






大家好,我是小凡。
双十一即将来临,话不多说,先给大家赠送一份福利,仅三天内可用。





双十一即将来临,话不多说,先给大家赠送一份福利,仅三天内可用。


经过五年多时间,我们「3D视觉从入门到精通」知识星球沉淀了太多重磅干货,这里简单梳理主要包括如下图所示几个部分。由于内容比较多,我们这里重点介绍下我们星球里的独家秘制课程包括哪些。加入星球后,即可学习。
基础课程
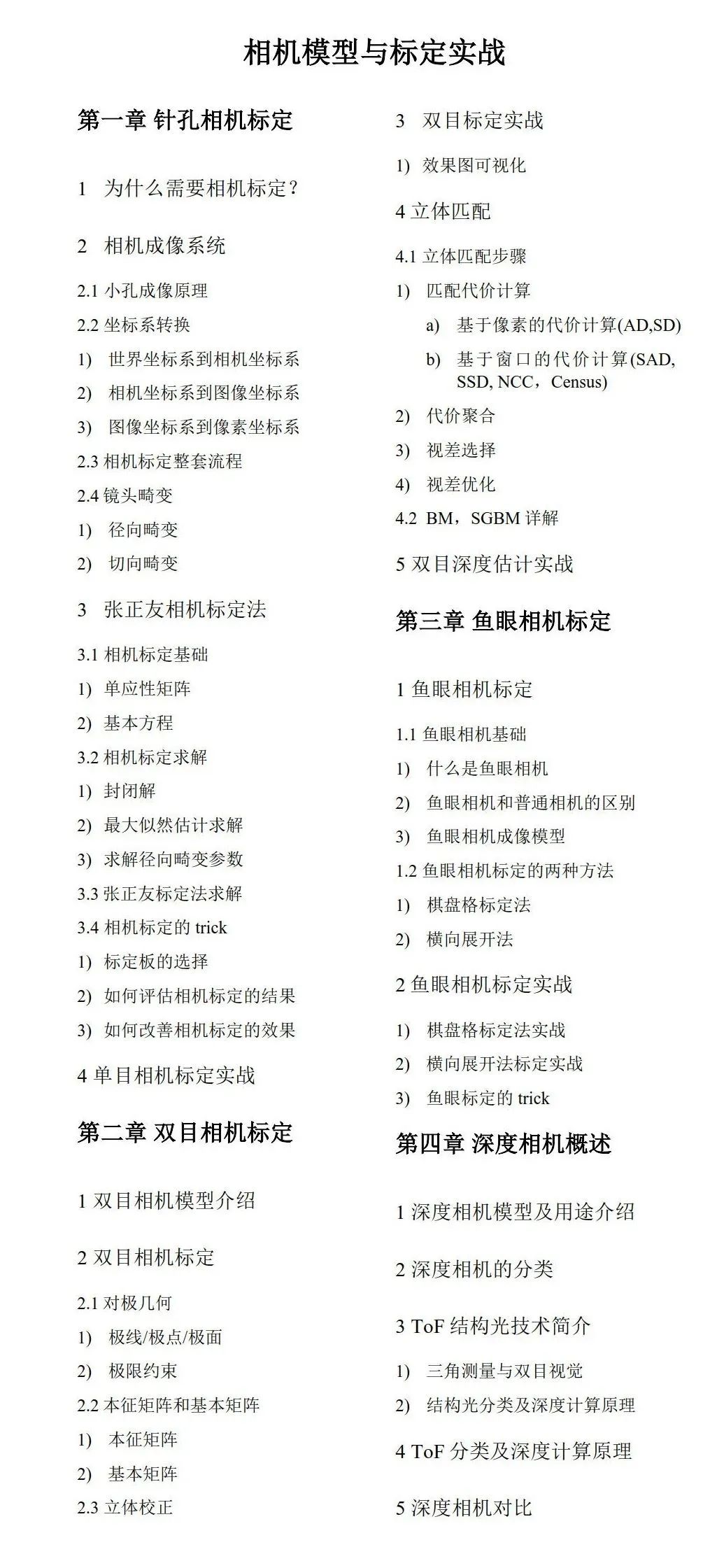
课程1:相机标定从入门到进阶
主讲嘉宾:上海交通大学在读博士生,主要研究自由型面的精密测量方法,「3D视觉从入门到精通」星球嘉宾。
主讲嘉宾:天涯居士 ,在读博士,主要研究结构光与偏折术的融合。
主讲嘉宾:小凡,3D视觉从入门到精通知识星球 星主
主讲嘉宾:廖康,毕业于北京交通大学信息科学研究所,师从林春雨教授。将赴新加坡南洋理工大学S-Lab担任博士后研究员,合作导师为Chen Change Loy。曾于德国马克斯·普朗克研究所(马普所)访问一年。研究方向为面向大视场的计算机视觉、3D视觉、生成模型等。相关研究成果发表至CVPR, ICCV, ECCV, ICRA, TIP等。
主讲嘉宾:韦恩,研究生毕业于某985高校,曾在小米、平安科技、创新工厂等多个公司任职,有丰富的算法工作经验,在天池、kaggle等国内算法比赛中获得TOP。
课程内容包括:
天涯居士-基于Python的单目相机标定理论+实践:https://t.zsxq.com/135P1TpJH
小凡-如何高精度绘制椭圆?:https://t.zsxq.com/13bhIAX2q
小凡-利用迭代优化特征点的方法进行高精度相机标定:https://t.zsxq.com/13pE6s35Z
廖康-深度学习驱动下的相机标定技术发展:https://t.zsxq.com/13YkQeFUA
沈毅君-相机标定的基本原理与经验分享:https://t.zsxq.com/13yBNN10Q
韦恩-双目相机标定(上篇):https://t.zsxq.com/13hFse13z
韦恩-双目相机标定(下篇):https://t.zsxq.com/13j0A3pGJ
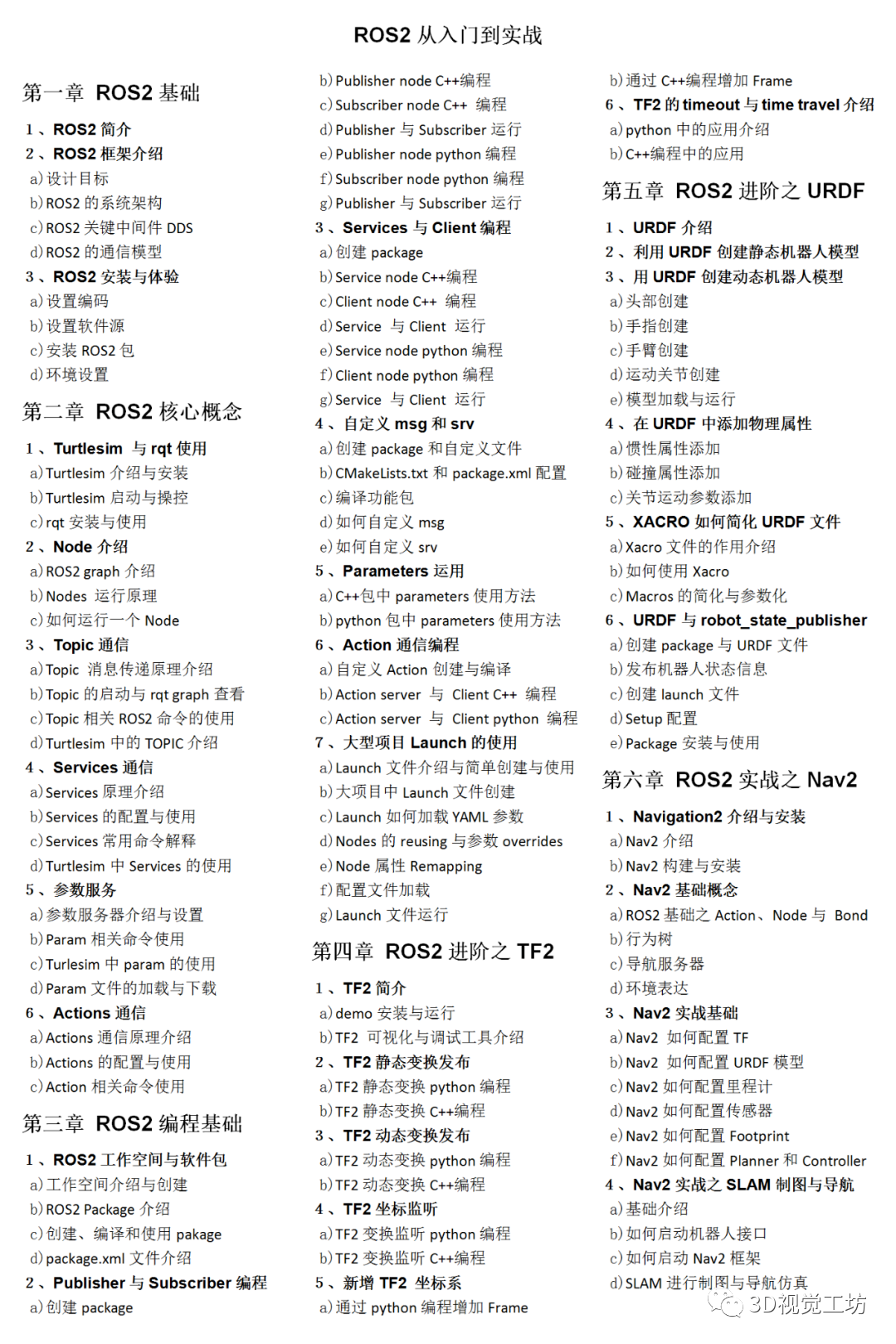
课程2:ROS2从入门到精通:理论与实战
主讲老师:袁标,毕业于国家双一流学校的重点专业,某自动驾驶创业公司合伙人兼技术负责人,在自动驾驶领域深耕多年,精通ROS2框架应用和自动驾驶相关算法工程应用。本课程将对ROS2进行全面实操教学,并结合NAV2框架进行实战训练,助力各位同学快速入门自动驾驶领域。课程内容包括:
袁标-第一章 ROS2基础(上篇):https://t.zsxq.com/13hA4b2Qc
袁标-第一章 ROS2基础(下篇):https://t.zsxq.com/13nayeDwM
袁标-第二章 ROS2核心概念(上篇):https://t.zsxq.com/13HYeSX3B
袁标-第二章 ROS2核心概念(下篇):https://t.zsxq.com/13NlcPWI4
袁标-第三章 ROS2编程基础 (上篇):https://t.zsxq.com/13hisrVok
袁标-第三章 ROS2编程基础 (下篇):https://t.zsxq.com/13w9pxiae
袁标-第四章 ROS2 进阶之TF2 (上篇):https://t.zsxq.com/13vdZrNLp
袁标-第四章 ROS2 进阶之TF2 (中篇):https://t.zsxq.com/13E0P934Z
袁标-第四章 ROS2 进阶之TF2 (下篇):https://t.zsxq.com/13rBcVUcc
袁标-第五章 ROS2进阶之URDF(一):https://t.zsxq.com/13eJDQrIi
袁标-第五章 ROS2进阶之URDF(二):https://t.zsxq.com/139HGoP1L
袁标-第五章 ROS2进阶之URDF(三):https://t.zsxq.com/13yYCQQL8
袁标-第五章 ROS2进阶之URDF(四):https://t.zsxq.com/13F5fFGS8
袁标-第五章 ROS2进阶之URDF(五):https://t.zsxq.com/13KTMICtT
袁标-第六章 ROS2-实战之Nav2(一):https://t.zsxq.com/13Ftg1Mmb
袁标-第六章 ROS2-实战之Nav2(二):https://t.zsxq.com/13bsj6O8q
袁标-第六章 ROS2-实战之Nav2(三):https://t.zsxq.com/13FqsLone
袁标-第六章 ROS2-实战之Nav2(四):https://t.zsxq.com/13fsAtJC4
袁标-第六章 ROS2-实战之Nav2(五):https://t.zsxq.com/13vgH0lQL
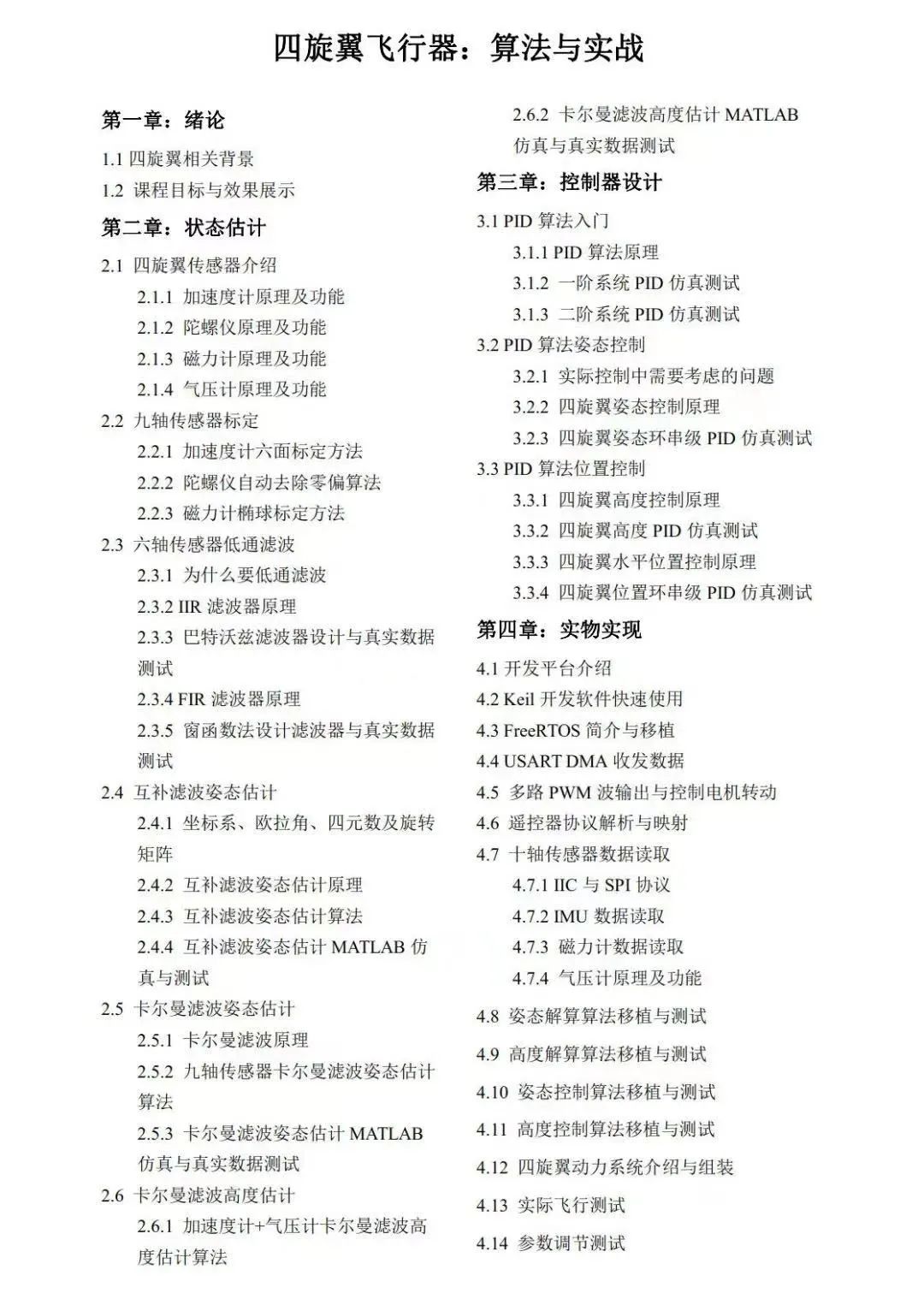
课程3:四旋翼飞行器:算法与实战
主讲老师:耿耿,五年嵌入式开发经验,比赛与项目经历丰富。自主研发的四旋翼飞行控制平台,已应用于比赛科研项目。该四旋翼系统性能基本达到国内外开源飞控水平。「3D视觉从入门到精通」知识星球嘉宾。课程内容:
耿耿-第一章 四旋翼飞行器 绪论 上篇:https://t.zsxq.com/13S1H5DxY
耿耿-第一章 四旋翼飞行器 绪论 下篇:https://t.zsxq.com/135zhRTZ1
耿耿-第二章 四旋翼飞行器|互补滤波姿态估计、卡尔曼滤波姿态、高度估计(上篇):https://t.zsxq.com/135PDjo75
耿耿-第二章 四旋翼飞行器|互补滤波姿态估计、卡尔曼滤波姿态、高度估计(中篇):https://t.zsxq.com/13W5PV7RQ
耿耿-第二章 四旋翼飞行器|互补滤波姿态估计、卡尔曼滤波姿态、高度估计(下篇):https://t.zsxq.com/13pDueJ3E
耿耿-第三章 四旋翼飞行器|PID算法详解与实战(上篇):https://t.zsxq.com/13bKmNitR
耿耿-第三章 四旋翼飞行器|PID算法详解与实战(下篇):https://t.zsxq.com/13L1kak6s
耿耿-第四章 四旋翼飞行器|环境配置、模块驱动开发(上篇):https://t.zsxq.com/13P6FPTPU
耿耿-第四章 四旋翼飞行器|环境配置、模块驱动开发(中篇):https://t.zsxq.com/13VMLz9oC
耿耿-第四章 四旋翼飞行器|环境配置、模块驱动开发(下篇):https://t.zsxq.com/130XFLdF2
耿耿-第五章 四旋翼飞行器|算法移植、系统组装测试、参数调节(1):https://t.zsxq.com/137soJ9sa
耿耿-第五章 四旋翼飞行器|算法移植、系统组装测试、参数调节(2):https://t.zsxq.com/13z9bvFEL
耿耿-第五章 四旋翼飞行器|算法移植、系统组装测试、参数调节(3):https://t.zsxq.com/13kuY0Fu4
耿耿-第五章 四旋翼飞行器|算法移植、系统组装测试、参数调节(4):https://t.zsxq.com/13RZgCfkE
工业3D视觉课程
课程1:基于结构光投影三维重建技术
主讲老师介绍: 课程大纲:
课程大纲:
第一章 吴周杰-绪论:https://t.zsxq.com/13kMXT0TT
第二章 结构光三维重建系列课程|格雷码编码和解码:https://t.zsxq.com/13TwWm0Bx
吴周杰-第三章 (上篇)基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量:https://t.zsxq.com/13vT6caoz
吴周杰-第三章 (下篇)基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量:https://t.zsxq.com/139Su00EK
邓吉-第四章 结构光三维重建系列|时间相位展开方法 上篇:https://t.zsxq.com/13E5jJp0J
邓吉-第四章 结构光三维重建系列|时间相位展开方法(中篇) :https://t.zsxq.com/13HR2fI5U
邓吉-第四章 结构光三维重建系列|时间相位展开方法(下篇):https://t.zsxq.com/13JYakabt
杨洋-第五章 结构光双目立体匹配三维重建方法(上篇):https://t.zsxq.com/13jDNyM1M
杨洋-第五章 结构光双目立体匹配三维重建方法(下篇):https://t.zsxq.com/13lt2mDwg
书涵-第六章 三维结构光系统标定(上篇):https://t.zsxq.com/137B3pYrW
书涵-第六章 三维结构光系统标定(中篇):https://t.zsxq.com/13rBLX2h6
书涵-第六章 三维结构光系统标定(下篇):https://t.zsxq.com/13YVMUMhT
邓吉-第七章 结构光的非线性问题与校正 上篇:https://t.zsxq.com/13ADDLGRw
邓吉-第七章 结构光的非线性问题与校正 下篇:https://t.zsxq.com/13UsEG1VW
张琼怡-第八章-高反光表面三维视觉测量方法 上篇:https://t.zsxq.com/13U6rzHE5
张琼怡-第八章-高反光表面三维视觉测量方法 下篇:https://t.zsxq.com/13OIwnHuw
郭文博-第九章 基于相移条纹分析的实时三维测量技术 上篇:https://t.zsxq.com/13gdc7dRs
郭文博-第九章 基于相移条纹分析的实时三维测量技术 下篇:https://t.zsxq.com/13UhgQaL2
吴周杰-第十章 高速结构光三维面形测量方法:https://t.zsxq.com/13Pka81SN
邓吉-第十一章 计算深度分割技术的实现与全局效应下的结构光三维重建 上篇:https://t.zsxq.com/13r9hmPGK
邓吉-第十一章 计算深度分割技术的实现与全局效应下的结构光三维重建 下篇:https://t.zsxq.com/137sLUfFf
邓吉-第十二章 结构光方法新应用(上篇):https://t.zsxq.com/13daVa6pL
邓吉-第十二章 结构光方法新应用(中篇):https://t.zsxq.com/134Y5MLQd
邓吉-第十二章 结构光方法新应用(下篇):https://t.zsxq.com/13gyamcET
课程2:三维点云从入门到精通(基于PCL)
课程主讲老师:
肖勇,密歇根大学博士。Mapping & Localization Technical Specialist @ Lucid Motors,主要从事无人车地图和定位算法研发。先后参与 Lyft、百度无人车项目开发。密歇根大学土木工程博士,武汉大学测绘工程学士。
李子宽,南航在读博士,主要从事激光雷达数据处理与应用的研究。发表SCI收录论文1篇,中文核心4篇,授权发明专利4项。曾获得硕士国家奖学金、优秀研究生等荣誉称号。
课程内容:
李子宽-PCL基础-上篇: https://t.zsxq.com/13c12pCQm
李子宽-PCL基础-下篇:https://t.zsxq.com/13a6kymDn
肖勇-点云配准(两帧)-PCL:https://t.zsxq.com/13ZPj09MY
李子宽-Open3D与点云处理简介:https://t.zsxq.com/139ABzFMy
李子宽-大规模点云可视化技术:https://t.zsxq.com/13PABj6gS
白旭阳-PointDSC:基于特征匹配的点云配准方法 上篇:https://t.zsxq.com/1383G2WK5
白旭阳-PointDSC:基于特征匹配的点云配准方法 下篇:https://t.zsxq.com/13D0O826T
谢楚琳-点云补全的方法梳理及最新进展分享:https://t.zsxq.com/13Vo1ZlfR
课程3:机械臂位姿估计与抓取
主讲嘉宾:菩提 ,工业机器人视觉方向,知名企业算法工程师。主讲内容包括:
视觉引导概述
视觉引导中的空间描述和变换
视觉引导常用定位和引导方法介绍
仿真实例:基于点云的视觉引导系统
主讲嘉宾:
王谷,清华大学自动化系BBNC Lab在读博士生,导师为季向阳教授,主要研究方向为基于深度学习的6D物体姿态估计,相关研究成果曾发表于ECCV, ICCV, CVPR及IJCV等会议和期刊。主讲内容包括:
物体姿态估计简介
基于CNN的单目物体姿态估计的前沿方法
深入回顾6D姿态直接回归法的近期进展
GDR-Net: 一种基于几何指导的单目6D姿态直接回归法
主讲嘉宾:
书涵,结构光算法工程师,拥有多年结构光算法研发工作经验,主要专注于三维重建、相机标定等视觉算法的实现和优化 主讲内容包括:
手眼标定基本介绍
手眼标定公式推导
方程 AX=XB 解法讲解
使用opencv完成手眼标定
初学者易错点总结
主讲嘉宾:
觅云,硕士毕业于东北大学,目前为某头部智能制造公司的视觉算法工程师,致力于机器视觉和机器人运动控制等方向的应用研究。主讲内容包括:1、应用场景及行业发展 2、机械臂抓取主流方案 3、3D相机硬件测距原理介绍 4、ROS开发环境介绍 5、开发环境搭建。
课程内容:
冠宇-视觉引导课程:https://t.zsxq.com/13dXLwESX
书涵-手眼标定方法|原理与实战(上篇):https://t.zsxq.com/13iZ6Ttb5
书涵-手眼标定方法|原理与实战(下篇):https://t.zsxq.com/13702Rhzp
李奇-基于深度学习的物体抓取位置估计 :https://t.zsxq.com/130VtXxar
王谷-基于几何信息指导的单目6D物体姿态直接回归算法:https://t.zsxq.com/130pbx7ln
课程4:线结构光三维重建
原一-线结构光三维重建!Steger算法提取中心线:https://t.zsxq.com/13WGwuwlv
原一-线结构光三维重建!灰度重心法提取中心线:https://t.zsxq.com/13Sn9ikuf


SLAM课程
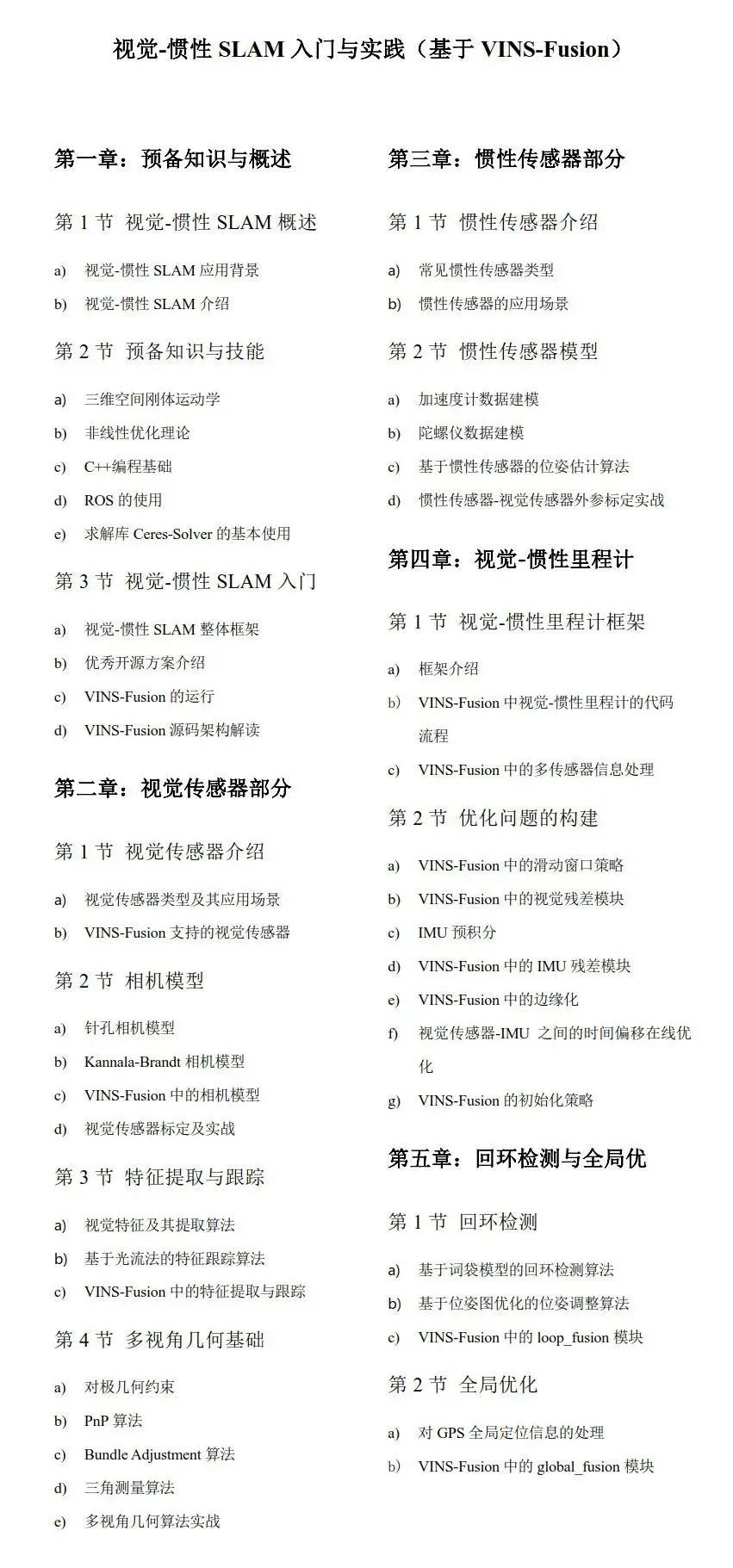
课程1:视觉-惯性SLAM入门与实践(基于Vins-Fusion)
主讲老师:薛轲翰 毕业于西北工业大学,国内某机器人创业公司技术总监,具有多年SLAM和机器人领域产品、实战经验, 曾获国内外多个机器人大赛一等奖和冠军。
课程内容包括:
薛轲翰-第一章 Vins-Fusion预备知识与概述(一):https://t.zsxq.com/13Cif1n6Z
薛轲翰-第一章 Vins-Fusion预备知识与概述(二):https://t.zsxq.com/130s7TSqN
薛轲翰-第一章 Vins-Fusion预备知识与概述(三):https://t.zsxq.com/13Fm9kbma
薛轲翰-第一章 Vins-Fusion预备知识与概述(四):https://t.zsxq.com/13xEClfOW
薛轲翰-第二章 初识VINS-Fusion代码(一):https://t.zsxq.com/13LTXE7A0
薛轲翰-第二章 初识VINS-Fusion代码(二):https://t.zsxq.com/13BMuY1t0
薛轲翰-第二章 初识VINS-Fusion代码(三):https://t.zsxq.com/132Q6aPHl
薛轲翰-第三章 Vins-Fusion|视觉传感器部分(一):https://t.zsxq.com/13tDYcF2M
薛轲翰-第三章 Vins-Fusion|视觉传感器部分(二):https://t.zsxq.com/13a3V1KR7
薛轲翰-第三章 Vins-Fusion|视觉传感器部分(三):https://t.zsxq.com/13w0Aox6X
薛轲翰-第三章 Vins-Fusion|视觉传感器部分(四):https://t.zsxq.com/13bYuDYpu
薛轲翰-第三章 Vins-Fusion|视觉传感器部分(五):https://t.zsxq.com/13oPC5Hfv
薛轲翰-第四章 Vins-Fusion|惯性传感器部分(一):https://t.zsxq.com/1334sojYF
薛轲翰-第四章 Vins-Fusion|惯性传感器部分(二):https://t.zsxq.com/13RoIfRNx
薛轲翰-第四章 Vins-Fusion|惯性传感器部分(三):https://t.zsxq.com/138G1gbey
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (一) :https://t.zsxq.com/13Ilz5MkW
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (二) :https://t.zsxq.com/13ydjQgXv
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (三) :https://t.zsxq.com/13nDxxeix
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (四) : https://t.zsxq.com/13a6J4uuh
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (五) : https://t.zsxq.com/13Lu0dYvE
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (六) : https://t.zsxq.com/13gaSp7MV
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (七) : https://t.zsxq.com/13VPwF8wk
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (八) : https://t.zsxq.com/13PikUKsU
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (九) : https://t.zsxq.com/131xh8bov
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (十) : https://t.zsxq.com/13PrnQ92h
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (十一) : https://t.zsxq.com/13KBzrgXo
薛轲翰-第五章 Vins-Fusion|视觉惯性里程计 (十二) : https://t.zsxq.com/13bcJm6lq
薛轲翰-第六章 Vins-Fusion|回环融合(一): https://t.zsxq.com/13hEJtkaj
薛轲翰-第六章 Vins-Fusion|回环融合(二): https://t.zsxq.com/13Wa1YzuC
薛轲翰-第六章 Vins-Fusion|回环融合(三): https://t.zsxq.com/137rltEqA
薛轲翰-第七章 Vins-Fusion|全局优化(上篇): https://t.zsxq.com/13BCVJah3
薛轲翰-第七章 Vins-Fusion|全局优化(下篇): https://t.zsxq.com/13flvYleX

课程2:彻底搞懂ORB-SLAM3算法:理论+代码+实战
主讲老师:魏宏宇博士,东南大学博三在读,在IEEE Sensors Journal等期刊发表论文2篇,精通视觉惯性SLAM。「3D视觉从入门到精通」知识星球特邀嘉宾。课程大纲:
魏宏宇-ORB-SLAM3系列|绪论: https://t.zsxq.com/13ExTJGRd
魏宏宇-ORB-SLAM3系列|匹配算法一:https://t.zsxq.com/13XfAXY6m
魏宏宇-ORB-SLAM3系列之匹配算法(二)上篇:https://t.zsxq.com/13UWRxosO
魏宏宇-ORB-SLAM3系列之匹配算法(二)下篇:https://t.zsxq.com/13SBqgFUI
魏宏宇-ORB-SLAM系列|匹配算法(三)上篇:https://t.zsxq.com/13B68Md4n
魏宏宇-ORB-SLAM系列|匹配算法(三)下篇:https://t.zsxq.com/131DyQY4m
魏宏宇-ORBSLAM3系列之地图点(一):https://t.zsxq.com/133cKHB8j
魏宏宇-ORB-SLAM3系列代码讲解 地图点 专题二:https://t.zsxq.com/13hzmzNq8
魏宏宇-ORB-SLAM3系列|关键帧 上篇:https://t.zsxq.com/13w3mvF38
魏宏宇-ORB-SLAM3系列|关键帧 下篇:https://t.zsxq.com/13bv7Ksxu
魏宏宇-ORB-SLAM3系列|IMU专题一上篇:https://t.zsxq.com/13sQNqymT
魏宏宇-ORB-SLAM3系列|IMU专题一下篇:https://t.zsxq.com/13iWHEWVt
魏宏宇-ORB-SLAM3系列|IMU专题二:https://t.zsxq.com/13SOgz8kL
魏宏宇-ORB-SLAM3系列|IMU专题三 :https://t.zsxq.com/13zg76IH9
魏宏宇-ORB-SLAM3系列|优化专题(一) :https://t.zsxq.com/1305ZEC0j
魏宏宇-ORB-SLAM3系列|优化专题二(g2o与ceres)上篇:https://t.zsxq.com/13Ca1SB3D
魏宏宇-ORB-SLAM3系列|优化专题二(g2o与ceres)下篇:https://t.zsxq.com/131UNU5YX
魏宏宇-ORB-SLAM3系列|优化专题三(g2o)上篇:https://t.zsxq.com/13e6LmWM9
魏宏宇-ORB-SLAM3系列|优化专题三(g2o)下篇:https://t.zsxq.com/13lIq8rC5
魏宏宇-ORB-SLAM3系列|(上篇)小白如何手写g2o优化? 残差构建、雅克比推导、优化函数:https://t.zsxq.com/13ZS5QUk3
魏宏宇-ORB-SLAM3系列|(下篇)小白如何手写g2o优化? 残差构建、雅克比推导、优化函数:https://t.zsxq.com/13vWOtZr6
单鹏辉-ORB-SLAM3经典单目初始化模块原理及实现(一):https://t.zsxq.com/134on58WS
单鹏辉-ORB-SLAM3经典单目初始化模块原理及实现(二):https://t.zsxq.com/13EZWQ9mK
单鹏辉-ORB-SLAM3经典单目初始化模块原理及实现(三):https://t.zsxq.com/13TJir5ot
单鹏辉-ORB-SLAM3经典单目初始化模块原理及实现(四):https://t.zsxq.com/139vKS6dp
课程3:彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
苏赟博士,硕博毕业于机器人学国家重点实验室,在IROS,RAS等机器人领域顶级会议和期刊发表论文多篇,精通主流视觉SLAM和激光SLAM框架代码,曾收割大疆,华为等大厂offer。课程内容:
苏赟-绪论-多模态融合SLAM技术分享:https://t.zsxq.com/14OfHkhYc
苏赟-第一章-基础知识与开源框架分析(上篇):https://t.zsxq.com/14jZiS2ri
苏赟-第一章-基础知识与开源框架分析(中篇): https://t.zsxq.com/14pY7nQYv
苏赟-第一章-基础知识与开源框架分析(下篇): https://t.zsxq.com/146uwH5ko
苏赟-第二章 多传感器外参标定原理与代码解析(上篇):https://t.zsxq.com/145fTtEZL
苏赟-第二章 多传感器外参标定原理与代码解析(中篇):https://t.zsxq.com/14e8kj4ZT
苏赟-第二章 多传感器外参标定原理与代码解析(下篇): https://t.zsxq.com/14K55Z7Qa
三维重建课程:
主讲老师:shelo ,研究方向为基于深度学习的多视图立体匹配。主讲老师:李城,担任过知名企业的图形图像算法工程师,高精度地图算法工程师。主讲老师:视觉企鹅 ,武汉大学在读博士,精通多视图几何算法。课程内容包括:
李城-Structure from motion:https://t.zsxq.com/13VE8KYyn
书嘉-深度学习在多视图立体匹配中的应用 上篇:https://t.zsxq.com/13kvu3kPj
书嘉-深度学习在多视图立体匹配中的应用 下篇:https://t.zsxq.com/13lfthxq4
董浩南-多视图几何方式的三维重建 上篇:https://t.zsxq.com/13TsosJAe
董浩南-多视图几何方式的三维重建 下篇:https://t.zsxq.com/13TA2wP5y
舒畅-单目无监督深度估计综述:https://t.zsxq.com/13ggNReGI
张喆-多视图几何MVS简介:https://t.zsxq.com/13kEAjBLA
张喆-MVSNet三维重建学习预备知识与技能:https://t.zsxq.com/13yhADx1w
江腾飞-如何进行三维重建?从单帧深度估计到完整模型重建:https://t.zsxq.com/13vVqnKuI
自动驾驶课程:
课程1:面向自动驾驶领域的3D点云深度学习目标检测课程
主讲老师:王汐,北京理工大学自动化专业博士,曾在多家自动驾驶公司就职,有丰富的自动驾驶感知经验,精通主流视觉感知及点云三维感知方法,落地多个产品功能模块。本课程将系统以3D点云深度学习为主,对Point-based和Voxel-based系列的3D目标检测网络架构进行系统剖析和代码梳理,助力各位同学在点云深度学习更快的入门和更深的理解。课程内容:
王汐-第一章:3D目标检测|3D点云深度学习模型与实践-简介:https://t.zsxq.com/144MR5rh6
王汐-第二章:3D目标检测|基于Point方式的3D点云检测网络 (上篇):https://t.zsxq.com/14eIqmMlZ
王汐-第二章:3D目标检测|基于Point方式的3D点云检测网络 (下篇):https://t.zsxq.com/14rvvZRla
王汐-第三章:3D目标检测|基于Voxel方式的3D点云检测网络 (上篇):https://t.zsxq.com/14G0gTLpU
王汐-第三章: 3D目标检测|基于Voxel方式的3D点云检测网络 (下篇):https://t.zsxq.com/14Xm1o7x4
王汐-第四章: 3D目标检测|View-based和Voxel-based(上篇):https://t.zsxq.com/14sjmjDoh
王汐-第四章: 3D目标检测|View-based和Voxel-based(下篇):https://t.zsxq.com/14fAoWZCH
王汐-第五章:3D目标检测|PointPillar (上篇):https://t.zsxq.com/141ZTnVmx
王汐-第五章:3D目标检测|PointPillar (下篇):https://t.zsxq.com/14urBsuD6
王汐-第六章:3D目标检测|PVRCNN和其他Voxel-based模型(上篇):https://t.zsxq.com/14zcC67GN
王汐-第六章:PVRCNN和其他Voxel-based模型(下篇):https://t.zsxq.com/14c40cSFy
王汐-第七章:3D目标检测|点云-图像融合的深度学习网络(上篇):https://t.zsxq.com/14Vhbvguw
王汐-第七章:3D目标检测|点云-图像融合的深度学习网络 (下篇):https://t.zsxq.com/142sq73QE
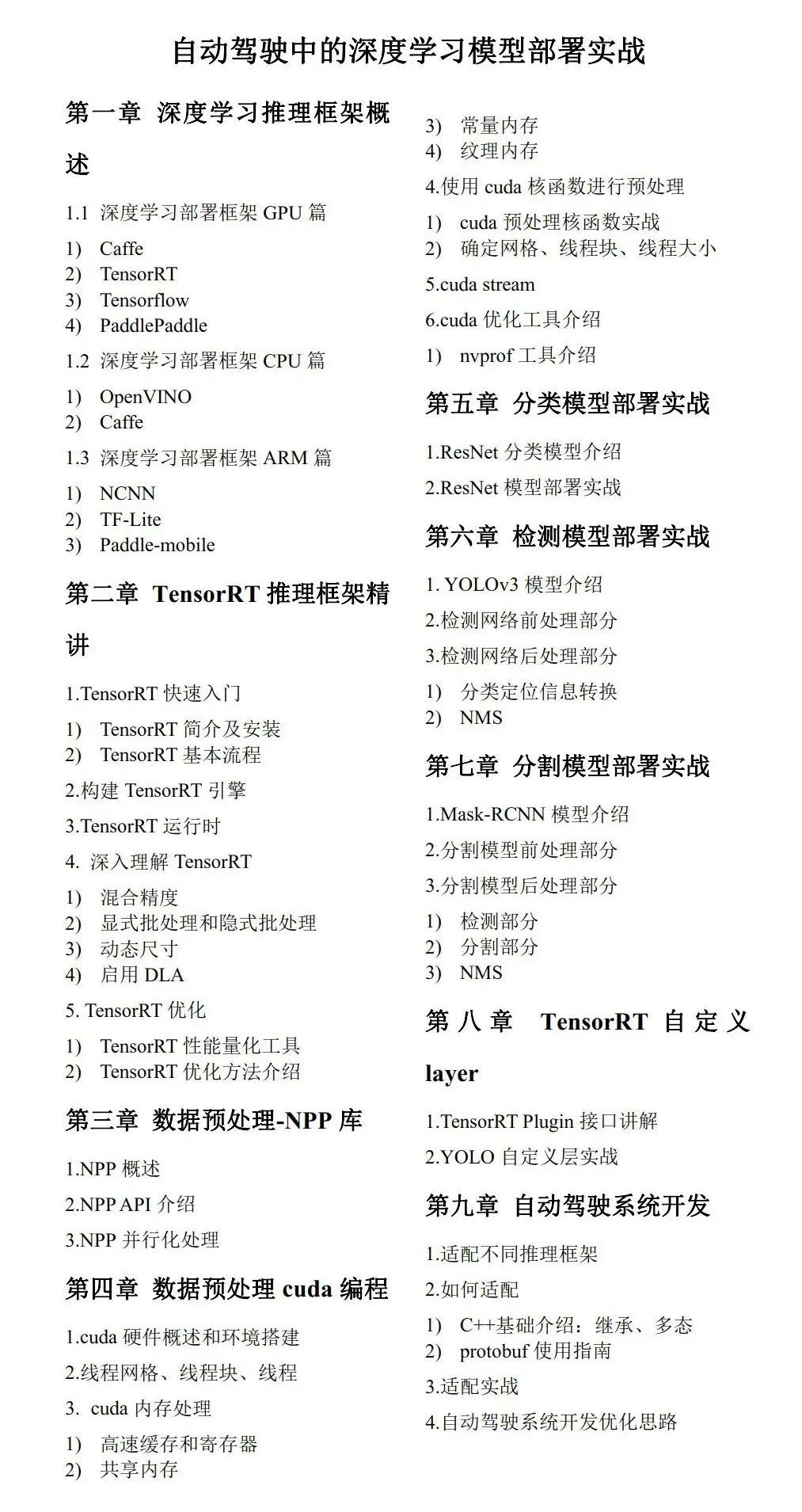
课程2:自动驾驶中的深度学习模型部署实战
课程讲师为毕业于哈尔滨工业大学的硕士,有10年C++编程经验,2018年开始接触深度学习模型部署,2019年加入一家大型自动驾驶公司。对TensorRT和GPU并行编程有深入理解。本课程将以深度学习模型部署为主线,带领大家掌握TensorRT的使用和cuda编程。课程内容:
张武举-第一章-自动驾驶中的深度学习模型部署实战(上篇):https://t.zsxq.com/149fPT8Gs
张武举-第一章-自动驾驶中的深度学习模型部署实战(下篇):https://t.zsxq.com/14qQdwZOU
张武举-第二章 深度学习模型部署实战|TensorRT推理框架精(上篇):https://t.zsxq.com/142ARHvOe
张武举-第二章 深度学习模型部署实战|TensorRT推理框架精(中篇):https://t.zsxq.com/14pVJnbGa
张武举-第二章 深度学习模型部署实战|TensorRT推理框架精(下篇):https://t.zsxq.com/14SDb6MJW
...
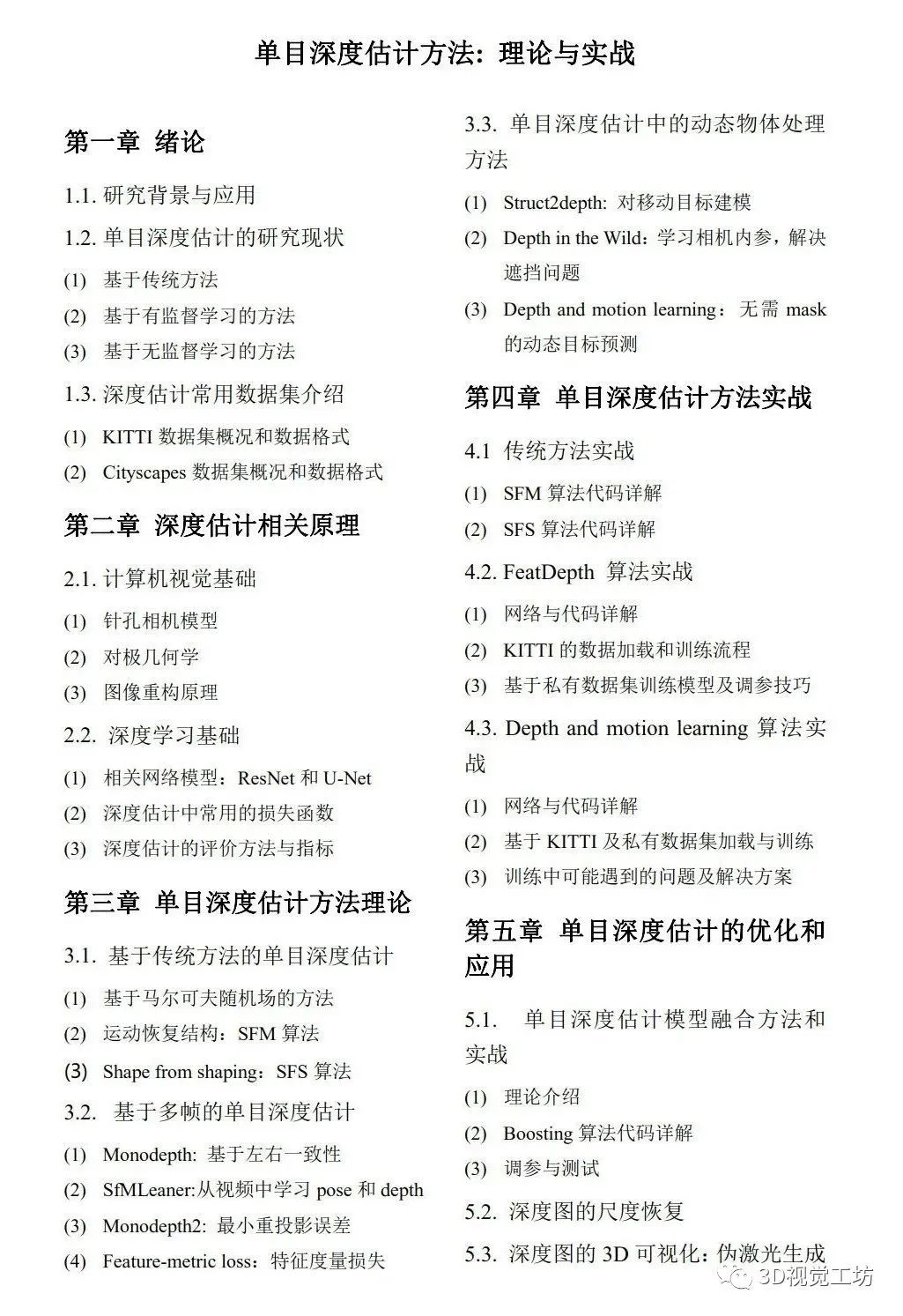
课程3:单目深度估计方法:理论与实战
《单目深度估计方法:理论与实战》课程主要分为两大部分:理论篇和实战篇,由两位知名自动驾驶公司的高级算法工程师教授。由于有监督方法的深度真值获取困难,且无监督方法的效果与有监督方法几乎相当,我们将课程的重心放在了无监督方法上。其中,理论篇主要包括:深度估计相关的损失函数、评价指标等基础理论,传统深度估计方法、无监督深度估计方法等理论知识。实战部分包括:传统深度估计方法和深度学习方法,偏向于无监督深度估计以及相关应用等等。课程内容:
语嫣-第一章-如何高效学习单目深度估计(上篇):https://t.zsxq.com/14BMTIqq5
语嫣-第一章-如何高效学习单目深度估计(下篇):https://t.zsxq.com/14gmoHOr5
语嫣-第二章-深度估计相关原理(上篇):https://t.zsxq.com/14iQdBnMF
语嫣-第二章-深度估计相关原理(下篇): https://t.zsxq.com/14Sw2TV7y
...
其他课程:
课程1:求职经验分享
张凡-2023年, 我的秋招经历那些事:https://t.zsxq.com/13VfXLlYq
课程2:新加坡国立大学csc公派留学经验分享
双十一特惠福利(仅三天)




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









