






3D计算机视觉就业方向有很多,同时对招聘者有着一定的高标准、严要求。在招聘求职过程中公司不但要求熟练掌握相关技能,扎实的编程基础,更要有着相关从业经验,自然也和招聘岗位给出非常诱人的薪资有关。3D视觉就业的方向有很多,比如:三维重建算法工程师、3D视觉算法工程师、SLAM算法工程师、传感器标定算法工程师、规划控制算法工程师、视觉感知算法工程师、相关产品经理等等,同时这些岗位也有着非常诱人的薪资,1-3年经验18-25k或更高,3-5年经验25-40k或更高,专家级给出百万年薪甚至更高。
3D计算机视觉入门相对于开发岗,传统计算视觉,2D计算机视觉要难很多,同时学生和求职者在选择方向上也会有迷茫或者困惑。3D视觉工坊针对这些情况自研了一些列精品课程,包含多个子方向和大专栏,绝对可以帮到大家,少走弯路,祝大家早日找到心仪且高薪工作。下面正式开始介绍:
注意:以下图文中,点击图片,可以直接跳转到详情页!
1、知识星球
「3D视觉从入门到精通」知识星球
连接5000+位铁杆粉丝
2、基础课
该部分旨在帮助大家夯实基础,在招聘求职中对基础尤为重视,对于相关岗位,也是必备技能,在招聘中也会看到相关字眼,如:扎实的C/C++编程基础,有良好编码风格;熟悉ROS/ROS2;有Linux或Ros开发经验优先等等。
零基础入门四旋翼建模与控制(MATLAB仿真)

面向三维视觉算法的C++ 重要模块
精讲从零基础入门到进阶
彻底理解dToF雷达系统设计

面向三维视觉的Linux嵌入式系统教程
相机模型与标定系统课程
(单目+双目+鱼眼+深度相机)
ROS2从入门到精通:理论与实战
移动机器人规划控制入门与实践基于navigation2
3、工业3D视觉
工业3D视觉主要包括工业测量与检测两大方向。在招聘中也会看到相关字眼,如:熟练使用PCL、Open3D、OpenCV等视觉处理库;熟练掌握图像处理、模式识别、双目立体视觉原理、仿射变换、3D点云处理、分割、缺陷检测、机械臂抓取等相关知识;负责开发面结构光三维重建、线共焦、线激光等产品;熟悉相机标定等算法。
(第二期)从零开始搭建搭建一套面结构光3D重建系统
线结构光(单目&双目)三维重建系统教程
机械臂抓取从入门到实战

国内首个面向工业级实战的点云处理课程
点云入门处理与实战(Open3D)

国内首个3D视觉缺陷检测:理论、源码与实战

4、SLAM
SLAM技术应用场景包括家用扫地机器人、室外割草机、服务机器人等移动机器人。课程中的该部分非常重要,在深入掌握课程中某一两个SLAM开源框架后,在面试求职时,一般企业给的薪资会非常可观。在相关招聘中,我们会经常看到一些字眼,如:熟悉ROS/ROS2;熟悉ORB-SLAM2,VINS-Fusion,SVO等开源VSLAM;负责2D激光雷达建图与定位;多传感器融合运动估计;了解滤波和图优化VSLAM框架;熟悉LOAM,LegoLOAM,LVI-SAM,等开源框架;熟悉下列领域其中一个:Lidar SLAM、RGBD SLAM、单目视觉SLAM、多目视觉SLAM等。
激光SLAM
深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
彻底剖析激光-视觉-IMU-GPS融合SLAM算法理论推导、代码讲解和实战

(第二期)彻底搞懂基于LOAM框架的3D激光SLAM源码剖析到算法优化

透彻剖析室内、室外激光slam关键算法原理、代码与实战
视觉SLAM
彻底搞懂视觉-惯性SLAMVINS-Fusion原理精讲与源码剖析

(第2期)透彻理解视觉ORB-SLAM3理论基础+代码解析+算法改进
5、视觉三维重建课程
该部分旨在帮助同学快速掌握三位重建相关知识,在招聘时,我们会看到相关招聘要求:熟悉 SFM/立体匹配/结构光三维成像等算法;熟悉点云、网格数据处理算法;熟悉三维环境重建相关算法预研和开发;熟悉深度学习技术在三维重建中的预研,比如语义识别,NERF等;熟悉传统SfM,MVS算法,熟悉基于深度学习的算法:MVSNet等。
基于深度学习的三维重建MVSNet系列

彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
(第二期)从零开始搭建搭建一套面结构光3D重建系统
线结构光(单目&双目)三维重建系统教程
6、自动驾驶
自动驾驶是现在非常火的话题,自动华为问界M7问世以来,将自动驾驶又推上了一个新的高峰,同时各家自动驾驶公司百花齐放,百家争鸣,同时在招聘人才时,不惜重金。这就自然而然要求应聘者必须达到相关要求,可谓是高标准、严要求。在招聘时,同样也会看到相关要求:熟悉Camera/Lidar/Radar等传感器的主流感知算法;熟悉点云3D目标检测相关算法,包括但不限于PointPillars、PointRCNN等;有Linux或ROS开发经验优先。熟悉深度估计、语义分割、目标检测等深度学习算法的优化和部署。熟悉单目+双目+激光雷达的传感器融合等。
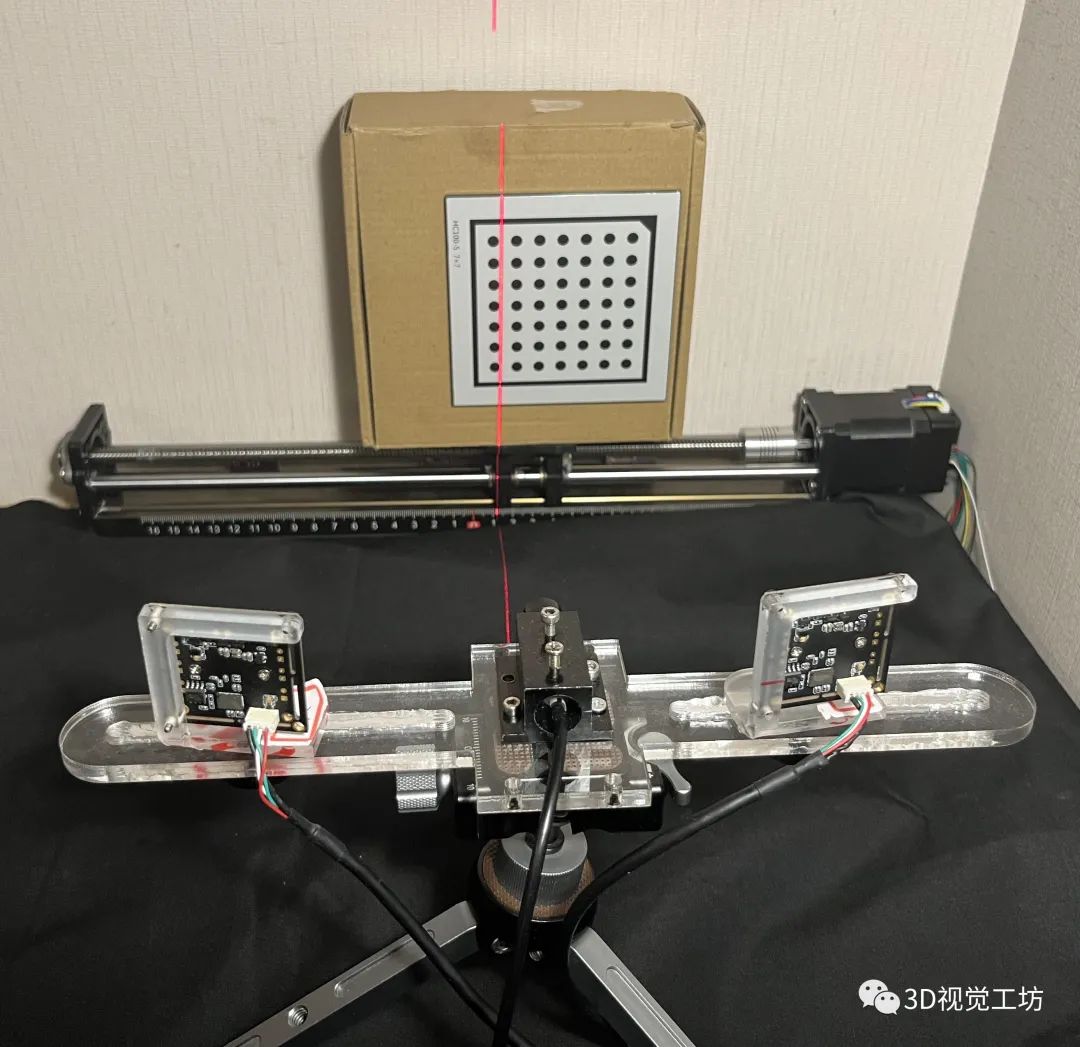
深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
自动驾驶中的深度学习模型部署实战
面向自动驾驶领域的3D点云深度学习目标检测课程
单目深度估计方法: 理论与实战

7、硬件相关
[硬件+源码]精迅V1(科研级)单目/双目3D结构光扫描仪

[硬件+源码]单目/双目线结构光扫描仪
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:
[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;
[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;
[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。
[三维重建方向]NeRF、colmap、OpenMVS、MVSNet等。
[无人机方向]四旋翼建模、无人机飞控等。
除了这些,还有求职、硬件选型、视觉产品落地等交流群。
大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









