






最新:秋招情况,作者:城哥 | 整理:Datawhale
秋招接近尾声了,各家大厂也陆续开奖了。
接下来我就结合牛客网和 OfferShow 的数据,给大家汇总一下,这届秋招各家公司的薪资情况。
阅读声明:
1、数据来源于牛客网和 OfferShow,这些数据都是用户匿名自发上传的,所以不能保证数据 100% 正确。
2、愿意分享数据的同学,通常是薪资比较高的同学,所以大家理性看待,这是典型的“幸存者偏差”,所以大家不用过度解读,了解一下。
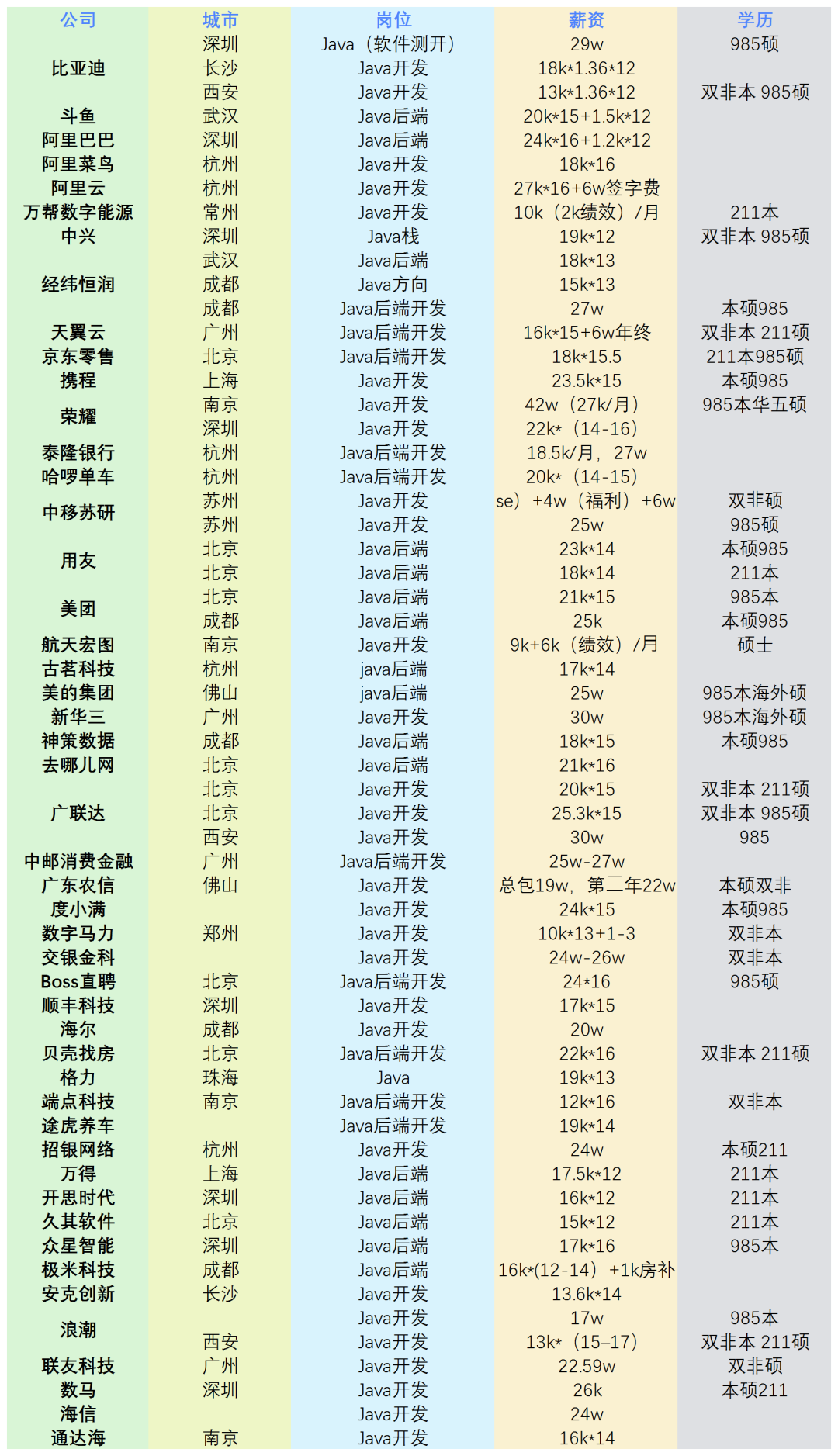
薪资情况
| 公司名 | 薪资 | 应聘岗位 | 学校/学历 | 地点 |
|---|---|---|---|---|
| 淘天 | 32K*12 | 算法工程师 | 985/硕士 | 杭州 |
| 小红书 | 薪资+加班费+期权+签字费大于60W | 后端开发 | 985/本科 | 上海 |
| 科大讯飞 | 26K*(14-15) | 后端开发 | 985/硕士 | 合肥 |
| 阿里国际 | 31K*16 | 算法工程师 | 985/硕士 | 广州 |
| 中兴 | 32K*14 | 算法工程师 | 985/硕士 | 北京 |
| 地平线 | 27K*15 | 测试开发工程师 | 211/硕士 | 南京 |
| 阿里控股 | 28K*16 | 算法工程师 | 985/硕士 | 杭州 |
| 阿里大文娱 | 24K*16 | 后端开发 | 985/硕士 | 广东 |
| 携程 | 21K*15 | 后端开发 | 985/硕士 | 上海 |
| 饿了么 | 30K*16 | 算法工程师 | 985/硕士 | 杭州 |
| 去哪儿 | 20K*16 | Java开发 | 211/硕士 | 北京 |
| tplink | 30K*16 | 图像算法工程师 | 硕士(海归) | 深圳 |
| 美团 | 35K*15.5 | 算法工程师 | 985/硕士 | 北京 |
| 中国银行 | 总包13W | 软件开发 | 985/硕士 | 西安 |
| 金山办公 | 18K*14 | 后端开发 | 211/本科 | 武汉 |
| 小米 | 18K*15 | 软件开发 | 985/硕士 | 南京 |
| 富途 | 24K*15.5 | 后端开发 | 双一流/硕士 | 深圳 |
| 海康威视 | 17K*15 | 软件开发 | 211/硕士 | 杭州 |
| 用友 | 30K*14 | Java开发 | 双一流/硕士 | 北京 |
| 得物 | 26K*16 | 前端开发 | 211/本科 | 上海 |
| 顺丰科技 | 15.5K*14 | 后端开发 | 211/硕士 | 深圳 |
| 大华 | 20K*14 | Java开发 | 985/硕士 | 杭州 |
| 数字马力 | 15K*13 | 嵌入式开发 | 985/本科 | 深圳 |
| 人大金仓 | 13K*12 | 数据库研发 | 双非/硕士 | 青岛 |
| 兴业银行 | 总包 17W | 后端开发 | 211/硕士 | 大连 |
| 浪潮 | 总共 20W | Java开发 | 211/硕士 | 济南 |
| 贝壳找房 | 23K*16 | Java开发 | 985/本科 | 北京 |
| 招银网络 | 总包 26W | 软件开发 | 985/硕士 | 成都 |
大家可以对比一下 23 届秋招的情况,看看同一家公司、同一个岗位、差不多学历的情况下,有哪些差异。
我们就拿用友这家“泛”互联网中厂来说吧,薪资待遇比较贴近大多数小伙伴的诉求。像得物、小红书等今年开的比较离离离谱,不少小伙伴可能会觉得不好比较。
23 届的时候,用友、北京、Java 后端、23kX14,本硕985。
24 届的时候,用友、北京、Java 后端、 30kX14, 硕士双一流。
虽然样本直接进行比较会存在一定的偏差,但多多少少还是能看出来一些差异的,那就是 24 届似乎倒挂了 23 届。
PS:好像每年都有程序员在统计岗位薪酬,但是运营和产品岗位上统计的人却很少。虽然常规意义上程序员岗位要比运营岗位的薪酬要高很多,但是如果有统计的话,也可以多一些借鉴价值。
作者简介
城哥,公众号9年博主,一线互联网工作10年、公司校招和社招技术面试官,主导多个公司级实战项目(数据分析挖掘、算法、AI平台建设、大模型等
笔者推荐
3D视觉岗求职群(知识星球)是一个面向全体学生和算法工程师/研究员的求职交流平台。主要分享3D视觉岗社招/校招准备攻略、面试题、面试经验、招聘信息、内推机会、学习路线、求职答疑、offer选择、职场修炼、项目对接、技术提升等。
求职群涉及工业3D视觉(立体视觉、三维点云、机械臂抓取、结构光、相机标定、缺陷检测、三维测量)、视觉/激光SLAM(定位、建图、导航、AI感知)、自动驾驶领域(传感器标定、规划控制等)、三维重建、无人机、C++等方向。
求职群里既有23/24届和往届求职的大佬/学生,也有对求职规划很迷茫的刚入学的学生,还有很多公司里的技术大牛、研究员和算法工程师。成员和嘉宾来自海康威视、梅卡曼德、百度、旷视、华为、奥比中光、云从、阿丘科技、商汤、美团、大疆、智加等众多知名企业。众多经验和见解,让你在求职过程中少走弯路。

下载
在公众号「3D视觉工坊」后台,回复「 3dcv」,即可获取工业3D视觉、SLAM、自动驾驶、三维重建、事件相机、无人机等近千余篇最新顶会论文;巴塞罗那自治大学和慕尼黑工业大学3D视觉和视觉导航精品课件;相机标定、结构光、三维重建、SLAM,深度估计、模型部署、3D目标检测等学习资料。
3D视觉方向交流群成立啦
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
[SLAM]视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理微信:dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。






















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









