






01
背景介绍
自主导航是机器人基础性和关键性技术,是机器人实现其他更高级任务的前提。视觉 SLAM (Simultaneous Localization And Mapping) 利用视觉传感器获取环境图像信息,基于多视图几何算法构建环境地图。视觉SLAM技术广泛应用于无人驾驶、元宇宙、游戏、智能机器人等领域。在无人驾驶方面,一些大厂如腾讯、阿里、百度、华为、小米、商汤等企业投入重金研发,开放大量关于视觉SLAM职位。同时,国内许多独角兽无人驾驶公司如Momenta、AutoX、小马智能和图森未来等举重金招募视觉SLAM人才。随着元宇宙的火爆,国内互联网巨头尤其字节跳动,纷纷将大量资金投入元宇宙,致使视觉SLAM人才进一步稀缺,引发视觉SLAM更高的薪酬与福利。

02
ORB-SLAM3介绍
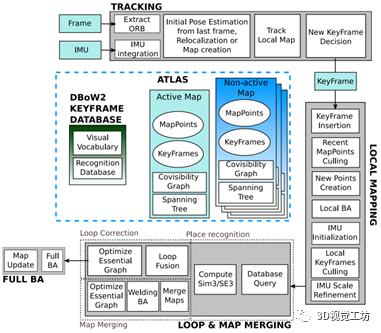
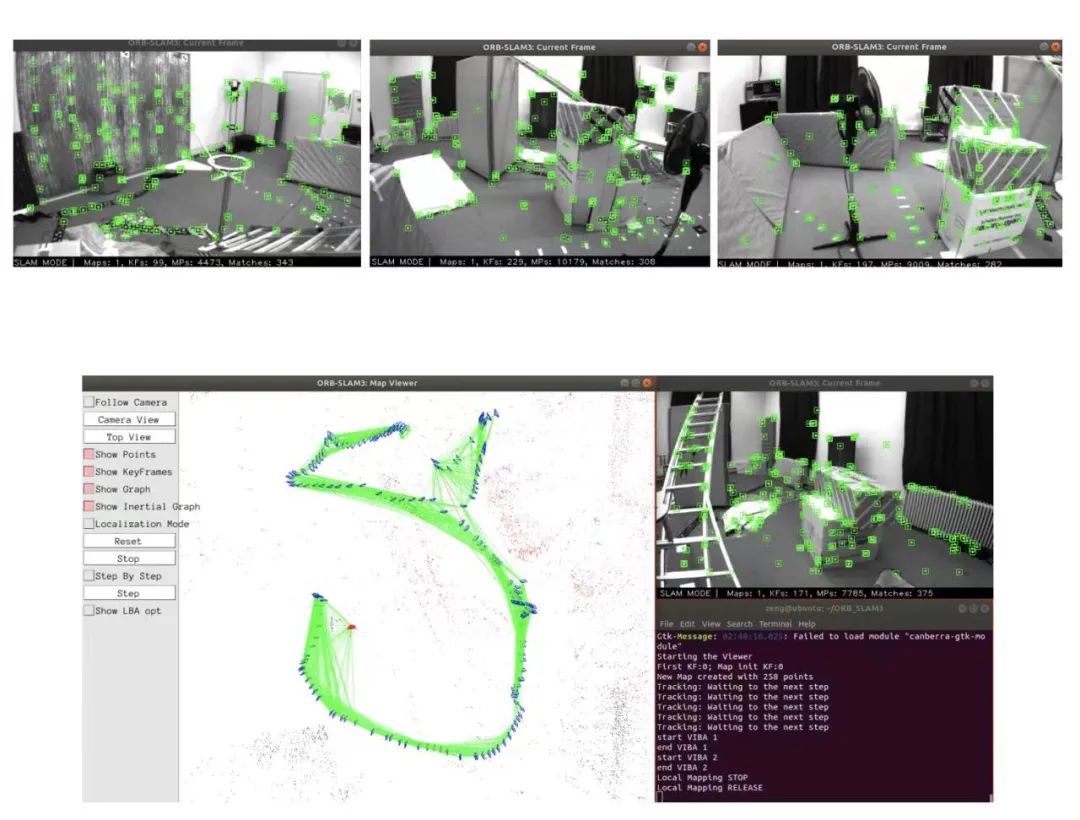
视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。ORB-SLAM系列算法是视觉SLAM中具有最广泛关注与应用的算法。ORB-SLAM3是一个支持视觉、视觉+惯导、混合地图的SLAM系统,可以在单目、双目和RGB-D相机上利用针孔或者鱼眼模型运行。在大场景/小场景、室内/室外,ORB-SLAM3都能鲁棒地实时运行,被广泛应用于商业化产品中。
03
学习难点
在学习ORB-SLAM3过程中,需要掌握算法部署、主要线程之间的逻辑关系,吃透ORB-SLAM3算法原理和底层代码。主要难点包括:深入理解关键帧、共视图、因子图等重要概念;掌握IMU预积分的推导过程,以及局部建图线程、闭环与地图合并线程之间的算法逻辑等!为此我们推出了ORB-SLAM3理论精讲与代码解析课程,希望能够帮助大家尽快入门进阶!
04
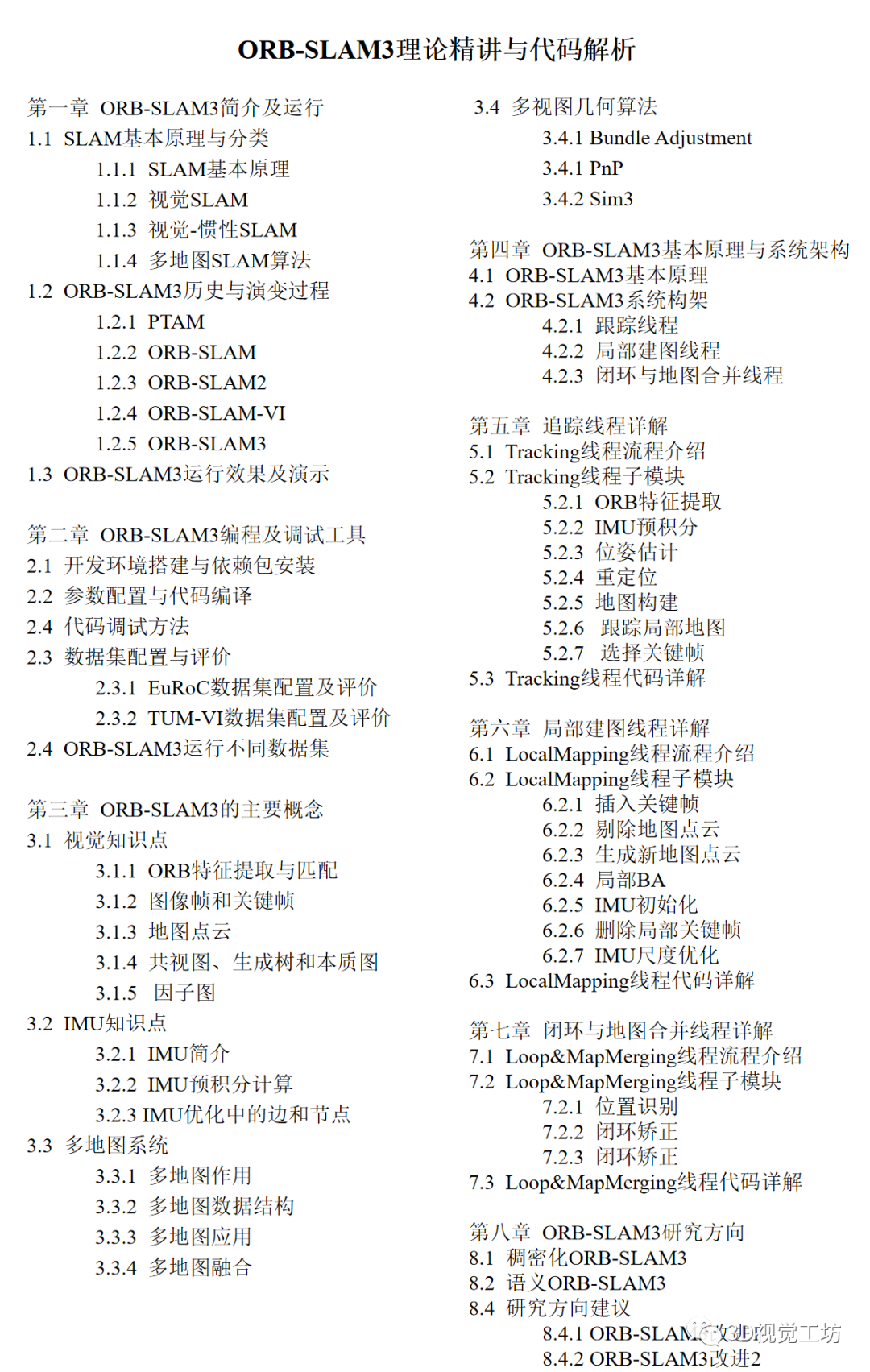
学习大纲
05
课程亮点
1. 从理论与工程角度系统性讲解ORB-SLAM3课程,详细讲解理论算法,代码精析;
2. 富有挑战性的作业习题,将加深你对ORB-SLAM3理论体系的理解,并能对进一步的开发或者科研带来帮助。
3. 专属的学习交流群,可以与讲师,各大院校和企业的人才进行沟通交流,一起分析和讨论遇到的难题,促进能力快速提升;
4. 面向学术研究与工业落地的内容分享。
06
讲师介绍
曾铂,博士毕业于电子科技大学,江苏省“双创博士”,某头部IT大厂机器人技术顾问,中国计算机学会智能机器人专委会、计算机视觉专委会委员。长期从事机器人导航、视觉SLAM、深度强化学习导航方面的研究工作, 在包括IEEE Transactions等SCI期刊和国际会议上发表多篇学术论文,出版机器人专著1项。同时担任IEEE TETCI、IEEE JAS、IROS、自动化学报等多个机器人SCI期刊和国际会议审稿人。精通主流视觉SLAM算法和基于深度强化学习的视觉导航算法。本课程将详细讲解ORB-SLAM3算法原理及代码精析,帮助同学们掌握ORB-SLAM3,并对视觉SLAM更快入门和更深理解。
07
学后收获
1. 掌握ORB-SLAM3基础理论及代码实现;
2. 真正动手使用ORB-SLAM3,并知道结合具体应用场景对ORB-SLAM3算法进行改进;
3. 对视觉SLAM常见算法存在的优势与劣势、适应的场景有深刻的理解。
08
课程安排

注:上表为初步安排,实际可能会有变动,以课程学习群通知为准。
09
课程作业
本课程暂定设置的作业内容包括如下(也会根据课程的推进,作业内容也会有所调整),希望所有学员在学完本门课程后,都能轻松解决如下问题。
作业1、基于图像的ORB特征,根据RANSAC计算并分解基础矩阵,求解相机位姿R,t,结合OpenCV完成求解代码。
作业2、深入理解IMU预积分原理,手写主要的数学公式。
作业3、多视图几何算法的公式推导与代码实现,如Bundle Adjustment、PnP、Sim3等。
作业4、利用公开数据集EuRoc和TUM-VI,完成ORB-SLAM3的部署,实现对数据集进行实时定位与建图;并根据数据集计算定位轨迹的均方差,验证ORB-SLAM3定位准确性。
...
10
课程设置
1. 系统要求
Ubuntu16.04/18.04/20.04,win10/11,macOS,推荐安装Ubuntu18.04
2. 编程语言:C++
3. 基础要求:有一定C/C++编程基础,学习过图像处理相关基础知识。
111
购买通道
▲微信扫码了解课程
12
联系咨询
▲扫码联系客服咨询更多,微信:dddvisiona


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









