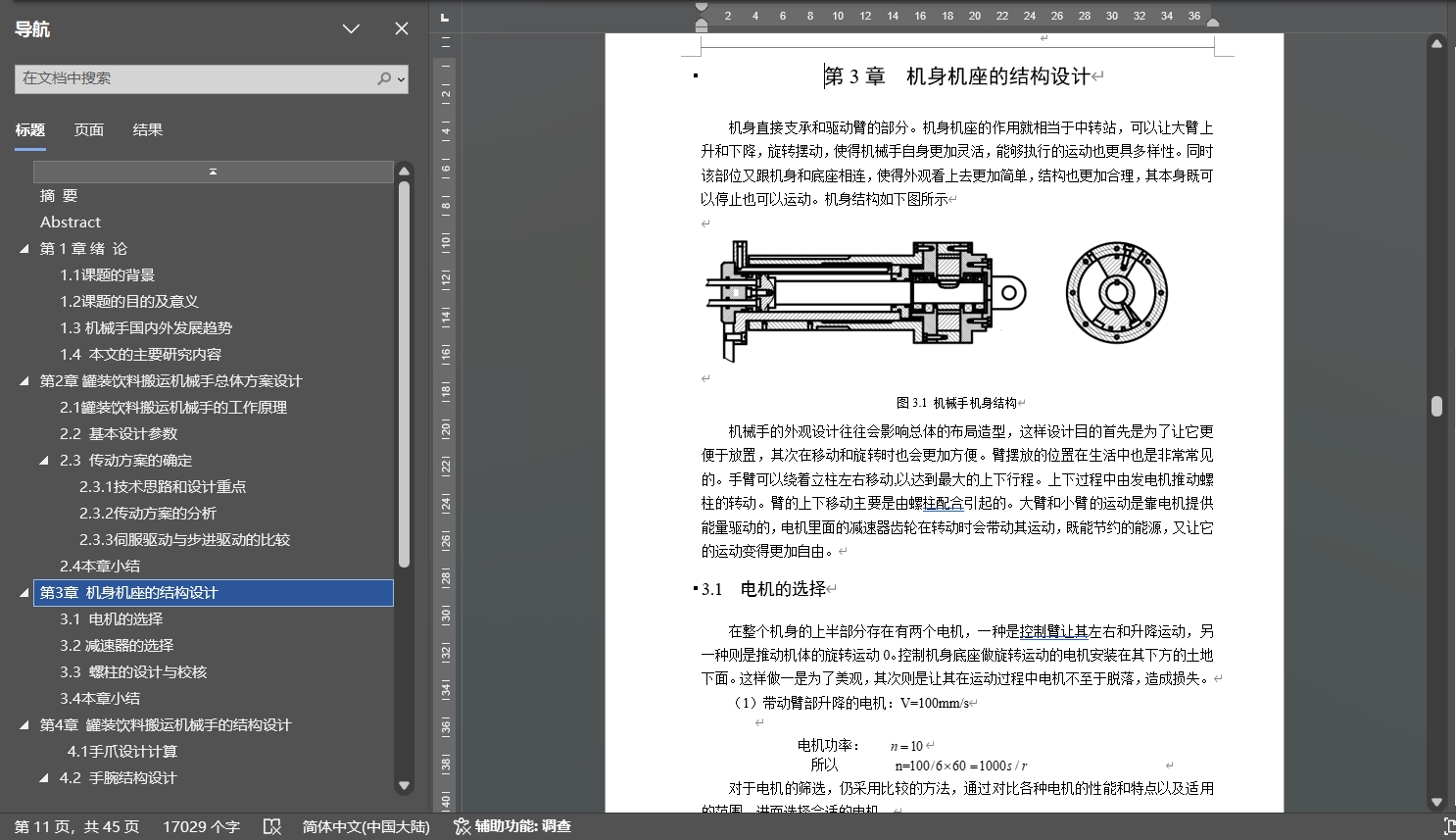
第3章 机身机座的结构设计...... 17
3.1电机的选择....... 17
3.2减速器的选择......... 18
3.3螺柱的设计与校核. 19
3.4本章小结..... 20
第4章 罐装饮料搬运机械手的结构设计.... 21
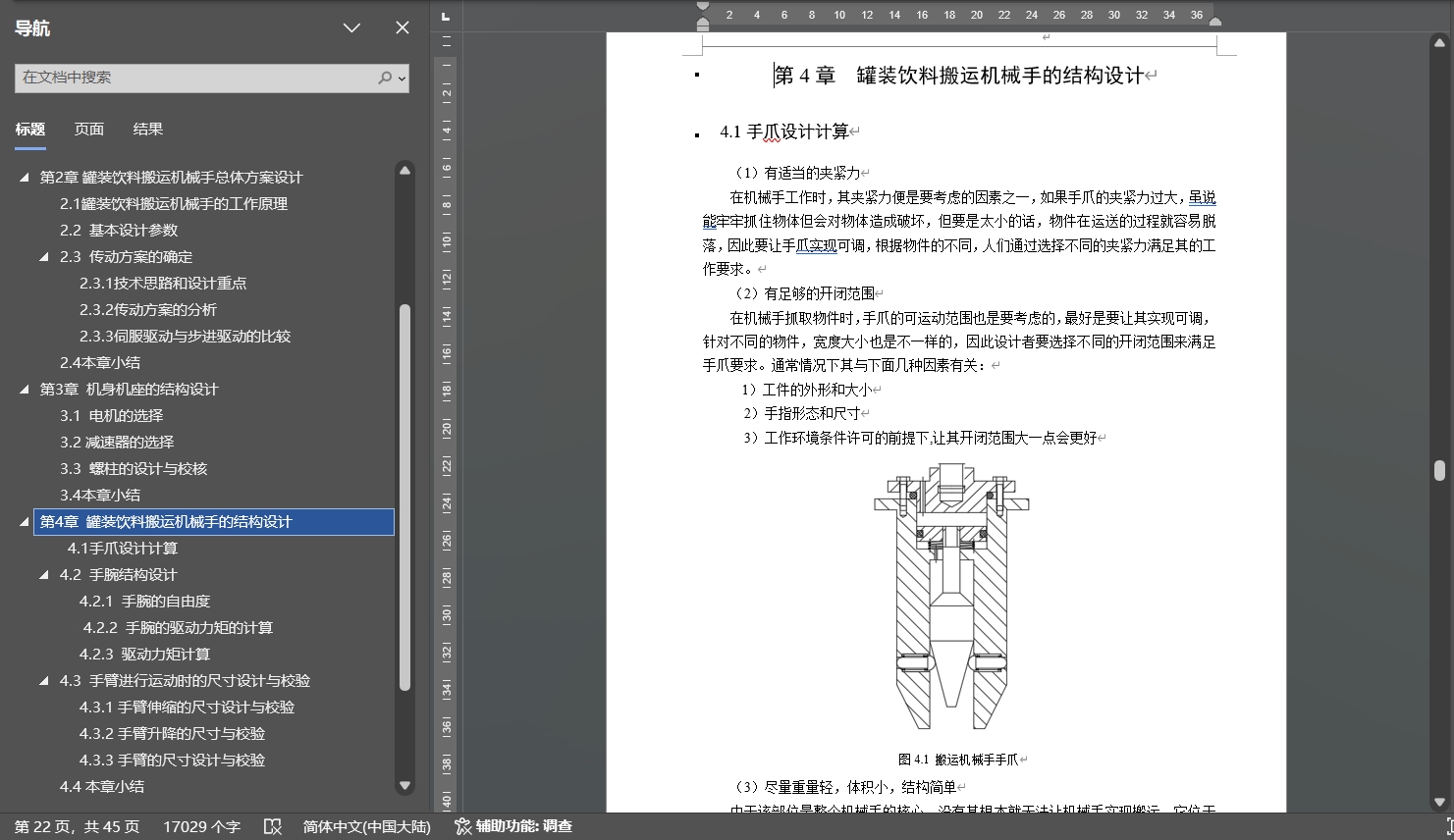
4.1手爪设计计算......... 21
4.2手腕结构设计... 23
4.2.1手腕的自由度......... 23
4.2.2手腕的驱动力矩的计算...... 23
4.2.3驱动力矩计算........ 25
4.3 手臂进行运动时的尺寸设计与校验.... 26
4.3.1 手臂伸缩的尺寸设计与校验..... 26
4.3.2 手臂升降的尺寸与校验.... 28
4.3.3 手臂的尺寸设计与校验......... 29
4.4 本章小结.......... 31
第5章 机械手PLC控制系统设计.. 32
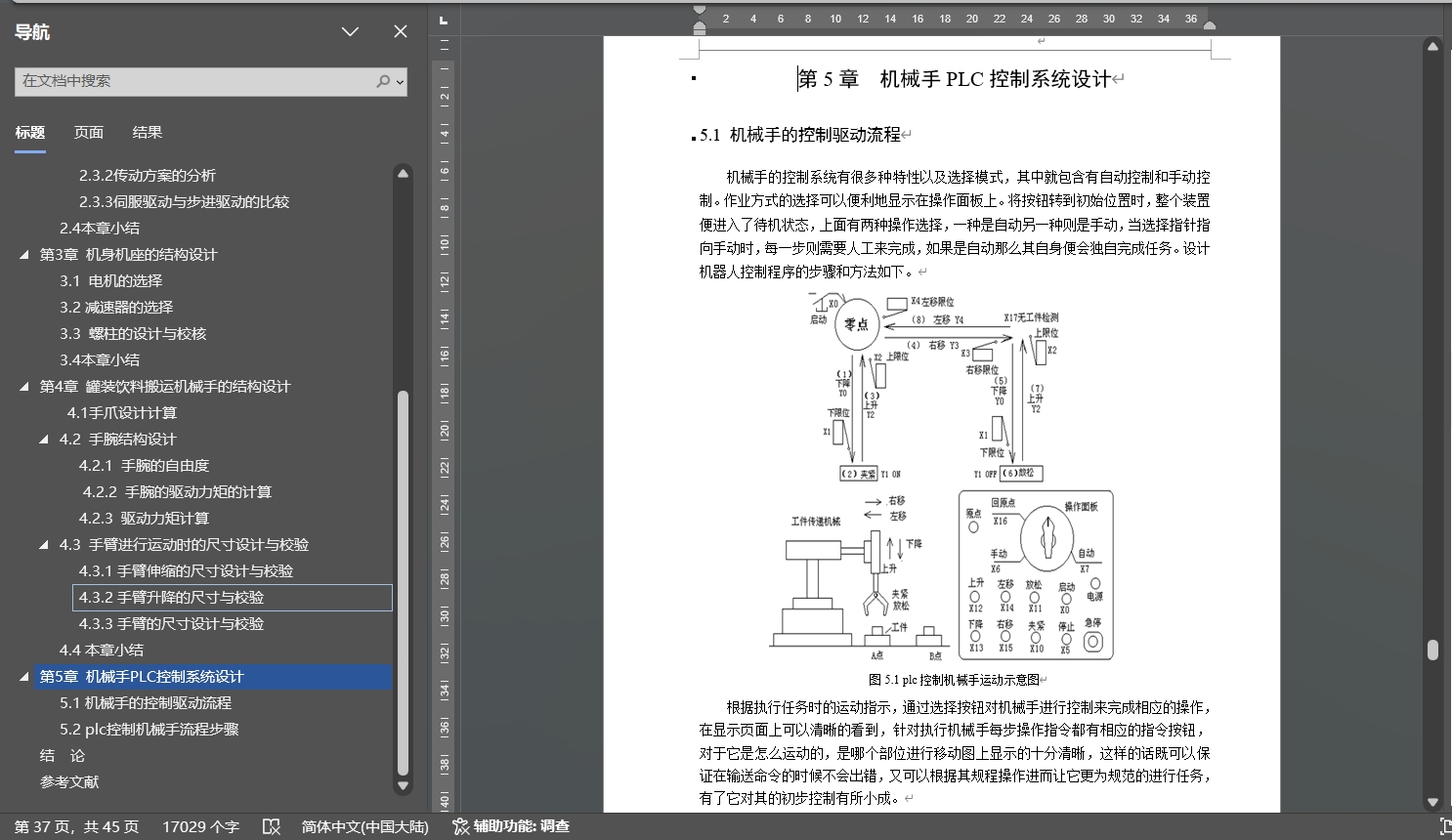
5.1机械手的控制驱动流程........ 32
5.2 PLC控制机械手流程步骤..34
结 论............ 38
参考文献..................... 39
第一章
第二章
第三章
第四章
第五章
结论
参考文献
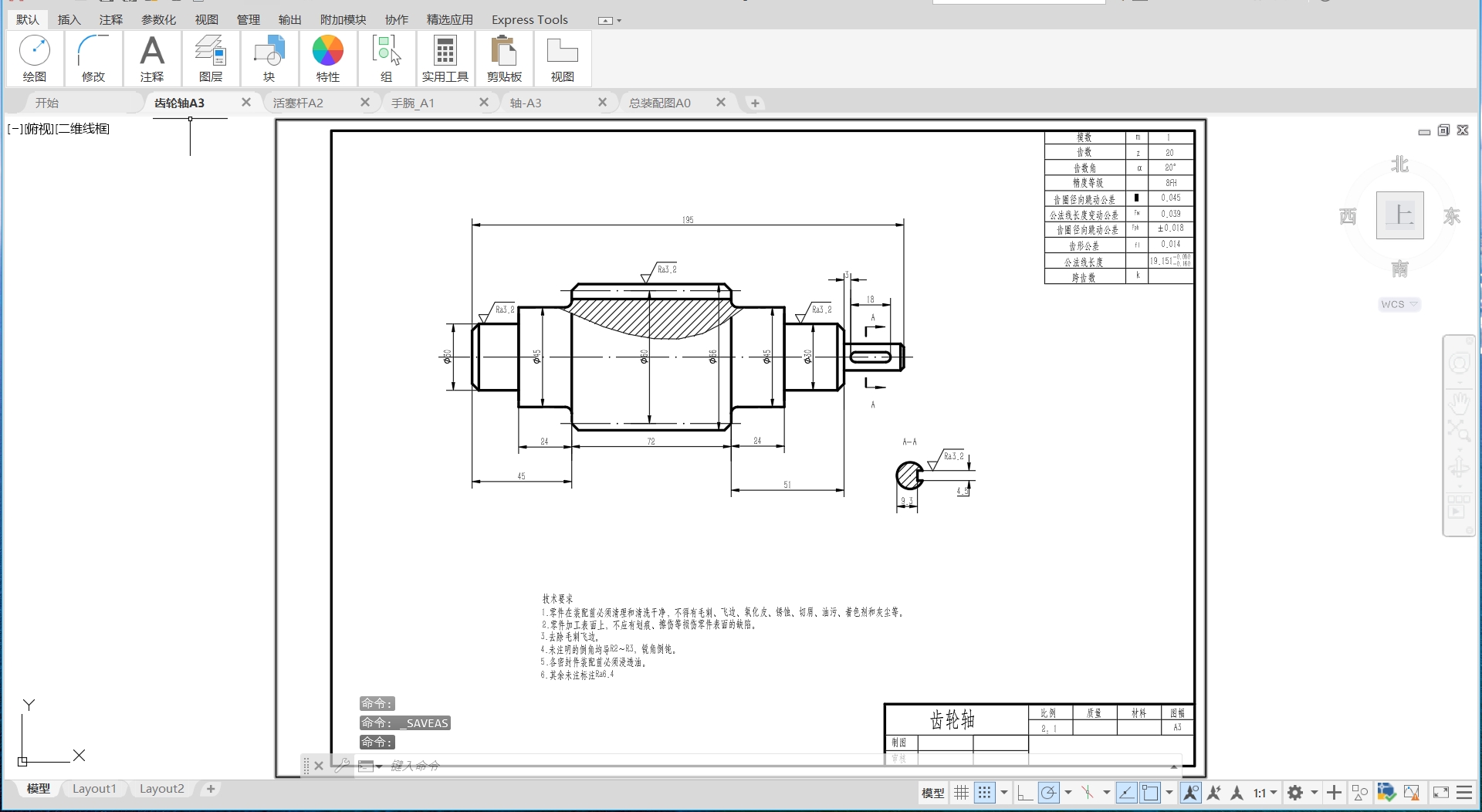
齿轮轴A3.dwg
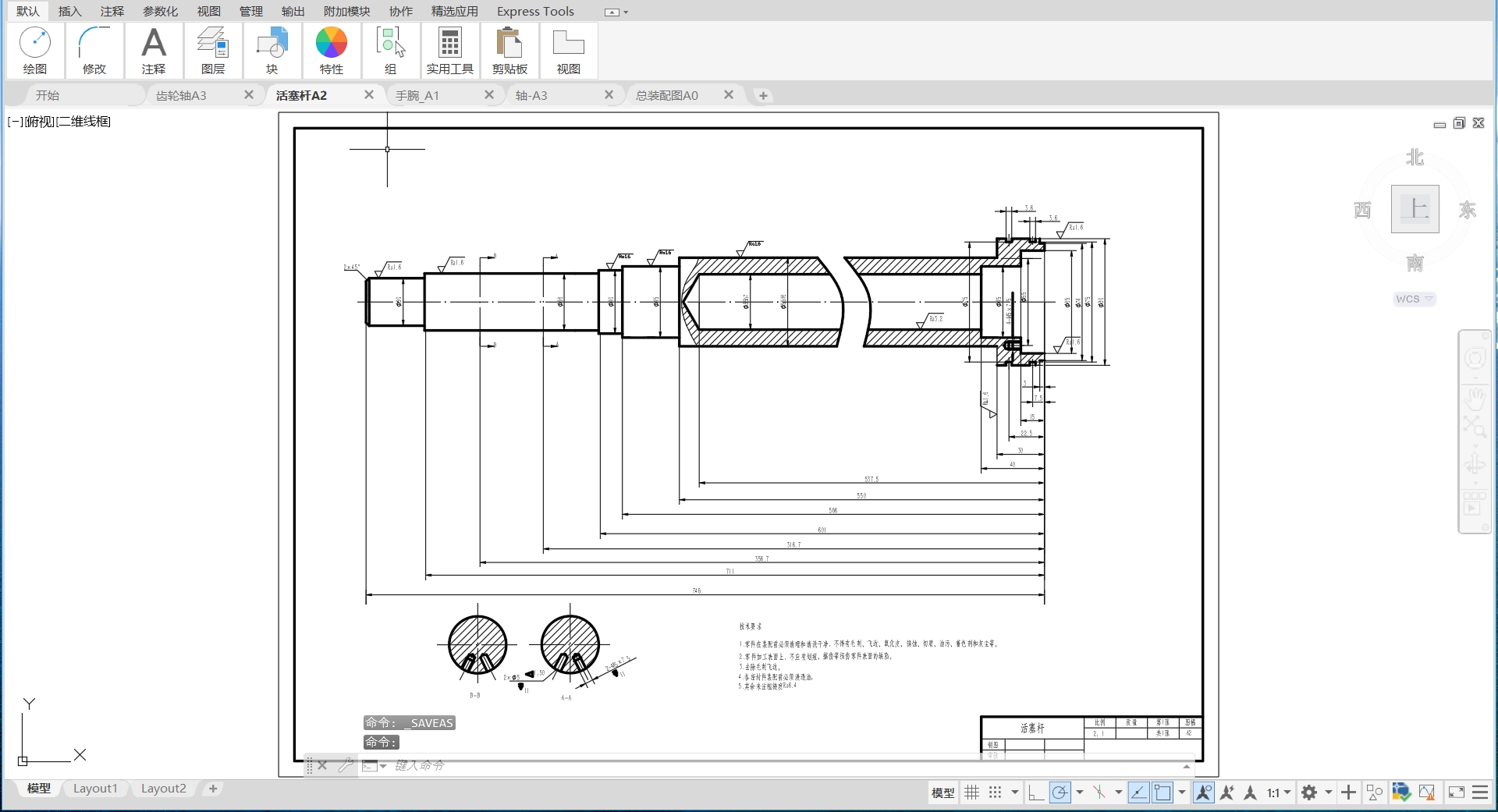
活塞杆A2.dwg
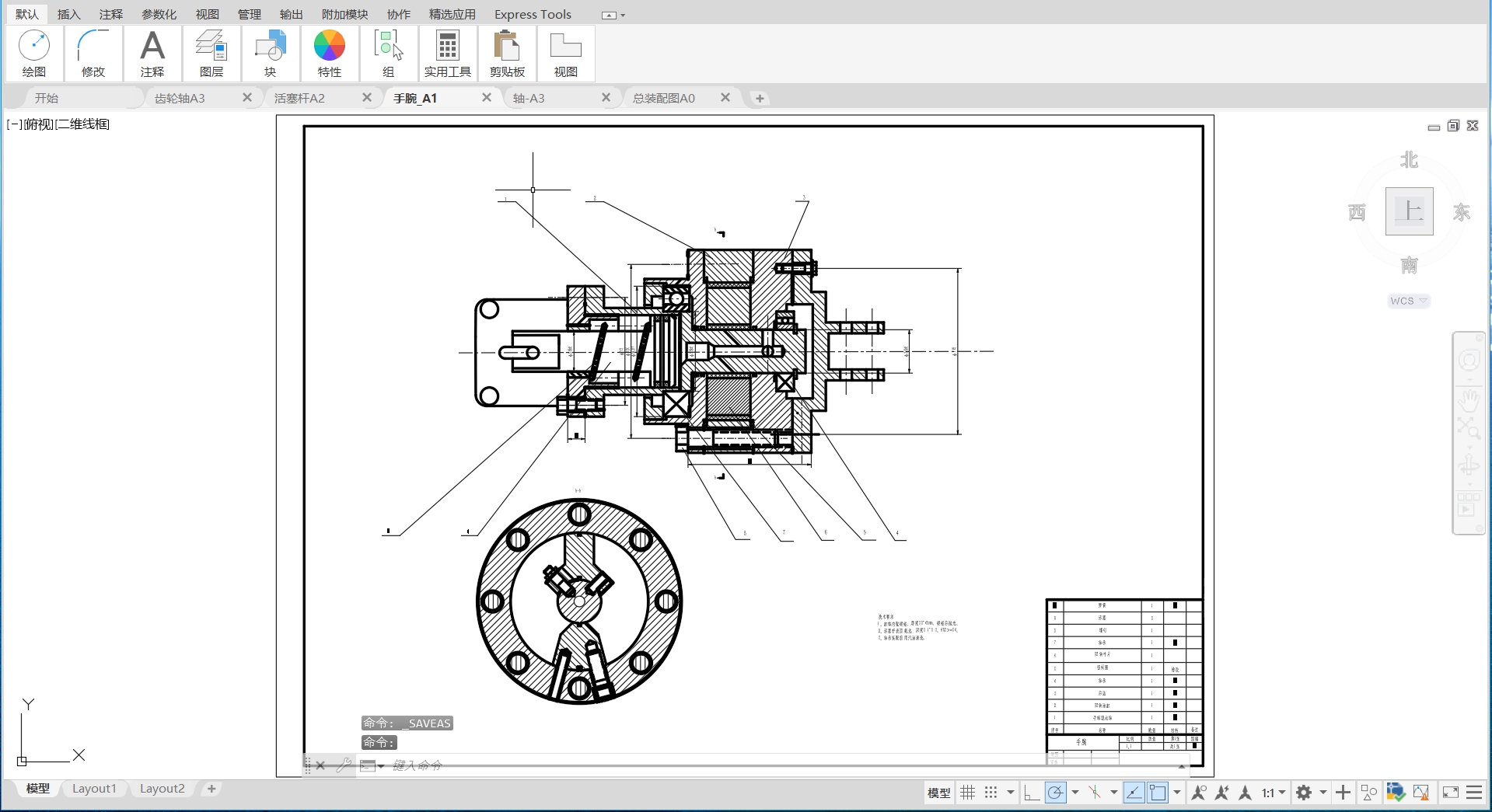
手腕 A1.dwg
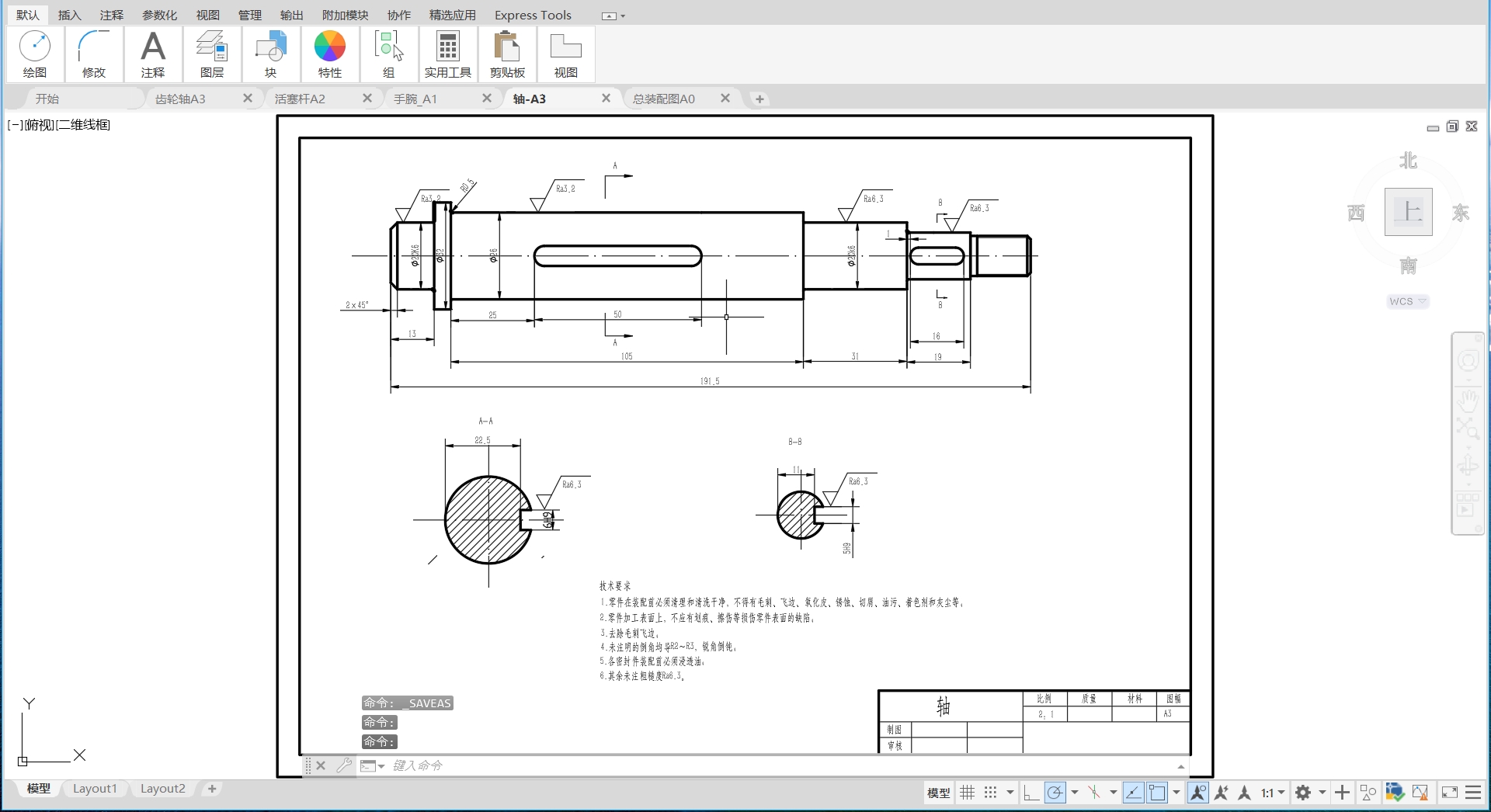
轴-A3.dwg
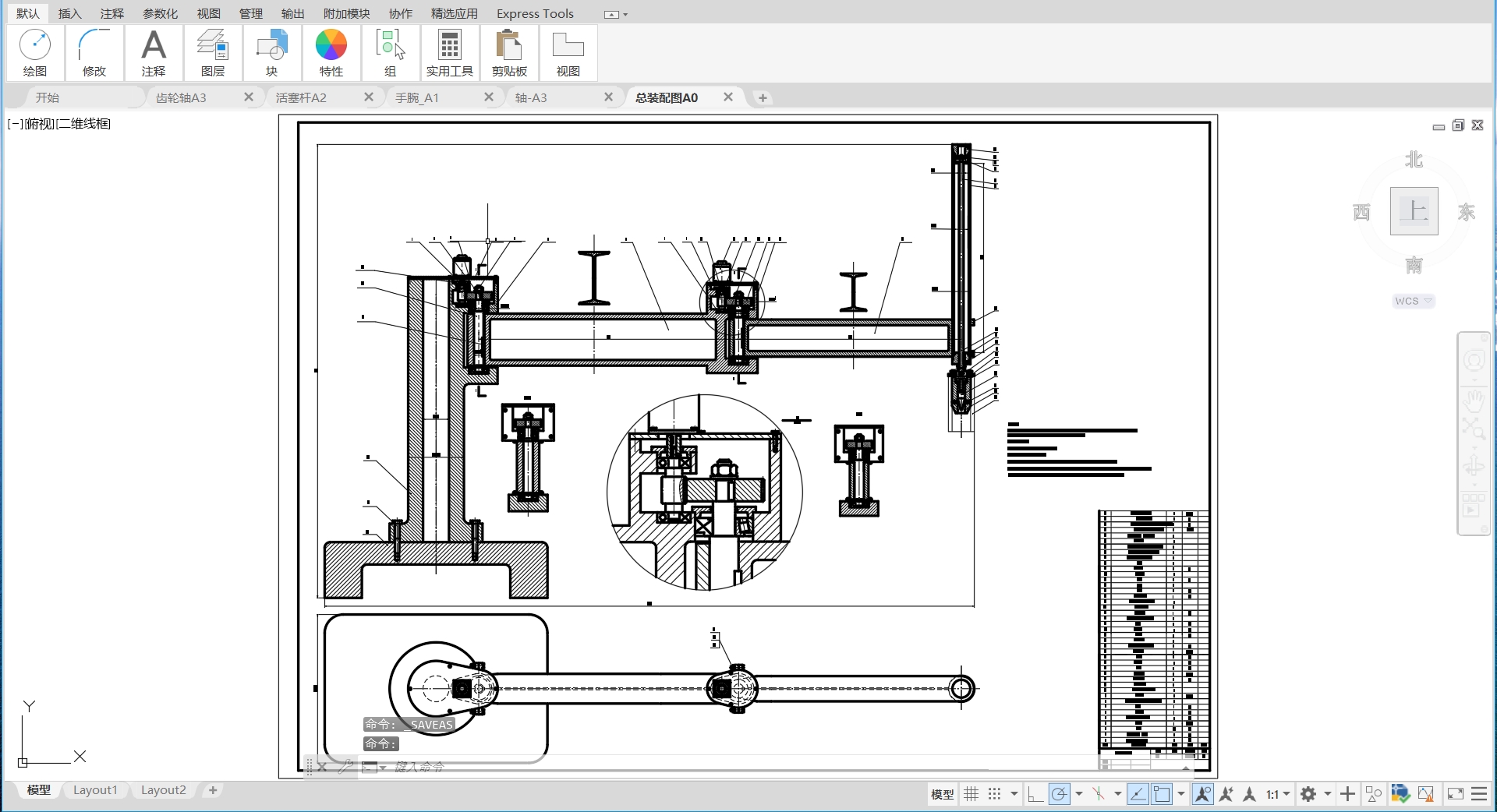
总装配图A0.dwg


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









