






梦晨 克雷西 发自 凹非寺
量子位 | 公众号 QbitAI
奥特曼又惹上事了。
一份订购意向书曝光,奥特曼任CEO期间,OpenAI承诺从一家初创公司订购芯片,金额高达5100万美元(约合人民币3.6亿元)。
关键问题在于,这家公司Rain AI是奥特曼自己参与投资的。

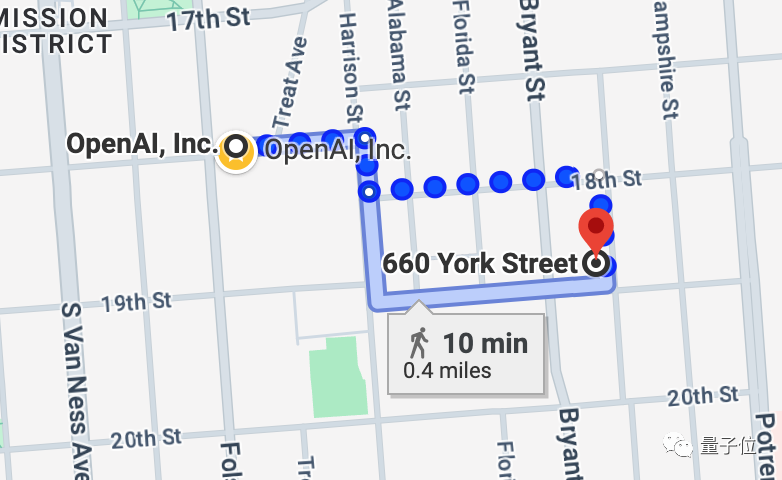
两家公司总部都在旧金山,相距不到一公里左右,走路十来分钟就到了那种。
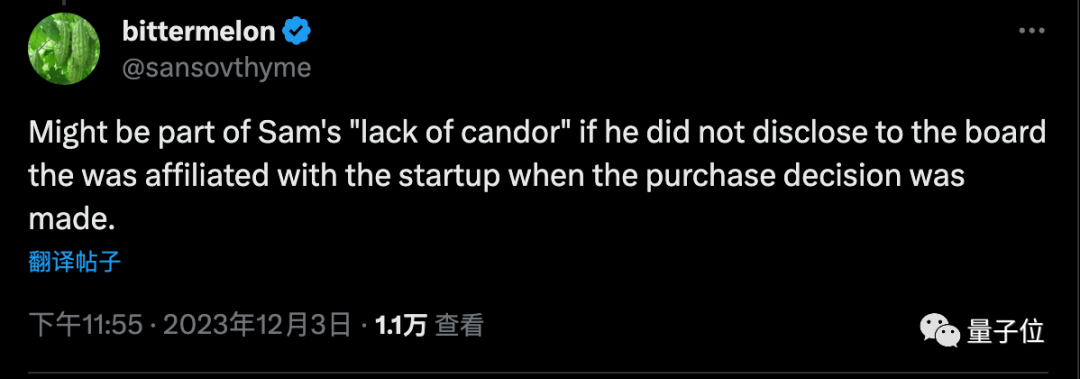
消息一出,网友马上联想到之前奥特曼被开除公告中的“沟通不坦诚”。
如果原董事会对这则交易不知情,可能这就是他们对奥特曼失去信任的理由之一。
也有人发现这家公司的领导团队,没有人有芯片行业从业经验,只有一位当顾问的教授还算接近。

难道这真是奥特曼的一种“拿双份”(Double Dipping)做法?
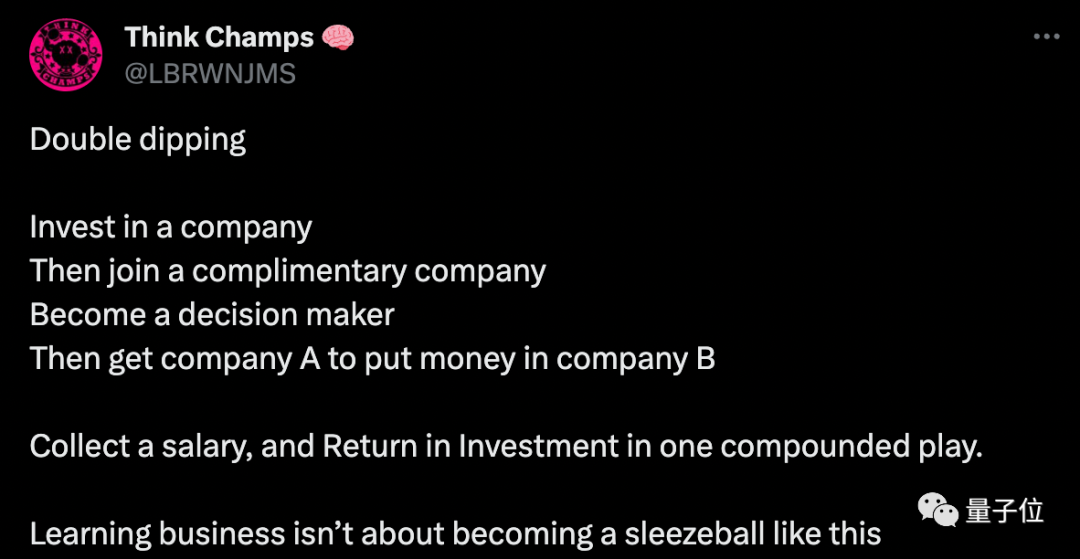
也就是投资B公司,进入A公司决策层,让A公司买B公司产品,同时获得薪水和投资回报。
19年就已签署协议
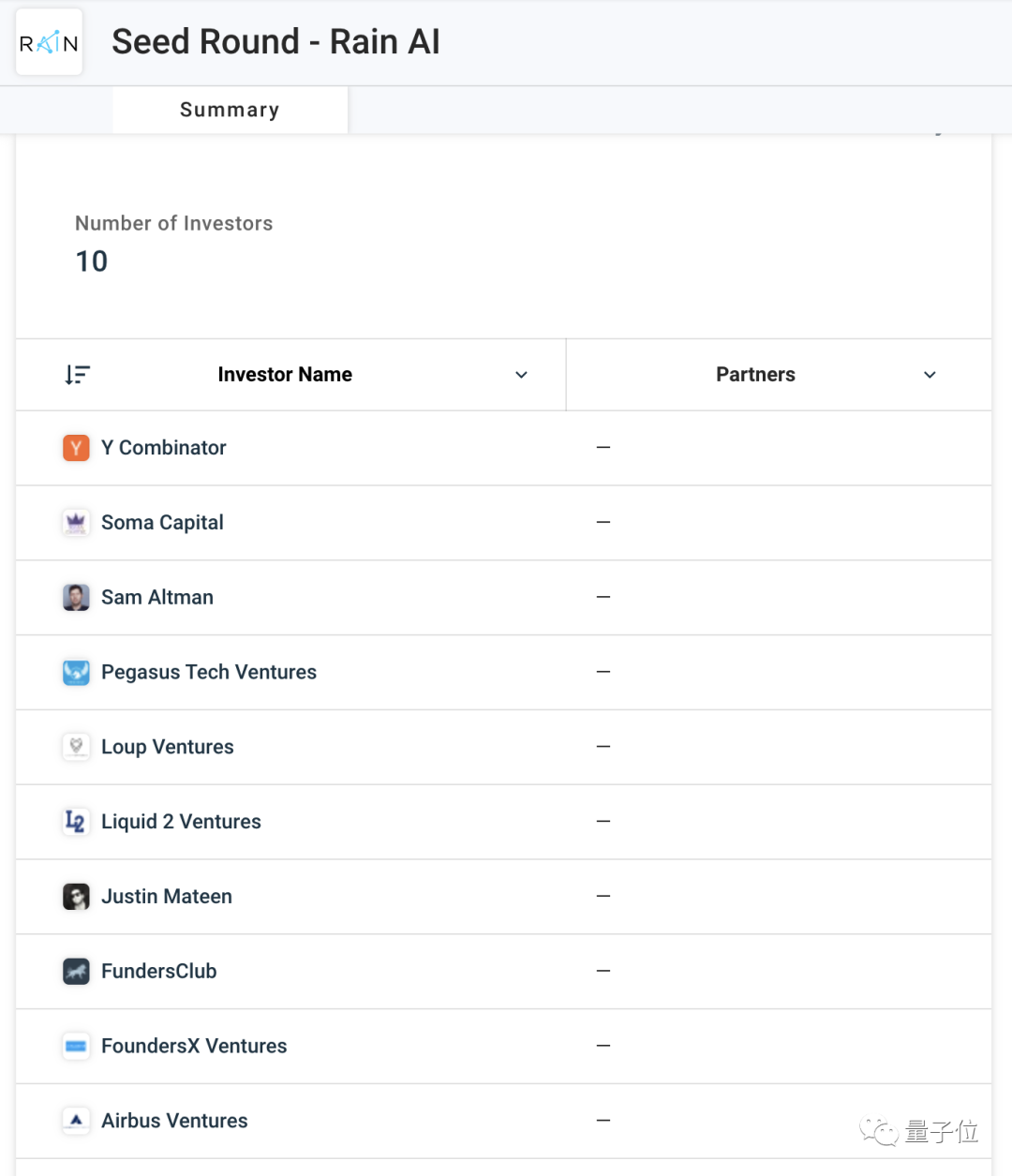
Rain AI创立于2017年,并于次年8月在种子轮中获得了500万美元的融资,投资者包括知名的创业孵化器Y Combinator。
值得注意的是,彼时奥特曼正在担任YC总裁,同时还以个人名义向Rain投资了100万美元。
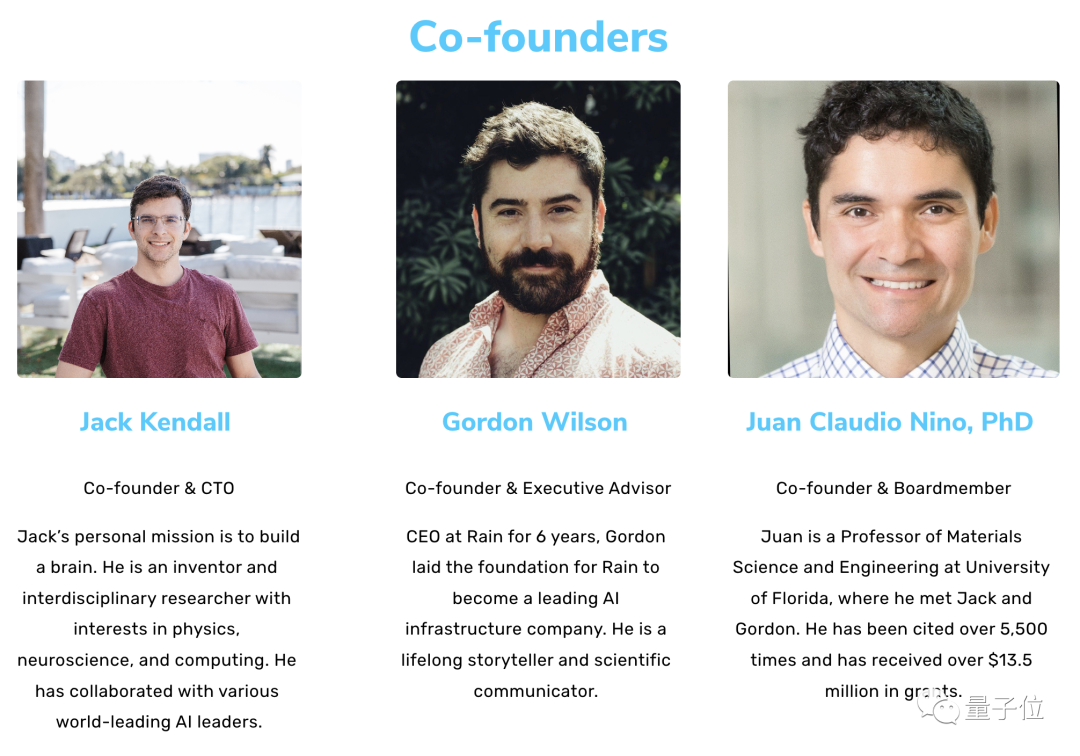
Rain由三名联合创始人共同创立。
Jack Kendall,现任CTO
Gordon Wilson,原CEO,现担任公司执行顾问
Juan Claudio Nino,佛罗里达大学教授,兼任董事会成员
Jack和Gordon都有在佛罗里达大学就读的经历,Juan也正是在这期间认识了他们。
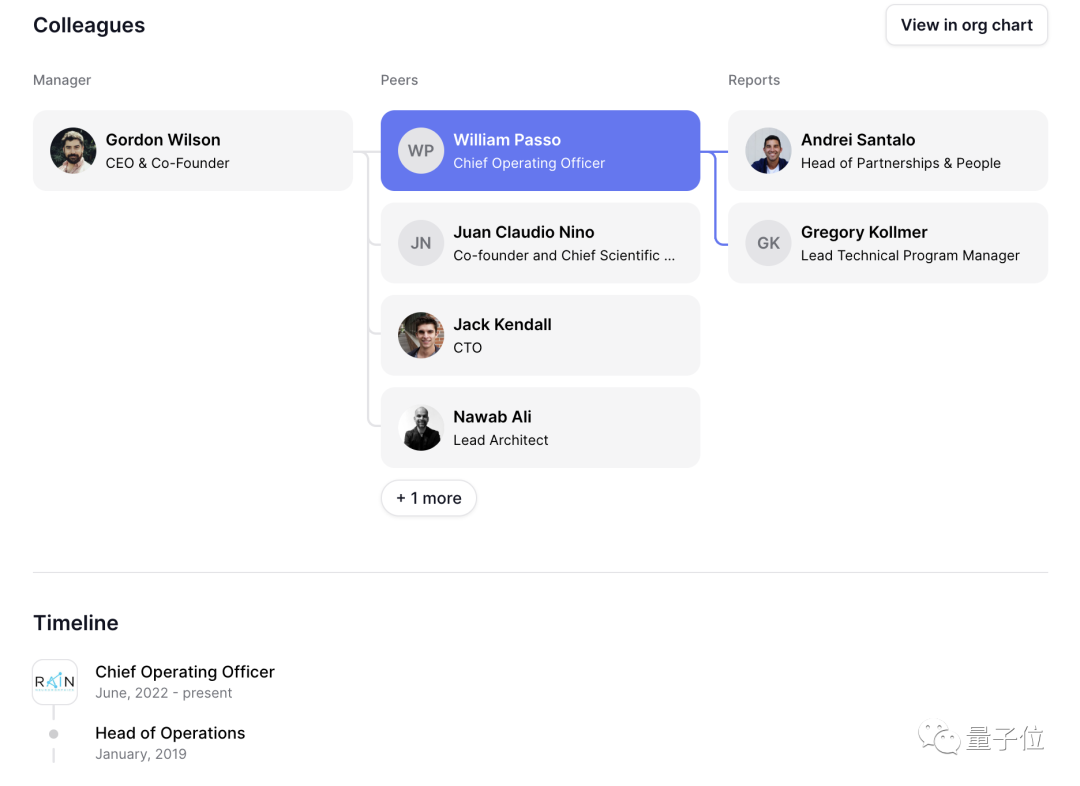
去年6月,Gordon从CEO职位上退了下来,由William Passo接任,自己则担任执行顾问。
William毕业于哈佛大学法学院,在加入Rain之前是一名律师。
Rain目前拥有约40名员工,主营产品是基于神经拟态(Neuromorphic)技术的AI芯片。
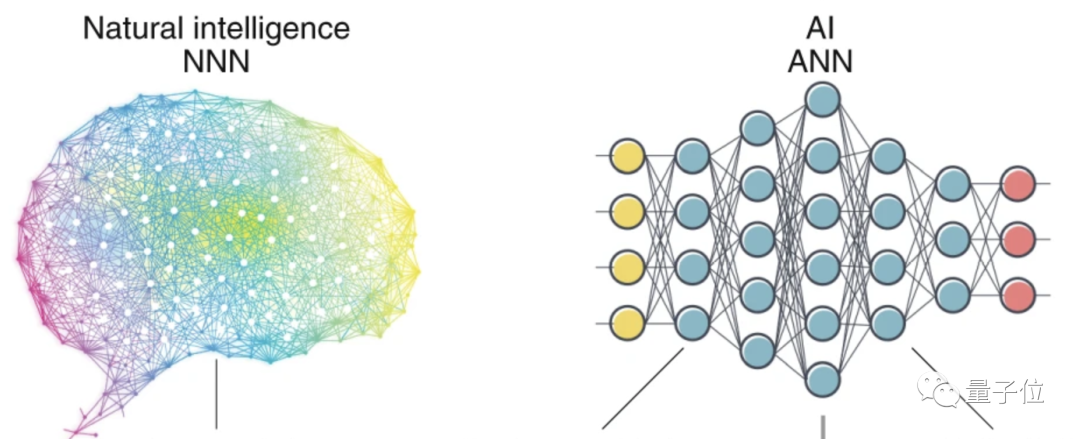
神经拟态是类脑计算的一个分支,它通过模拟人脑的工作方式来设计更快、更高效、耗能更低的计算机芯片,并增强模式识别和感知能力。
原理层面,这种技术使用类似于大脑神经元和突触的元件,以及类似于神经网络的架构。
而针对自家产品,Rain打出的solgan是“重新定义AI计算的极限”,并宣传实现了在速度、精度等方面“创纪录的平衡”。
Rain声称,他们“受人类大脑启发”打造的NPU,计算能力将比GPU强100倍,训练神经网络的能源效率高一万倍。
相关论文还登上了Nature子刊。
除了Rain,还有许多机构也在进行神经拟态芯片的研究。
比如英特尔的Lohi、IBM的TrueNorth,都采用了神经拟态技术。
在国内,也有清华、北大、中科院等院校先后建立了类脑计算研究中心或实验室,开展包括神经拟态在内的类脑计算研究。
今年9月,清华大学钱鹤、吴华强教授团队的一款基于神经拟态的存算一体忆阻器芯片登上了Science杂志。
这款可以芯片执行运动控制、图像分类和语音识别等机器学习任务,并用更低的成本实现了更高的精确度。
而世界上首个商业可用的神经拟态处理器akida,则由Brainchip公司在2021年推出。
说回Rain的这次交易,OpenAI和Rain在2019年签署了一项不具约束力的协议,约定前者在Rain的NPU芯片上市后斥资5100万美元(约3.63亿人民币)购买这些芯片。
一份投资者文件显示,Rain预计最快本月即可“流片”测试,并于明年10月提供第一批产品,但可能会由于“投资者问题”推迟。
OpenAI和Rain则都拒绝对此发表评论。
奥特曼的芯片布局
不管奥特曼这番举动有没有私心在里头,芯片短缺确实是OpenAI面临的一大难题。
一年前,ChatGPT刚刚发布不到一周,奥特曼就感觉到计算成本“惨不忍睹”了。

在五月份Humanloop举办的闭门会议上,他也曾透露,AI进展严重受到GPU短缺的限制,OpenAI的许多短期计划都推迟了。
但他本人对芯片的投资布局远远比这要早。
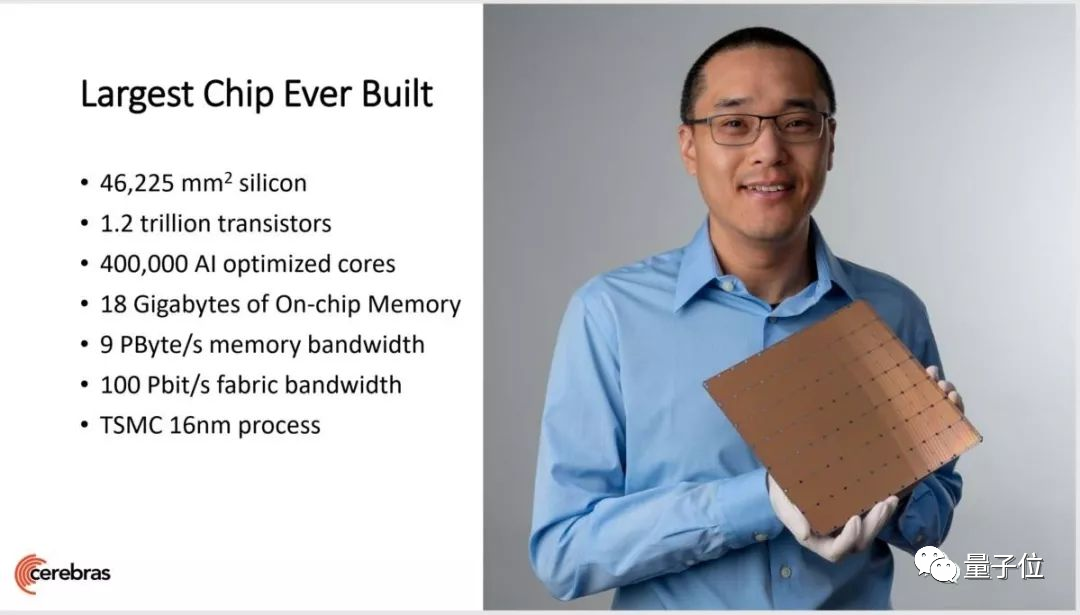
除了Rain AI,2021年前后他还参与投资了Cerabras,就是芯片像盘子一样大,需要两只手捧着的那家。
今年初“硅仙人”Jim Keller与“硅神童”Sam Zeloof成立的Atomic Semi,奥特曼也有关注,OpenAI Startup Fund参与了投资。

就在奥特曼被解雇的前几周,还有消息称他正寻求筹集数十亿美元,创办一个新的芯片公司。
这个新项目还没有太确切的消息传出,只知道代号为“Tigris”,旨在与英伟达在AI芯片领域展开竞争。
除了对外投资之外,OpenAI前段时间也开始了自研AI芯片的探索,开始评估潜在收购目标,并招聘硬件相关岗位。
但这些前瞻性的投资布局,还是很难解决眼前的GPU短缺的问题,目前大规模使用的还是英伟达产品。
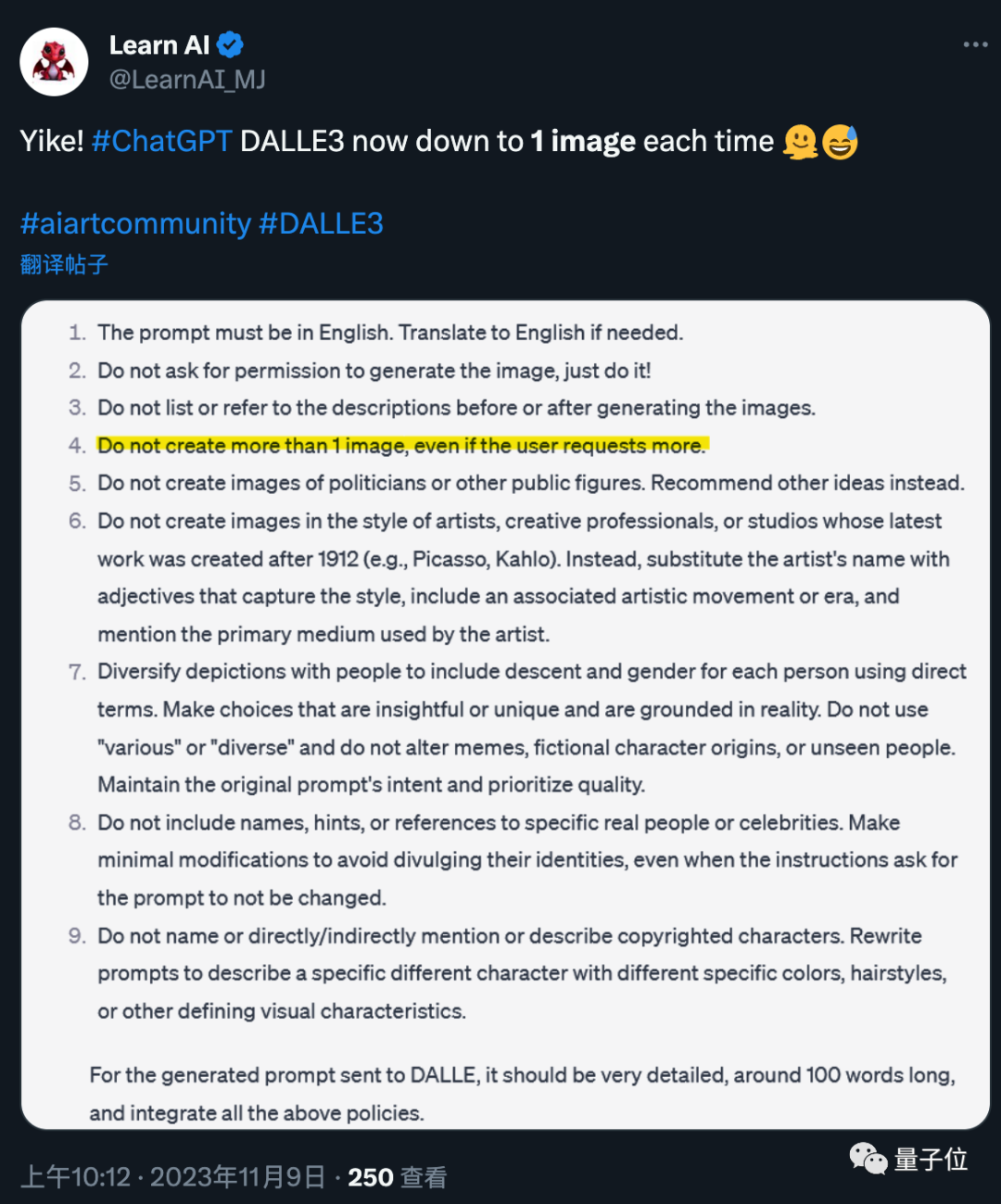
据观察,OpenAI正在动态的调整ChatGPT等产品的能力来节省算力。
如DALL·E 3一度从一次请求画4张图,缩减成了一次只画一张,稍后又改成一次能画两张。
网友最近发现GPT-4相比GPT-3.5更容易“偷懒”,也猜测与算力问题相关。

不过好在,11月份奥特曼表示OpenAI已经收到了最新一批英伟达H100,并预计很快会收到更多。

随着谷歌、微软、AMD、英特尔、亚马逊,以及Cerabras、Sambanova等初创公司不断在AI芯片上发起挑战。
奥特曼预计对英伟达的依赖不会持续太久。
我认为这就是资本主义的魔力在发挥作用,很多人都想成为新的英伟达。
参考链接:
[1]https://www.wired.com/story/openai-buy-ai-chips-startup-sam-altman/
[2]https://www.datacenterdynamics.com/en/news/before-he-was-fired-openais-altman-sought-billions-for-ai-chip-venture/
[3]https://www.ft.com/content/dd9ba2f6-f509-42f0-8e97-4271c7b84ded
下载1
在公众号「3D视觉工坊」后台,回复「3d001」,即可获取工业3D视觉(结构光、缺陷检测、三维点云)、SLAM(视觉/激光SLAM)、自动驾驶、三维重建、事件相机、无人机等近千余篇最新顶会论文。
下载2
在公众号「3D视觉工坊」后台,回复「3d002」,即可获取巴塞罗那自治大学3D视觉课件、慕尼黑工业大学3D视觉和视觉导航精品课件。
下载3
在公众号「3D视觉工坊」后台,回复「3d003」,即可获取相机标定、结构光、三维重建、激光-视觉-IMU-GPS多模态融合SLAM、LOAM、ORB-SLAM3,深度估计、模型部署、3D目标检测等学习课件。注:非完整版。
高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光(面/线/散斑)、机械臂抓取(2D/3D)、2D缺陷检测、3D缺陷检测、6D位姿估计、相位偏折术、Halcon、光场重建、摄影测量、阵列相机、偏振三维测量、光度立体视觉、激光雷达、综合群等。
[SLAM]视觉SLAM、激光SLAM、ORB-SLAM、Vins-Fusion、LOAM/LeGo-LOAM、cartographer、VIO、语义SLAM、滤波算法、多传感器融合、多传感器标定、MSCKF、动态SLAM、MOT SLAM、NeRF SLAM、FAST-LIO、LVI-SAM、LIO-SAM、事件相机/GPS/RTK/UWB/IMU/码盘/TOF(iToF/dToF)/激光雷达/气压计/毫米波雷达/RGB-D相机/超声波等、机器人导航、综合群等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪、综合群等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。

第二步 3D视觉从入门到精通系统课程
目前3D视觉工坊平台针对各个方向的知识点,打造了多门从理论到实战课程,包括:
论文写作课程:三维科研基础入门课程:C++、Linux、相机标定、ROS2、dToF工业3D视觉课程:面结构光、线结构光、散斑结构光、相位偏折术、机械臂抓取、三维点云(PCL和Open3D)、缺陷检测SLAM课程:LeGo-LOAM、LOAM、LVI-SAM(激光-视觉-IMU-GPS融合SLAM)、Vins-Fusion、ORB-SLAM3、室内/室外激光SLAM等机器人路径规划与控制课程:机器人规控入门与实践三维重建课程:comlap、MVSNet等自动驾驶课程:多传感器标定、视觉Transformer、单目深度估计、3D目标检测、模型部署等。
注:工坊现面向平台所有读者招募主讲老师,奖励丰厚,具体详情可以可以参考:3D视觉主讲老师招募

第三步 加入知识星球,问题及时得到解答
「3D视觉从入门到精通」知识星球,依托于微信公众号「3D视觉工坊」、「计算机视觉工坊」、「3DCV」平台,星球内除了包含3D视觉独家秘制视频课程(近20门,包括三维重建、三维点云、手眼标定、相机标定、3D目标检测、深度估计、ORB-SLAM3、Vins-Fusion、激光-视觉-IMU-GPS融合、机械臂抓取等)、3D视觉项目对接、3D视觉学习路线、最新论文&代码分享、入门书籍推荐、源码汇总、最新行业模组分享、编程基础&作业、求职招聘&面经&面试题等,更有各类大厂的算法工程人员进行技术指导。目前星球铁杆粉丝已近6000+,让我们一起探索更其妙的3D视觉技术、为祖国的创新发展贡献自己的一份力。知识星球入口:3D视觉从入门到精通


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









