






作者丨东新村轱天乐@知乎
来源丨https://zhuanlan.zhihu.com/p/497434621
编辑丨CV技术指南
可以先看看这个大佬刘兰个川写的BEV Perception博客,里面总结了4种方案,但作者认为第4种基于Transformer的方案才是未来的方向。
博客链接:https%3A//towardsdatascience.com/monocular-bev-perception-with-transformers-in-autonomous-driving-c41e4a893944
我也认为Transformer也是未来,因此以后将只关注此类的方法。
1、Camera only
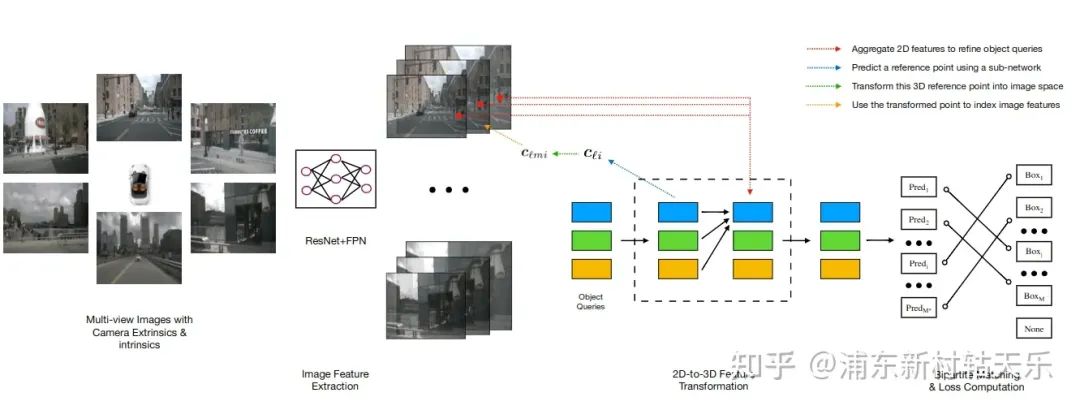
清华,DETR3D
https://arxiv.org/abs/2110.06922
主要思想:固定900个query个数,随机初始化query。每个query对应一个3D reference point,然后反投影到图片上sample对应像素的特征。
缺点:需要预训练模型,且因为是随机初始化,训练收敛较慢
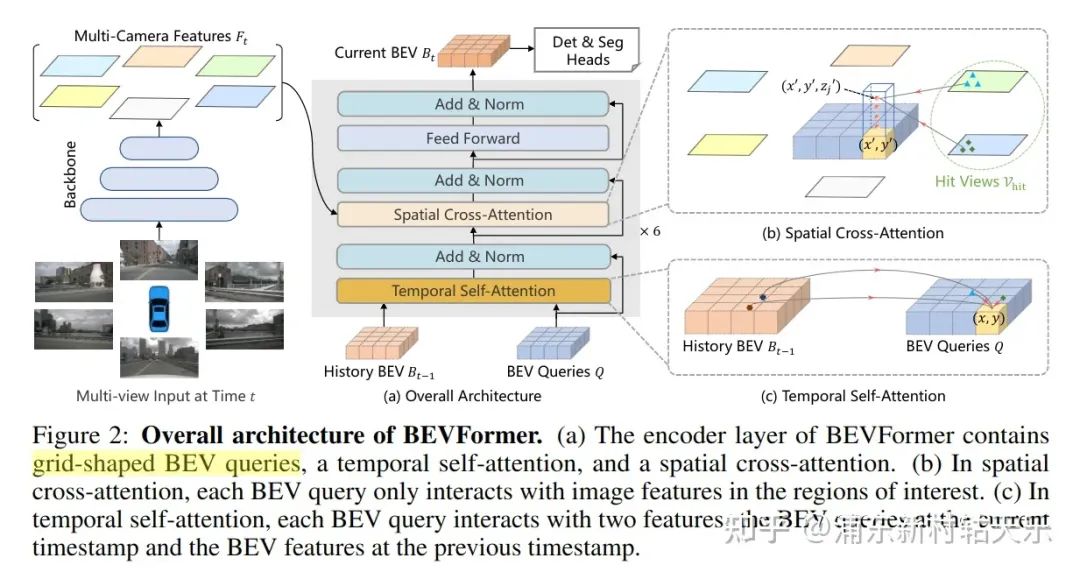
BEV Former
https://arxiv.org/abs/2203.17270
主要思想:将BEV下的每个grid作为query,在高度上采样N个点,投影到图像中sample到对应像素的特征,且利用了空间和时间的信息。并且最终得到的是BEV featrue,在此featrue上做Det和Seg。
Spatial Cross-Attention:将BEV下的每个grid作为query,在高度上采样N个点,投影到图像中获取特征。
Temporal Self-Attention: 通过self-attention代替运动补偿,align上一帧的feature到当前帧的Q
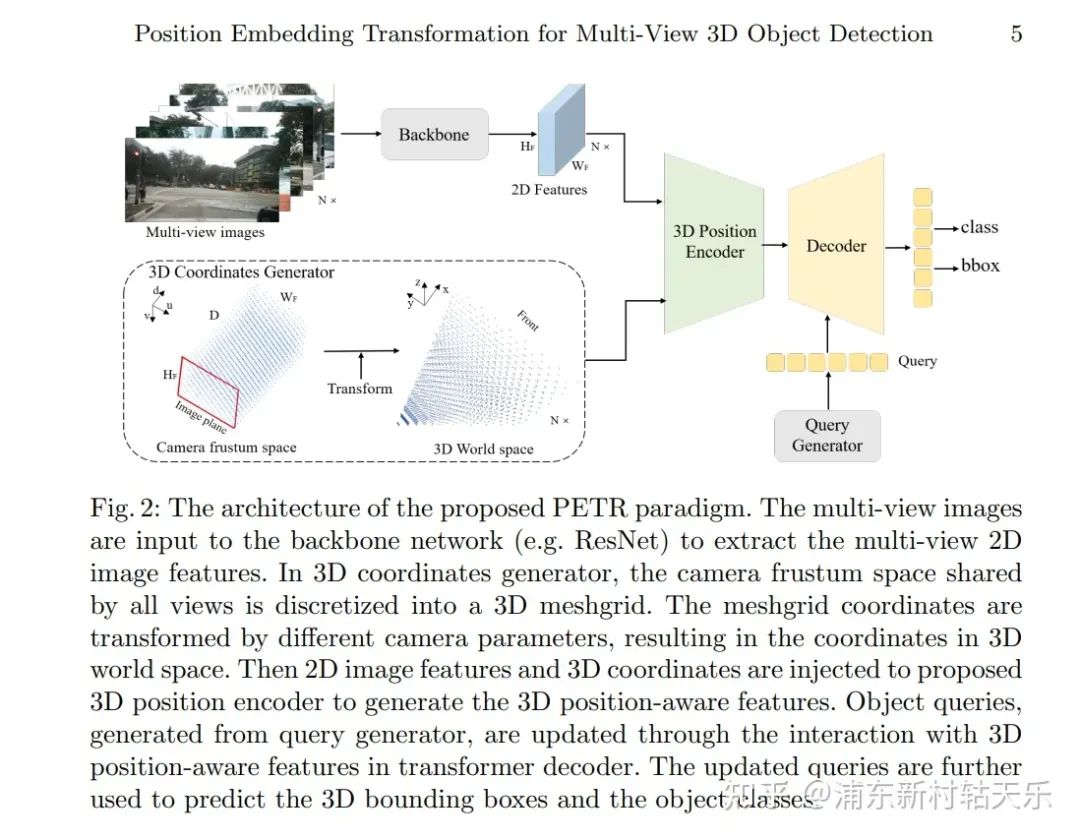
旷视,PETR
https://arxiv.org/pdf/2203.05625.pdf
2、多模态
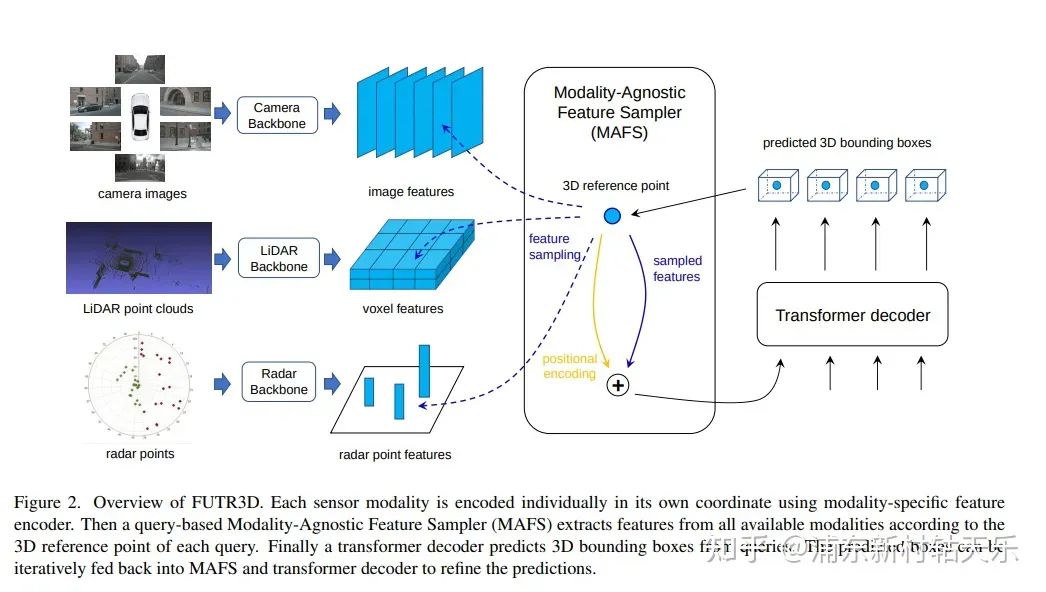
清华,FUTR3D
https://arxiv.org/pdf/2203.10642.pdf
在DETR的基础上,将3D reference point投影到Lidar voxel特征和radar point 特征上。
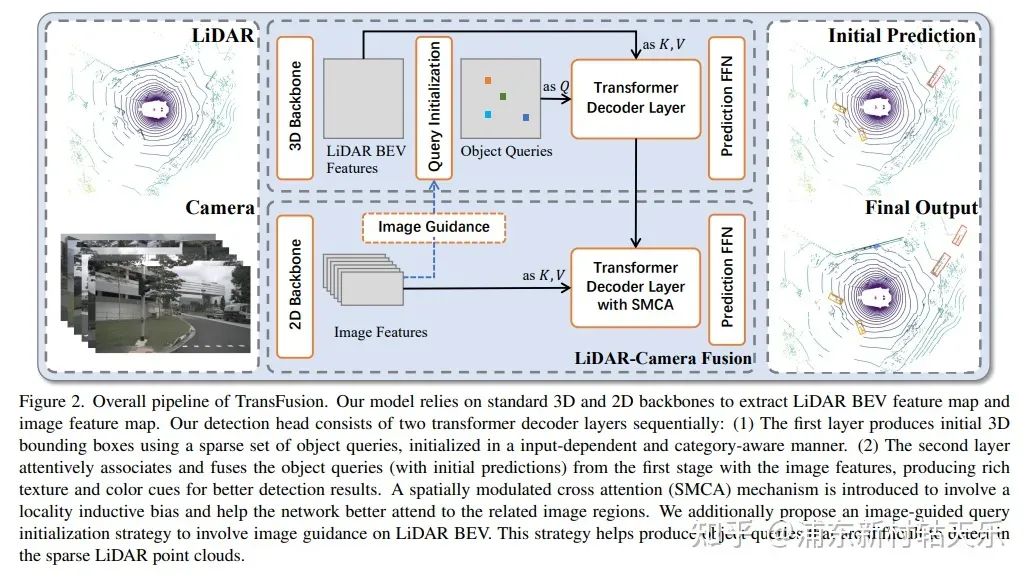
香港科技大学,Transfusion
https://arxiv.org/pdf/2203.11496.pdf
利用CenterPoint在heatmap上获取Top K个点作为Query(这K个点可以看做是通过lidar网络初始化了每个目标的位置,这比DETR用随机点作为Qurey收敛要快),先经过Lidar Transformer得到proposal,把这个proposal作为Query,再和image feature做cross attention。
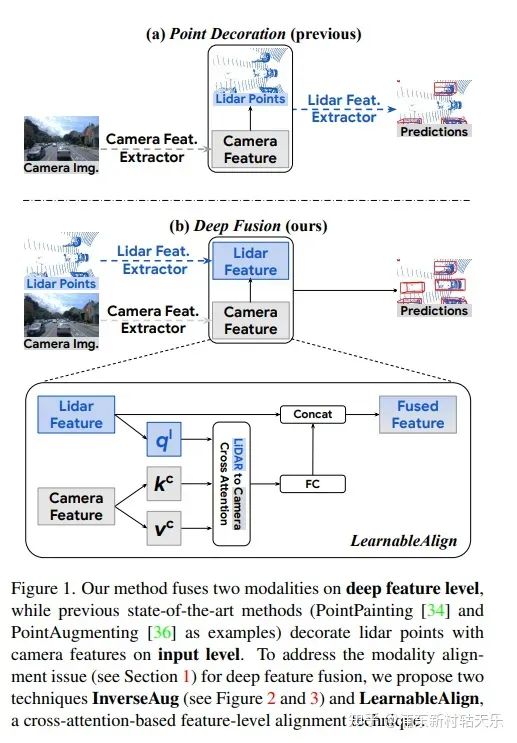
Google,DeepFusion
https://arxiv.org/abs/2203.08195
直接将Lidar feature和Camera feature做cross attention,这个思路牛逼,我不看到这篇论文是绝对想不到还能这么搞的。
高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。

第二步 加入知识星球,问题及时得到解答
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
[2]面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[1]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[2](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[3]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[4]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建
[1]彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进)
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2] 国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
[4]面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
[5]如何将深度学习模型部署到实际工程中?(分类+检测+分割)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









