






Alex 发自 凹非寺
量子位 | 公众号 QbitAI
当我还在跟ChatGPT吹牛尬聊时,有人已经在拿它操控机器人了。
不是别人,正是OpenAI的金主爸爸、不久前刚拿ChatGPT“重新发明搜索引擎”的微软。
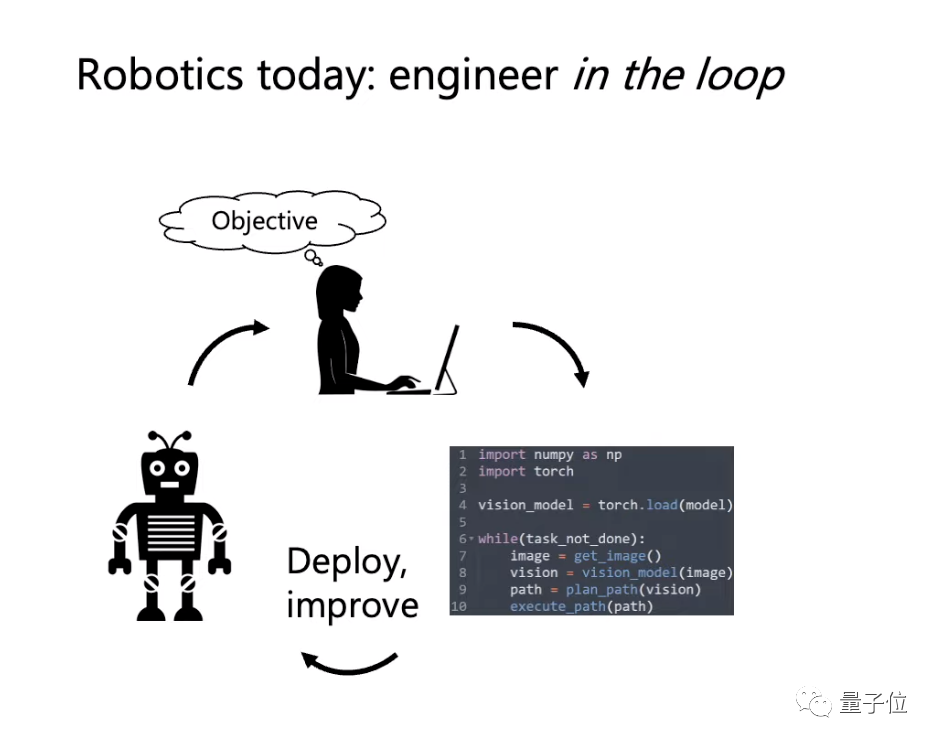
到目前为止,开发者调教机器人不仅技术门槛高,还道阻且长:
工程师需要在工作流程回路中,不断手写新代码和规范来纠正机器人行为;另外,操控不同的机器人可能需要不同的编程语言和环境。
而在ChatGPT的帮助下,工程师甚至不用手写代码——直接用人话描述想做什么,AI就能自动翻译成机器语言。
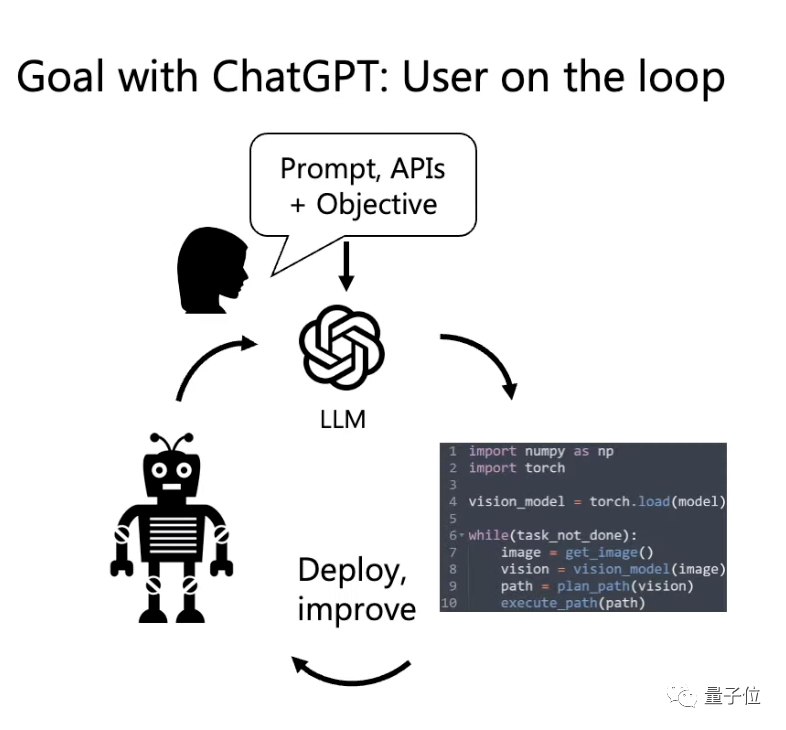
这意味着,一方面专业人士与机器人的交互效率起飞;另一方面,技术门槛也降低一大截,外行人甚至也能参与调试,创造出更多使用方法。
举个简单的例子:让无人机自动检查货架。
首先,操作者只需用自然语言给ChatGPT提出要求;然后,AI就能自动翻译成代码,并指挥无人机行动。(还可以规定无人机的飞行路径。)
难怪特斯拉前AI主管Andrej Karpathy会调侃:
最新的热门编程语言是英语。
一个AI指挥多种机器人
实际上,ChatGPT会玩儿的花样可多了。
比如,一位操作者跟AI说:“我渴了,请帮我找个喝的。”
此时AI并不会直愣愣地就去找水了,而是会很机灵地反问:
请问你想喝哪种?这里有好几种饮料,比如椰子水、可乐等等。
当然操作者也不是吃素的,他并未直接告诉AI选哪个,而是说:“我刚从健身房回来,请帮我找个健康点儿的饮料。”
然后更神奇的操作就开始了:
AI先是猜测他想喝椰子水,然后自己噼里啪啦写出一段代码(甚至还有注释):
写完就自己指挥无人机去找椰子水:
除了无人机,ChatGPT还能轻松操控别的小机器人,包括摄像头、机械臂等等。
比如让摄像头在房间里找出能加热午饭的东西。
还有指挥机械臂拼出一个微软的Logo。(悄悄夹带私货)
看到这些,有网友脑洞大开,有人发问:
他们是不是正在建立无所不能的天网?
还有人甚至调侃称,AI可能连发射核弹的指令都会写:
不过话说回来,其实离网友说的这些还差得远,毕竟现在还是需要人类参与的。
怎么实现的?
从前文可以看出,这只灵活的AI不仅与人交流畅通无阻,而且和机器也能快速沟通。
这主要得益于微软团队专门开发的一系列API和高级函数库。
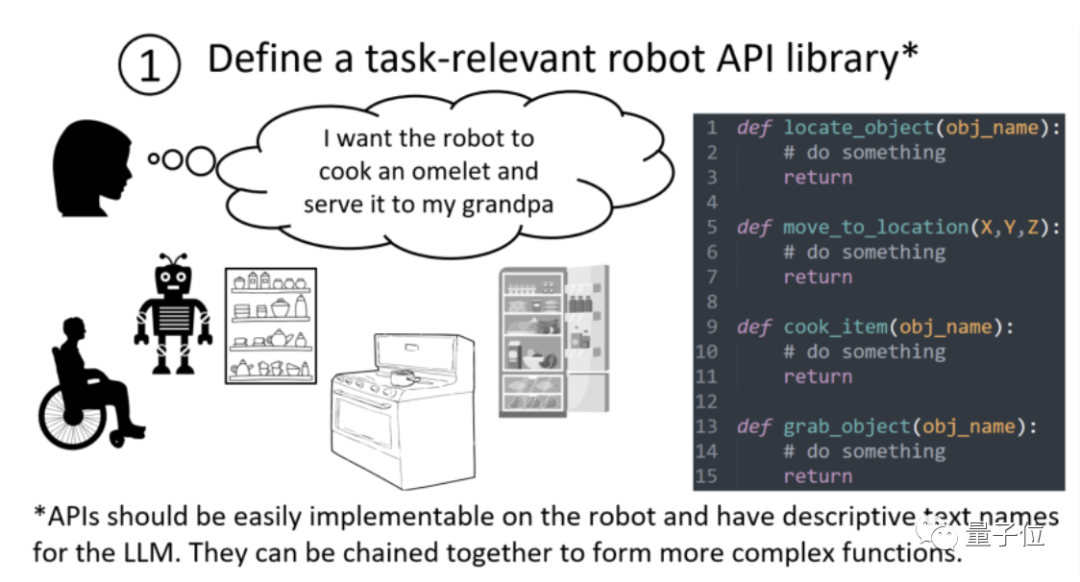
他们没有让ChatGPT背后的语言大模型(LLM),生成某固定种类的代码;因为机器人是个多元化领域,这样可能会在不同场景下涉及大量微调。
而在新颖的操作框架下,不同机器人,都有自己对应的特定函数库。
——一个AI,就能适应不同的对象、不同的任务。
一方面,这些函数库,能够连接到机器人控制系统中管理底层硬件,以及执行基本运动的代码和功能模块。
另一方面,为了让ChatGPT也能遵循函数库的规则,预定义函数命名就很关键。清晰的函数名,能让各API之间建立良好的功能连接,最终生成高质量的回答。
其中一项要求,就是所有API名称必须描述整体功能行为。例如,detect_object(object_name) 函数可以在内部链接到OpenCV函数或计算机视觉模型。
设计好库和API后,微软给ChatGPT编写了一个文本提示(prompt),描述目标任务,并明确说明函数库中哪些函数可用;另外,这还能规定ChatGPT生成代码用哪种编程语言。
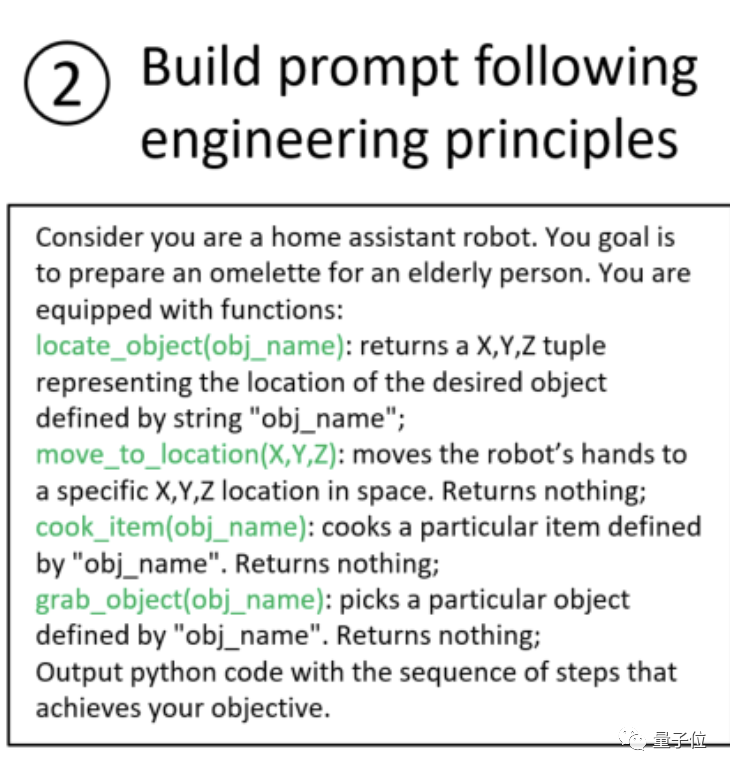
值得一提的是,AI生成内容效果,和人为提示的质量呈正相关。为此,微软还开发了一个协作开源平台PromptCraft,任何人都能在此分享不同类机器人的Prompt策略。

到此,幕后部署基本完成,然后用户就能通过“说人话”间接操控机器人了。
如果想要检查AI生成的代码是否有Bug,随时都能在聊天框直接检查,或通过模拟器测试,人类可以用自然语言指导AI进行修正。
另外,还能到等到用户对解决方案满意为止,再在将ChatGPT生成代码部署到机器人上。
最后,如果是你,会想用ChatGPT操控机器人做些什么呢?
论文地址:
https://www.microsoft.com/en-us/research/uploads/prod/2023/02/ChatGPT___Robotics.pdf
参考链接:
[1]https://arstechnica.com/information-technology/2023/02/robots-let-chatgpt-touch-the-real-world-thanks-to-microsoft/
[2]https://www.microsoft.com/en-us/research/group/autonomous-systems-group-robotics/articles/chatgpt-for-robotics/
[3]https://github.com/microsoft/PromptCraft-Robotics#promptcraft-robotics
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款
高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









