






几十套模型预测控制MPC相关matlab程序代码simulink+文档
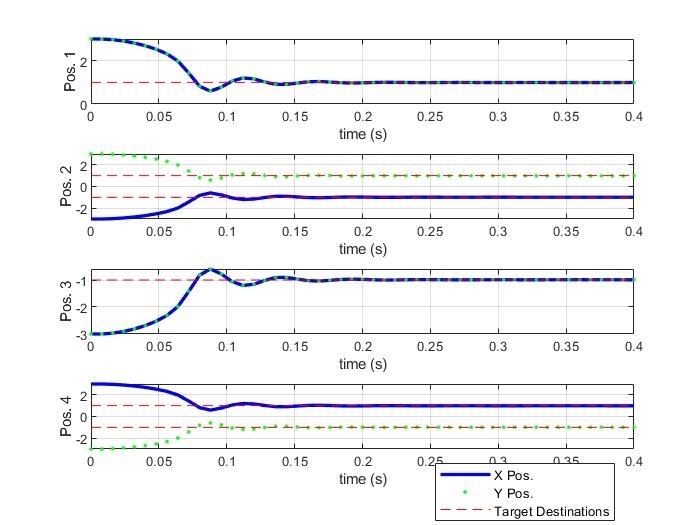
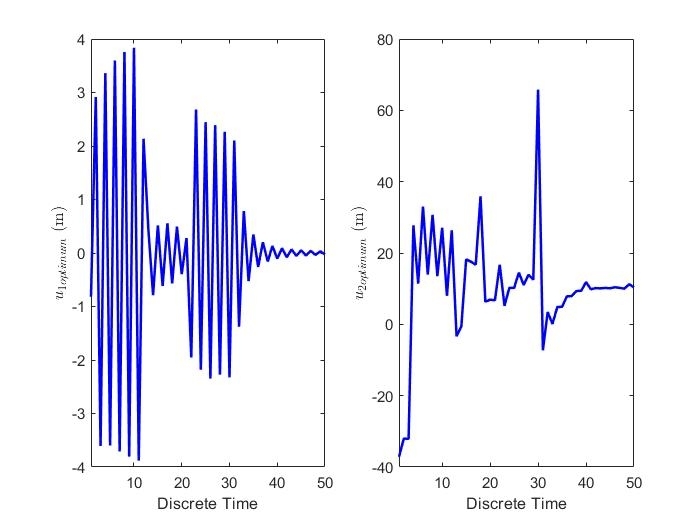
1、基于Koopman模型预测控制的非线性流控制的数据驱动框架
2、一种用于非线性模型预测控制的并行优化工具包(NMPC)
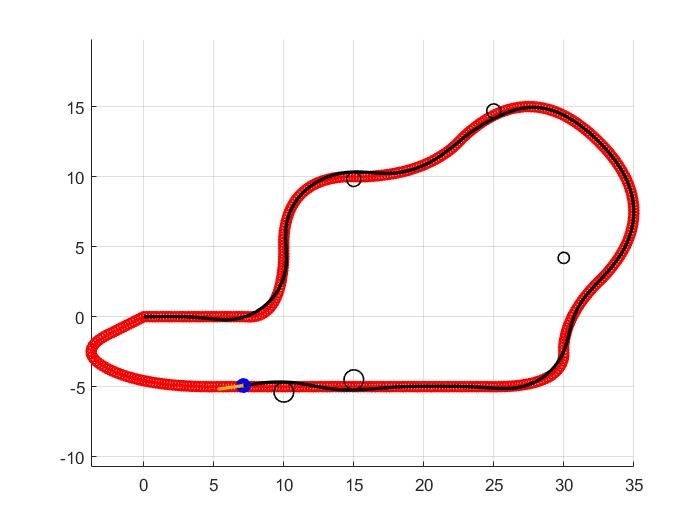
3、基于运动学车辆模型的开放式驾驶MPC横向控制算法
4、移动机器人路径跟踪的设计与仿真模型预测控制
5、基于ACADO工具包的自主车道跟踪和避障车辆的模型预测控制
6、分层MPC控制器的实时车辆优控制和避障
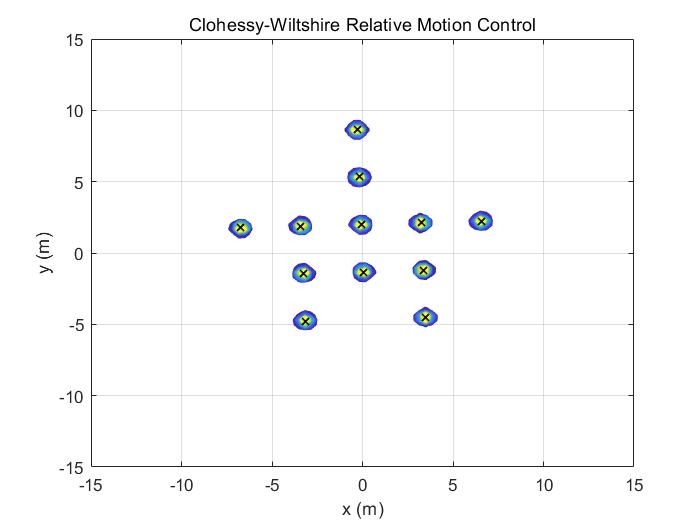
7、利用随机有限集理论对蜂群的ILQR和MPC控制
8、具有飞行约束的无人机MPC
9、MPC在美国高速公路场景中移动的车辆上的实现
10、带挂载的四轴飞行器的MPC
11、基于MPC的仿真轨迹跟踪模块
12、非线性casadi模型预测控制
13、模型预测控制(MPC)基准测试问题的开放集合
14、轨迹优化和非线性模型预测控制(MPC)工具箱
15、过程控制代码,包括优化、模型预测控制(MPC)、移动视界、卡尔曼滤波器等
16、非线性弹簧质量系统的简单模型预测控制(MPC)
17、输出LC滤波器三相逆变器模型预测控制(MPC)仿真
18、低数据极限下模型预测控制的非线性动力学的稀疏识别
19、连续线性化模型的预测控制
20、MPC在美国高速公路场景中移动的车辆上的实现
21、四轮车辆轨迹规划
22、基于模型预测控制的车辆路径跟踪
23、基于MPC的永磁同步电机非线性终端滑模控制仿真研究
24、文档+程序 ee498风力发电机组模型预测控制应用项目。
对机器的定子侧进行电流控制。
dq框架用于简单性
25、文档+程序 基于模型预测控制的自动避障和汽车跟踪
26、文档+程序 多篇RMPC 鲁棒模型预测控制
27、文档+程序 USV的自动驾驶模型预测控制
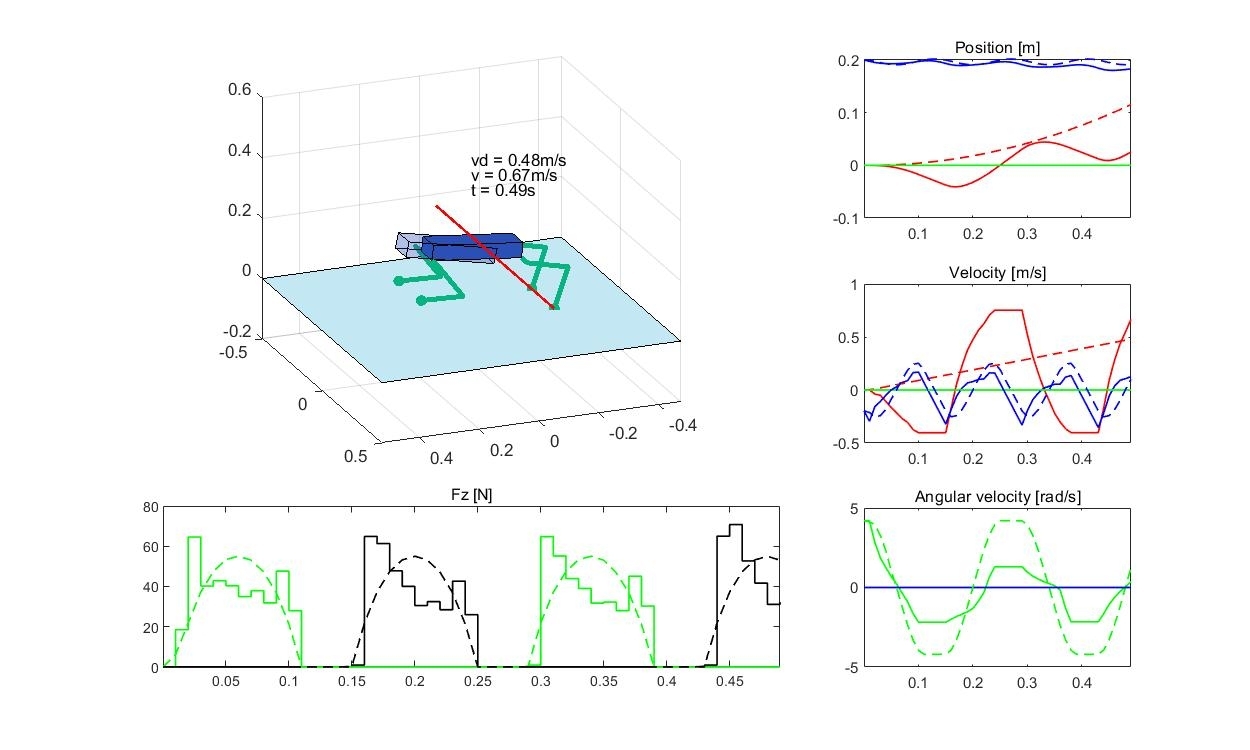
28、文档+程序 动态四足机器人的自由模型预测控制
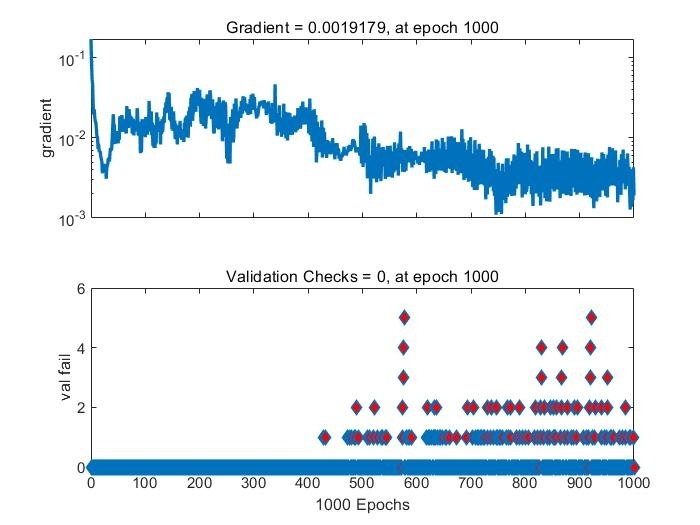
29、文档+程序 基于学习的模型预测控制
30、文档+程序 具有参考跟踪的模型预测控制(MPC)来模拟火箭在火星上的着陆
31、文档+程序 无人驾驶汽车模型预测控制
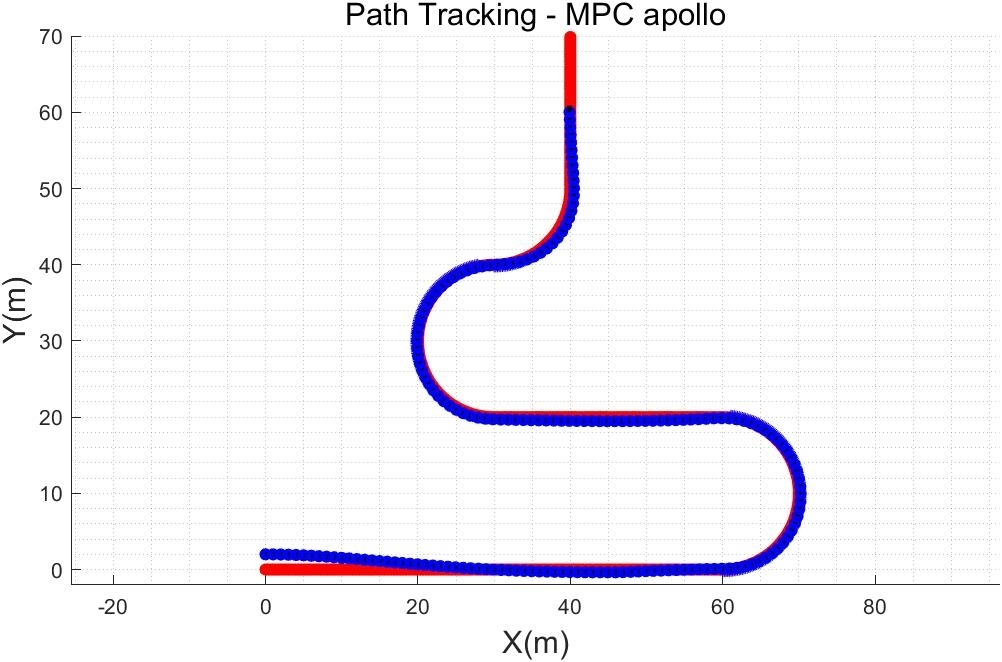
32、文档+程序 基于动态车辆模型的 Baidu Apollo lqr和mpc横向控制算法
33、文档+程序 读书笔记-无人驾驶车辆模型预测控制
34、文档+程序 基于在线优化的快速模型预测控制
35、文档+程序 避免车辆碰撞的网络模型预测控制的MATLAB仿真
36、文档+程序 具有输出LC滤波器的三相逆变器的前馈神经网络模型预测控制
价格说明
ID:4720682536204140
梳橙
标题:模型预测控制在自动驾驶中的应用研究
摘要:本文围绕模型预测控制(Model Predictive Control,MPC)在自动驾驶领域的应用展开研究。首先介绍了MPC的基本原理和特点,然后分析了MPC在非线性流控制、路径跟踪、避障等方面的具体应用。接着,结合实际案例,详细讨论了MPC在不同场景下的实现方法和效果,并分析了其优势和局限性。最后,对未来MPC在自动驾驶领域的发展趋势进行了展望。
关键词:模型预测控制;自动驾驶;非线性流控制;路径跟踪;避障
-
引言
自动驾驶技术的快速发展,为交通运输领域带来了巨大的变革。在实现车辆安全稳定行驶的同时,提高了驾驶效率和乘车舒适度。模型预测控制作为一种先进的控制策略,被广泛应用于自动驾驶系统中,为实现车辆的精确控制提供了有效手段。 -
模型预测控制基本原理与特点
2.1 模型预测控制的基本原理
模型预测控制通过建立车辆运动模型,并基于当前状态和一定时域范围内的未来状态进行优化,得到最优控制策略。其基本原理是将未来状态进行预测,并通过优化算法计算出当前最优的控制输入。
2.2 模型预测控制的特点
模型预测控制具有以下特点:灵活性强、适应性好、对非线性系统具有较好的控制性能、能够处理约束条件、能够优化多个目标等。这些特点使其在自动驾驶领域中得到了广泛应用。
-
模型预测控制在非线性流控制中的应用
非线性流控制是模型预测控制的一个重要应用方向。本节以基于Koopman模型的非线性流控制为例,介绍了其数据驱动框架和实际应用效果。 -
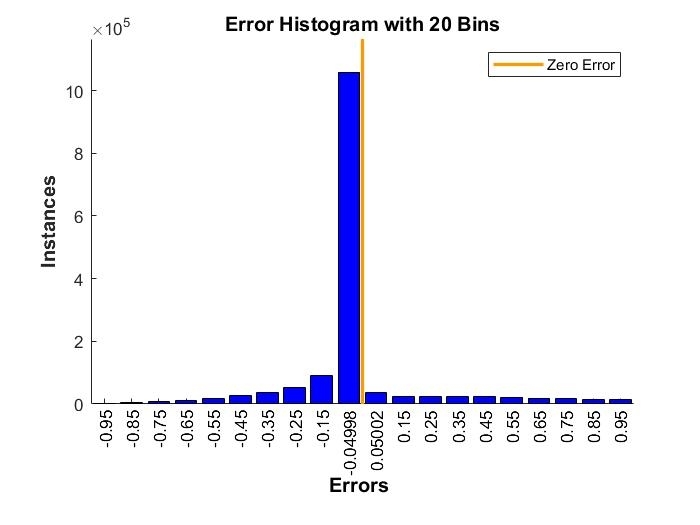
模型预测控制在路径跟踪中的应用
路径跟踪是自动驾驶中的核心技术之一。本节以基于运动学车辆模型的开放式驾驶MPC横向控制算法为例,详细讨论了MPC在路径跟踪中的应用原理和控制效果。 -
模型预测控制在避障中的应用
避障是自动驾驶中的重要问题之一。本节以基于ACADO工具包的自主车道跟踪和避障车辆的模型预测控制为例,分析了MPC在避障中的应用方法和效果,并讨论了其在真实场景中的实现挑战。 -
模型预测控制的优势与局限性
6.1 优势
模型预测控制具有精确度高、鲁棒性好、适应性强等优势。这些优势使其在自动驾驶系统中得到了广泛应用。
6.2 局限性
模型预测控制在计算复杂度和实时性等方面存在一定的局限性。同时,在复杂环境下的建模和约束条件的处理也是其面临的挑战。
- 模型预测控制在自动驾驶领域的发展趋势
未来,随着自动驾驶技术的不断发展,模型预测控制将面临更多的挑战和机遇。在智能化、自适应化、高效化等方面的发展,将进一步提高模型预测控制在自动驾驶系统中的应用效果。
结论:本文围绕模型预测控制在自动驾驶领域的应用进行了详细研究和分析。通过对非线性流控制、路径跟踪、避障等方面的具体应用案例进行讨论,总结了模型预测控制的优势与局限性,并对其在未来的发展趋势进行了展望。本文的研究旨在为自动驾驶技术的进一步发展提供参考和借鉴。
注:本文参考了相关文献和资料,但没有提供具体的参考文献和示例代码,仅为作者个人展开的研究与分析。
相关的代码,程序地址如下:http://fansik.cn/682536204140.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









