






作者丨派派星
来源丨CVHub
编辑丨极市平台
下载
首先,打开
OpenCV-MinGW-Build,找到对应的Releases版本。这里以OpenCV-4.5.5-x64 | zip | tar.gz为例,我们点击下拉键Configuration:
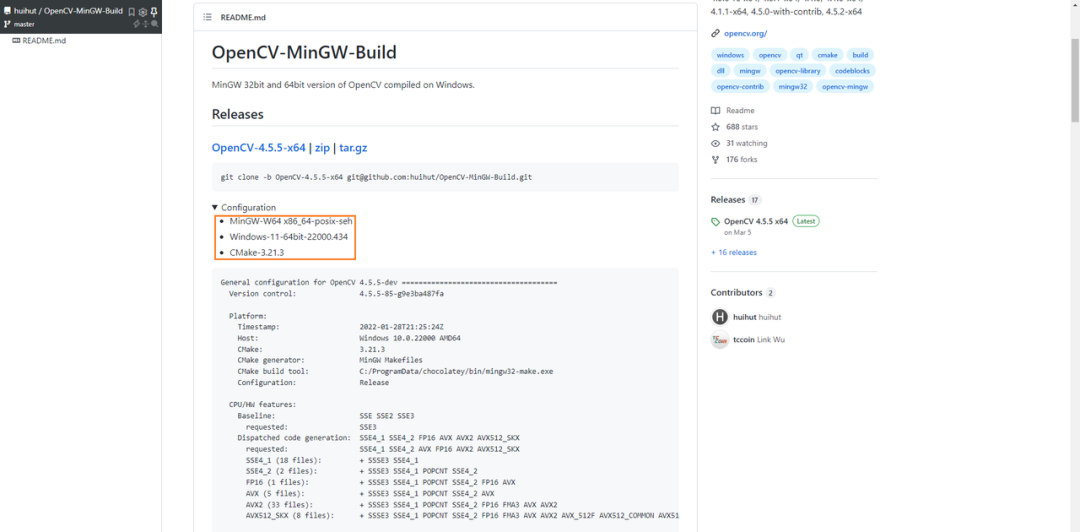
下载并解压红色方框除操作系统外对应的两个软件:
MinGW-W64 x86_64-posix-seh【下载最新版本即可】Windows-11-64bit-22000.434【Windwos 10也适配】CMake-3.21.3【一定要下载对应的版本,否则大概率会编译失败】
下载时有条件的建议搭梯子,负责下行速度很慢。
安装
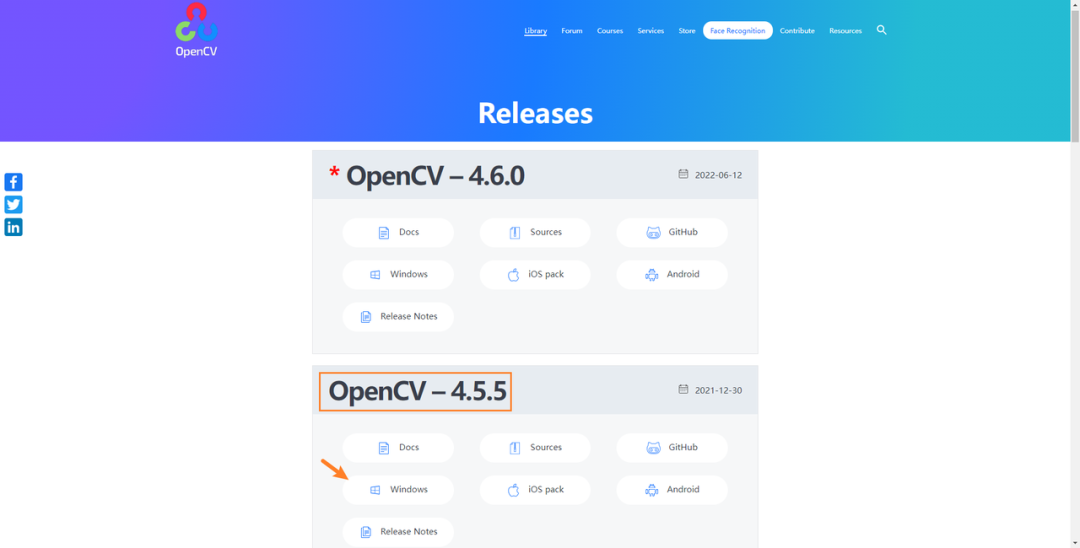
OpenCV-4.5.5-x64安装包:
点击对应链接下载;
双击解压;
选择解压路径,如
C:\opencv;

此处我的安装路径为:
C:\cmake-3.21.3-windows-x86_64
C:\opencv\opencv
C:\mingw64
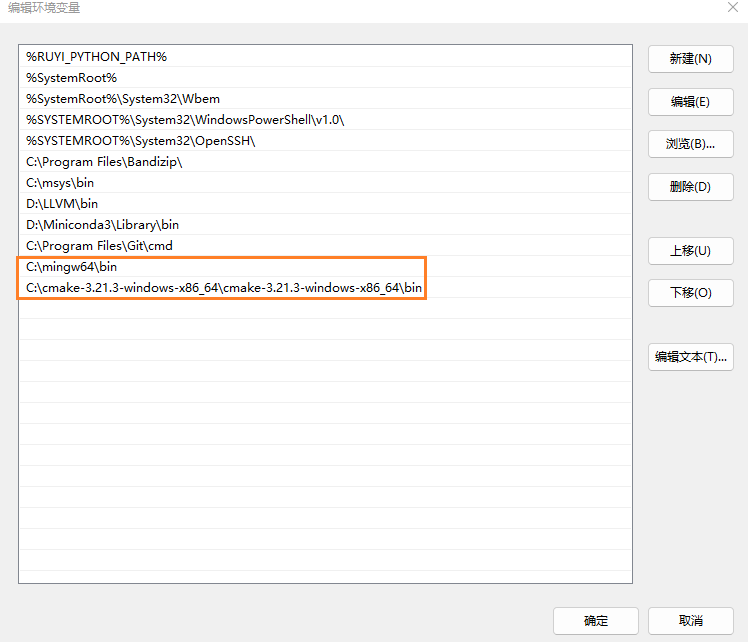
设置环境变量
添加环境变量
激活环境变量
进入cmd,输入set path=test;
退出cmd,重新进入
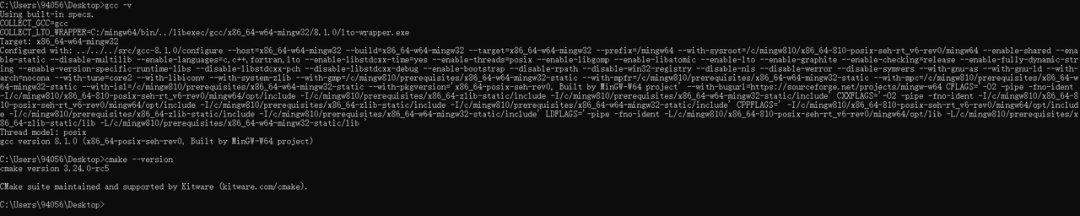
检查是否成功
编译
注意:编译过程有条件的尽量开
vpn,否则编译过程中涉及相关软件下载可能会很慢甚至失败。注意:编译过程有条件的尽量开vpn,否则编译过程中涉及相关软件下载可能会很慢甚至失败。
打开
cmake-gui.exe,文件存放在C:\cmake-3.21.3-windows-x86_64\cmake-3.21.3-windows-x86_64\bin目录下;输入
source code地址或者点击Browse Source选项选择对应的source路径;输入
build存放地址,可自己建立文件夹存放;
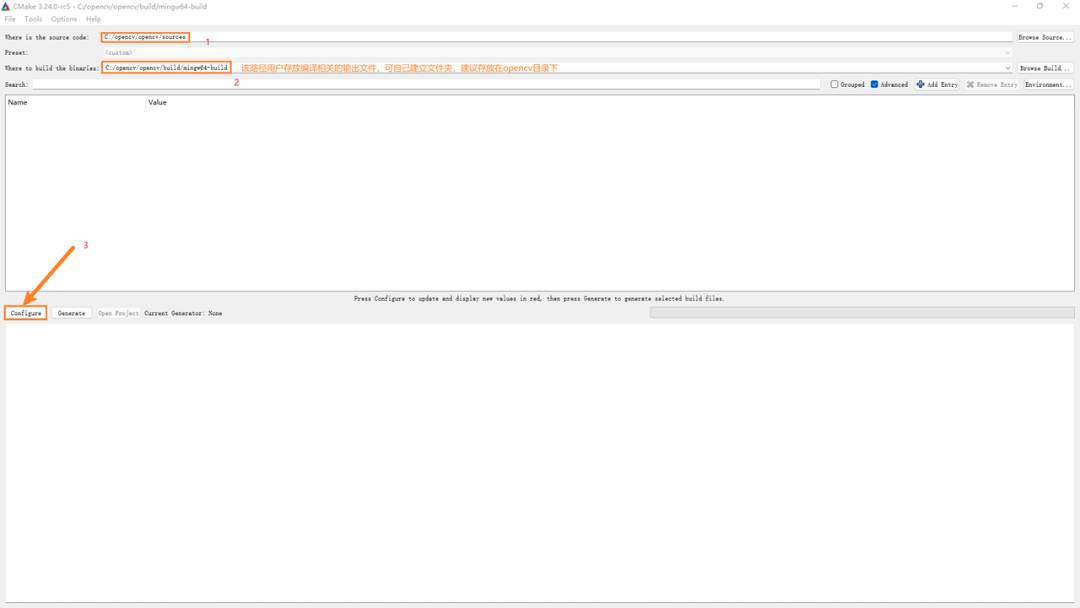
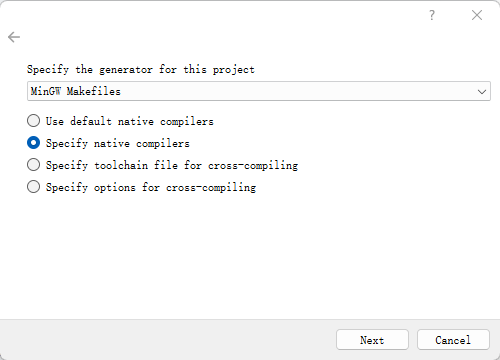
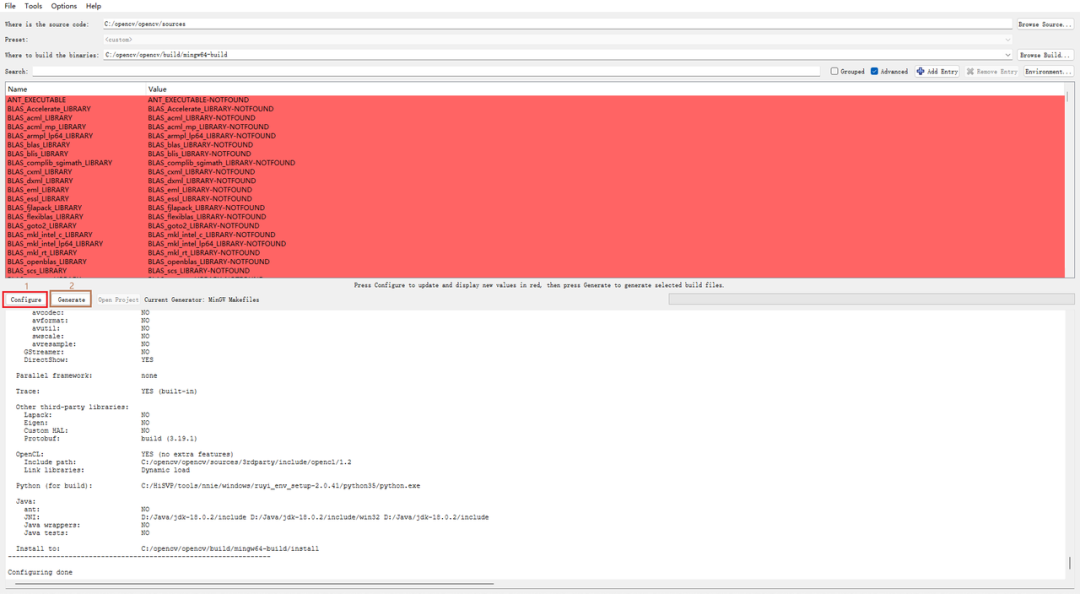
点击
Configure按钮,选择MinGW Makefiles本地编译器:
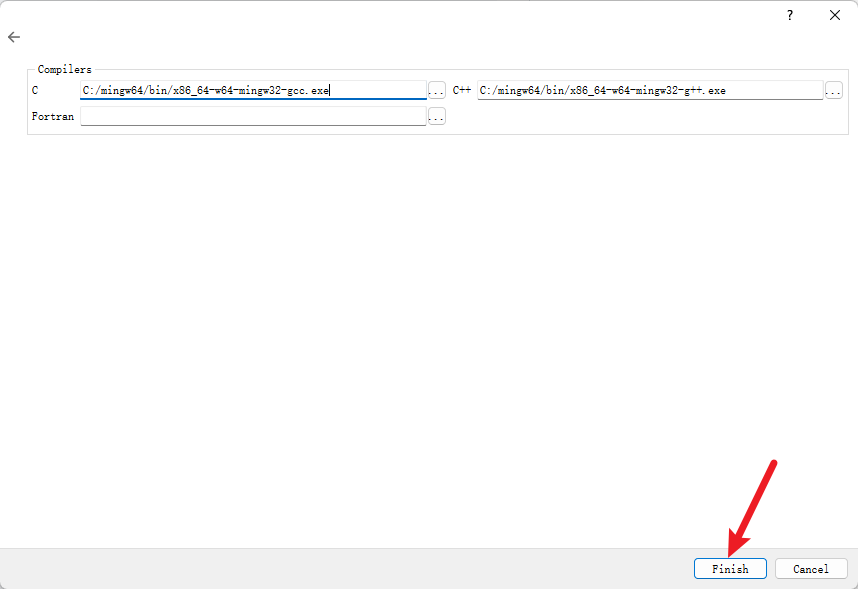
指定你的
gcc和g++路径:
不出意外的话,程序会开始自动生成
Makefiles等文件配置,需要一段时间请耐心等待。
再次点击
Configure后再点击Generate:
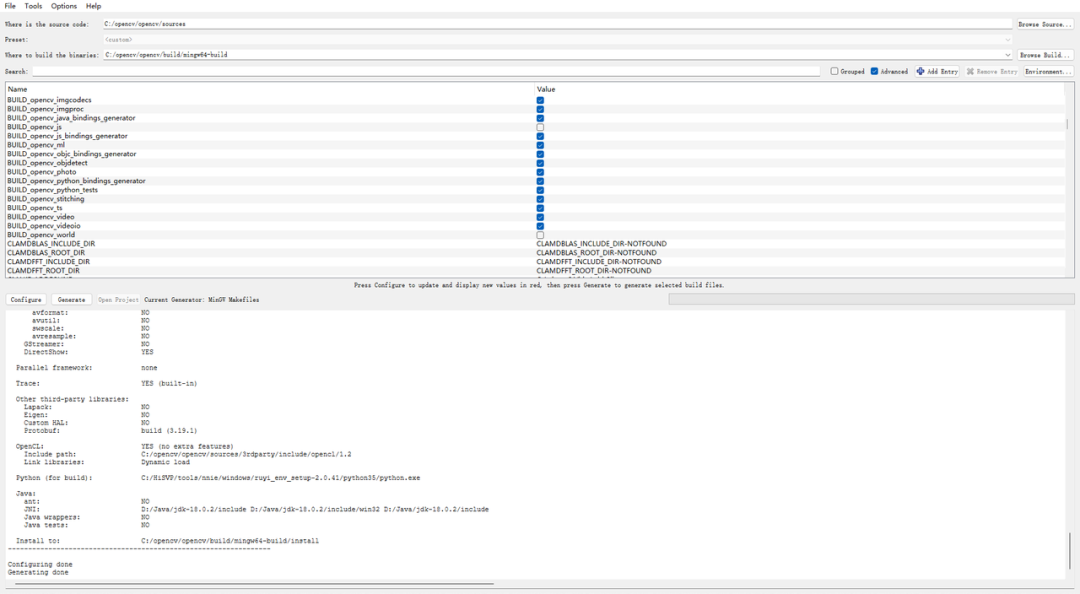
简单总结下:
finish->configuring done->configure->generate
打开
cmd,cd至刚刚的构建目录下C:/opencv/opencv/build/mingw64-build,输入编译指令minGW32-make -j8,完成后再输入minGW32-make install:
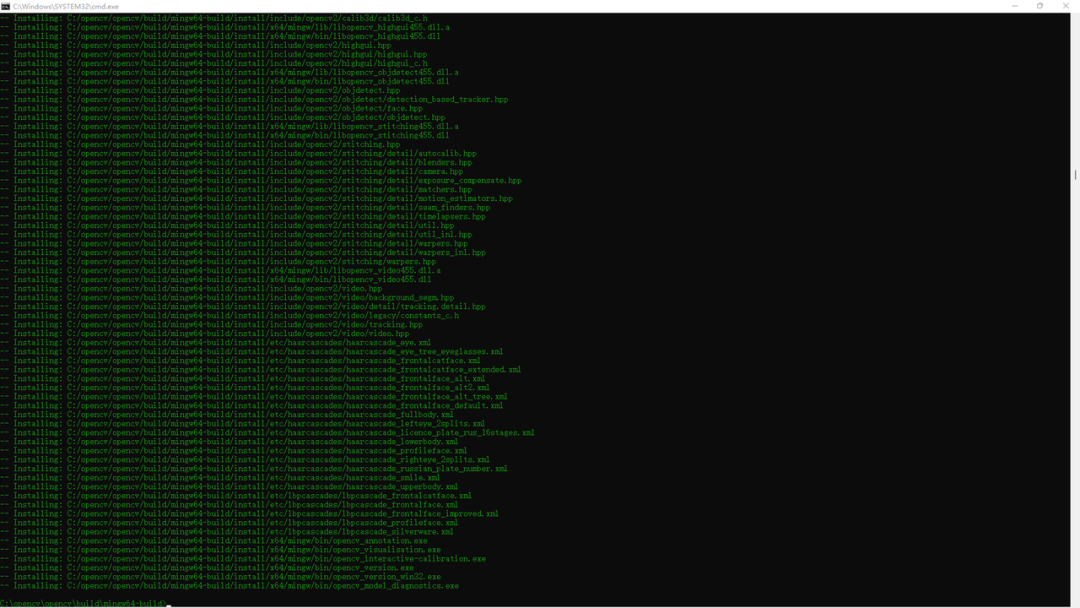
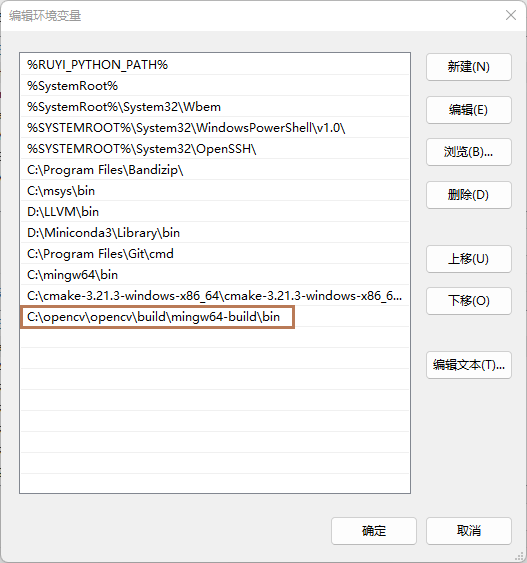
将编译后的
C:\opencv\opencv\build\mingw64-build\bin路径添加到环境变量:
运行
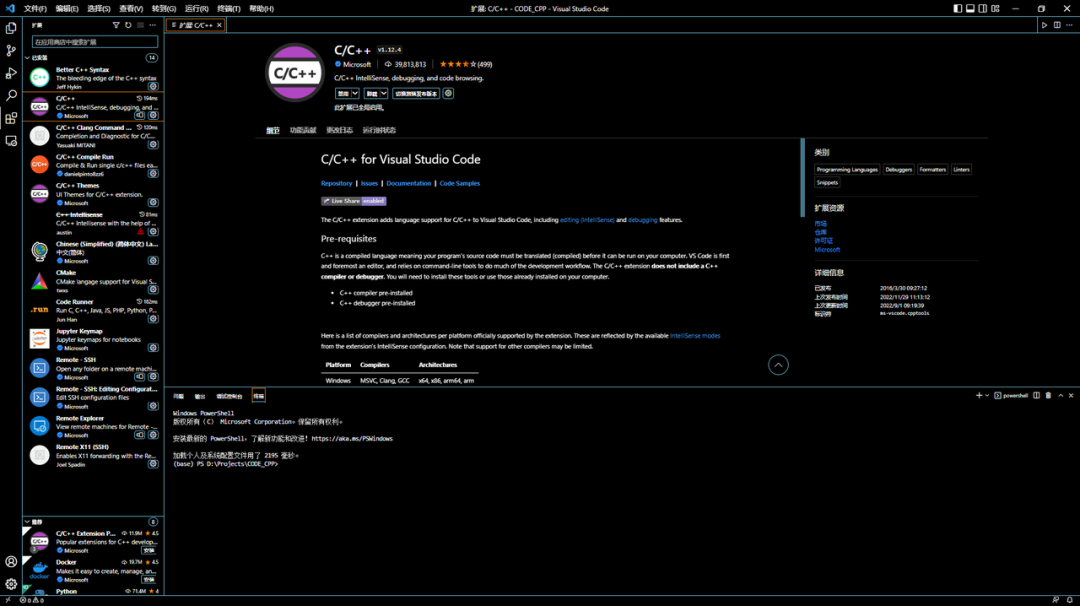
打开
VSCode,在插件管理搜索对应的插件:C/C++:
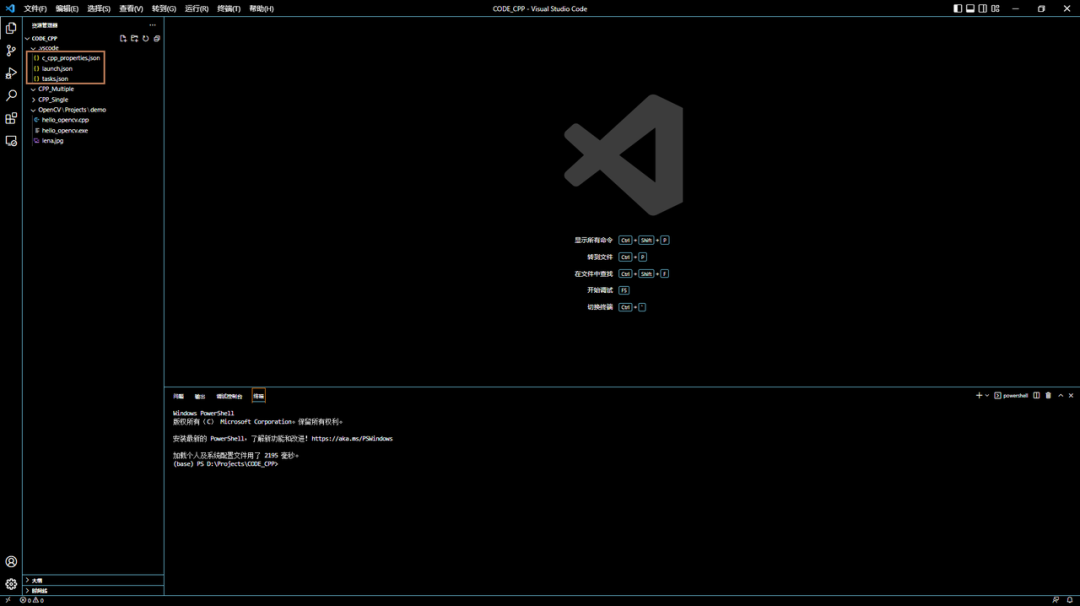
到工作目录下的
.vscode文件夹下新建三个文件:c_cpp_properties.json、launch.json以及tasks.json:
编写`c_cpp_properties.json`文件:
"configurations": [
{
"name": "win",
"includePath": [
"${workspaceFolder}/**",
/*此处修改为你对应的路径*/
"C:/mingw64/include",
"C:/opencv/opencv/build/mingw64-build/install/include",
"C:/opencv/opencv/build/mingw64-build/install/include/opencv2"
],
"defines": [
"_DEBUG",
"UNICODE",
"_UNICODE"
],
/*此处修改为本机gcc编译器所在的对应路径*/
"compilerPath": "C:/mingw64/bin/gcc.exe",
"cStandard": "c11",
"cppStandard": "c++17",
"intelliSenseMode": "clang-x64"
}
],
"version": 4
}编写`launch.json`文件:
"version": "0.2.0",
"configurations": [
{
"name": "Opencv4.5.5 debug", // 配置名称,将会在启动配置的下拉菜单中显示
"type": "cppdbg", // 配置类型,这里只能为cppdbg
"request": "launch", // 请求配置类型,可以为launch(启动)或attach(附加)
"program": "${fileDirname}/${fileBasenameNoExtension}.exe", // 将要进行调试的程序的路径
"args": [], // 程序调试时传递给程序的命令行参数,一般设为空即可
"stopAtEntry": false, // 设为true时程序将暂停在程序入口处,一般设置为false
"cwd": "${workspaceFolder}", // 调试程序时的工作目录,一般为${workspaceRoot}即代码所在目录,根据自身情况设定为${fileDirname}
"environment": [],
"externalConsole": false, // 调试时是否显示控制台窗口,设置为true时会弹出控制台出来,这个随意
"MIMode": "gdb",
/*此处修改*/
"miDebuggerPath": "C:/mingw64/bin/gdb.exe", // miDebugger的路径,注意这里要与MinGw的路径对应
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": false
}
],
"preLaunchTask": "Opencv4.5.5 compile task" // 需要与tasks.json中的`label`字段保持一致
}
]
}编写`tasks.json`文件:
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"type": "shell",
"label": "Opencv4.5.5 compile task",
/*修改*/
"command": "C:/mingw64/bin/g++.exe",
"args": [
"-g",
"-std=c++11",
"${file}",
"-o",
"${fileDirname}\\${fileBasenameNoExtension}.exe",
/*注意:此处导入的路径为编译后的opencv路径,请勿导入原始的opencv路径*/
"-I", "C:/opencv/opencv/build/mingw64-build/install/include/",
"-I", "C:/opencv/opencv/build/mingw64-build/install/include/opencv2/",
"-L", "C:/opencv/opencv/build/mingw64-build/install/x64/mingw/bin/lib*"
],// 编译命令参数
"options": {
/*修改*/
"cwd": "C:/mingw64/bin"
},
"problemMatcher": [
"$gcc"
],
"group": {
"kind": "build",
"isDefault": true
},
"presentation": {
"panel": "new", //这里shared表示共享,改成new之后每个进程创建新的端口
}
}
]
}新建`main.cpp`文件,同时准备一张图片:
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(void)
{
cv::Mat img = cv::imread("D:/Projects/CODE_CPP/OpenCV/Projects/demo/lena.jpg");
cv::imshow("img", img);
cv::waitKey(0);
return 0;
}运行 一切准备就绪后,直接按F5即可,显示结果如下:
完结。
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款

高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~














 3652
3652











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









