



我发现3D视觉的学习资料好少呀,师兄,你有啥比较不错的学习资料推荐吗?
思考了片刻,师兄站起身,望向窗外,平静的回答师妹的问题:
师妹,给你推荐一个我读研三年期间一直默默关注的知识星球:「3D视觉从入门到精通」,依托于微信公众号「3D视觉工坊」、「计算机视觉工坊」、「3DCV」三个平台。这三天加入的话,好像还有一个新人优惠活动,你可以关注一下。

师妹充满疑惑的看着师兄:
我之前一直关注的是「3D视觉工坊」的知乎和哔哩哔哩,时常会更新很多最新的论文和科研技术,倒是不知道他们还有公众号和知识星球,我来看看。
说完,师妹迅速地在微信搜索中,找到了「3D视觉工坊」微信公众号,顺手点了关注,快速看了一眼公众号菜单栏。
师兄,我看了一眼公众号,里面有提到他们的小鹅通平台课程:www.3dcver.com
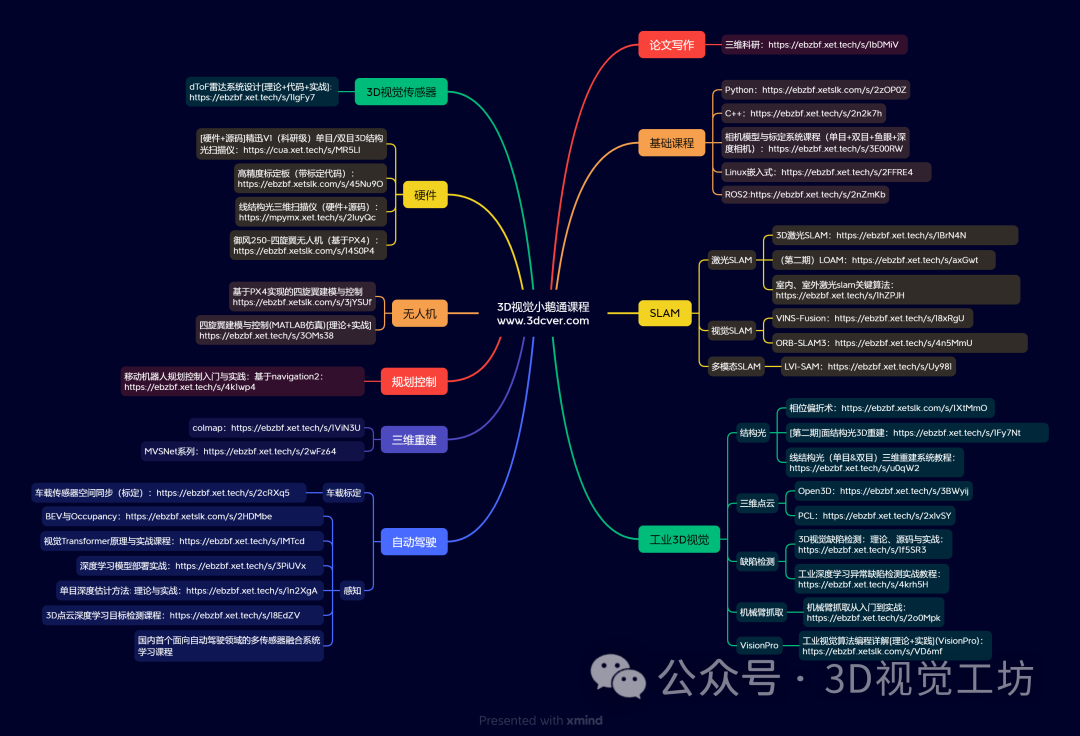
这个小鹅通里面的课程,我看挺多的,很多也是我感兴趣的,师兄,你刚才说的「3D从入门到精通」知识星球,和这个小鹅通课程有啥区别呢?
正好今天周末,师兄正好手头上事情不多,他不急不慢地回答道:
工坊的小鹅通课程我之前也买了几个,包括:北大张喆主讲的《基于深度学习的三维重建MVSNet系列 [论文+源码+应用+科研]》、天涯居士主讲的《[第二期]从零开始搭建搭建一套面结构光3D重建系统[理论+源码+实践]》。
小鹅通课程有个好处,便是主讲老师对某一块知识体系非常了解,你购买该课程后,可以获取课程对应的课件和代码资料,有问题再答疑群里提问,一般老师空的时候都会给你详细地解答。
当然,知识星球的优势也是很多的,我这会儿正好有空,要不我给你详细讲讲这个星球吧,我之前在里面呆了快三年了,对里面内容还是比较熟悉的。
师妹开心地坐到师兄对面的座位上,仔细地听着师兄进一步的介绍。
什么是「3D视觉从入门到精通」知识星球?
「3D视觉从入门到精通」知识星球是国内超一流的3D视觉学习交流社区,内容主要围绕这五大方向:工业3D视觉、SLAM、自动驾驶、三维重建、和无人机方向,已有5500+活跃成员。

知识星球嘉宾
嘉宾阵容非常强大,有40多位大厂算法工程师,顶尖高校和研究院专家。
星球嘉宾和成员主要来自于:清华大学、上海交通大学、北京大学、华中科技大学、武汉大学、南京大学、北京理工大学、北京航空航天大学、香港科技大学、香港理工大学、苏黎世联邦理工学院、慕尼黑工业大学等国内知名研究所和大厂算法工程师
合作企业
星球内主要内容
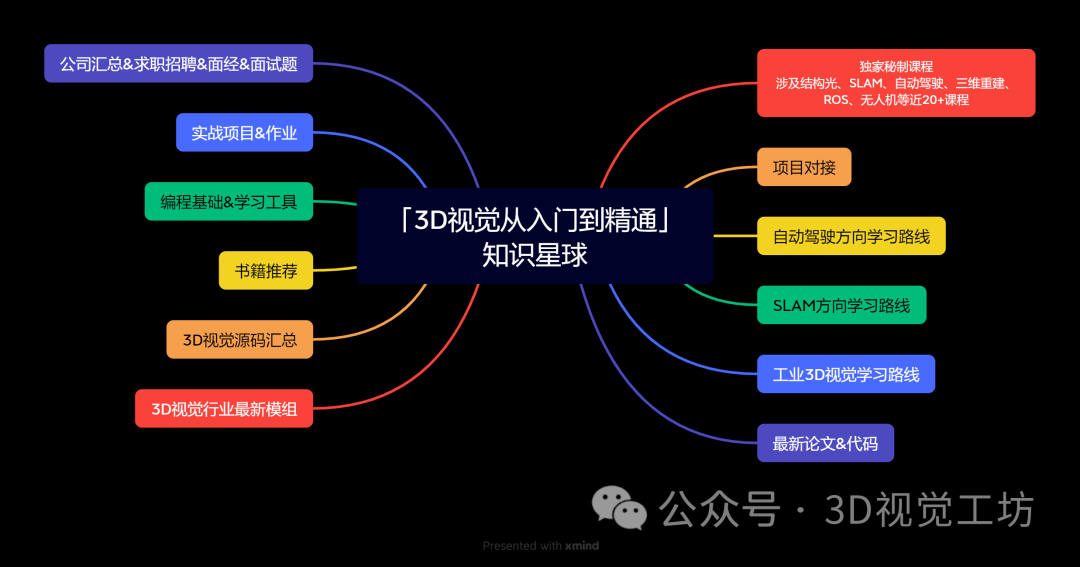
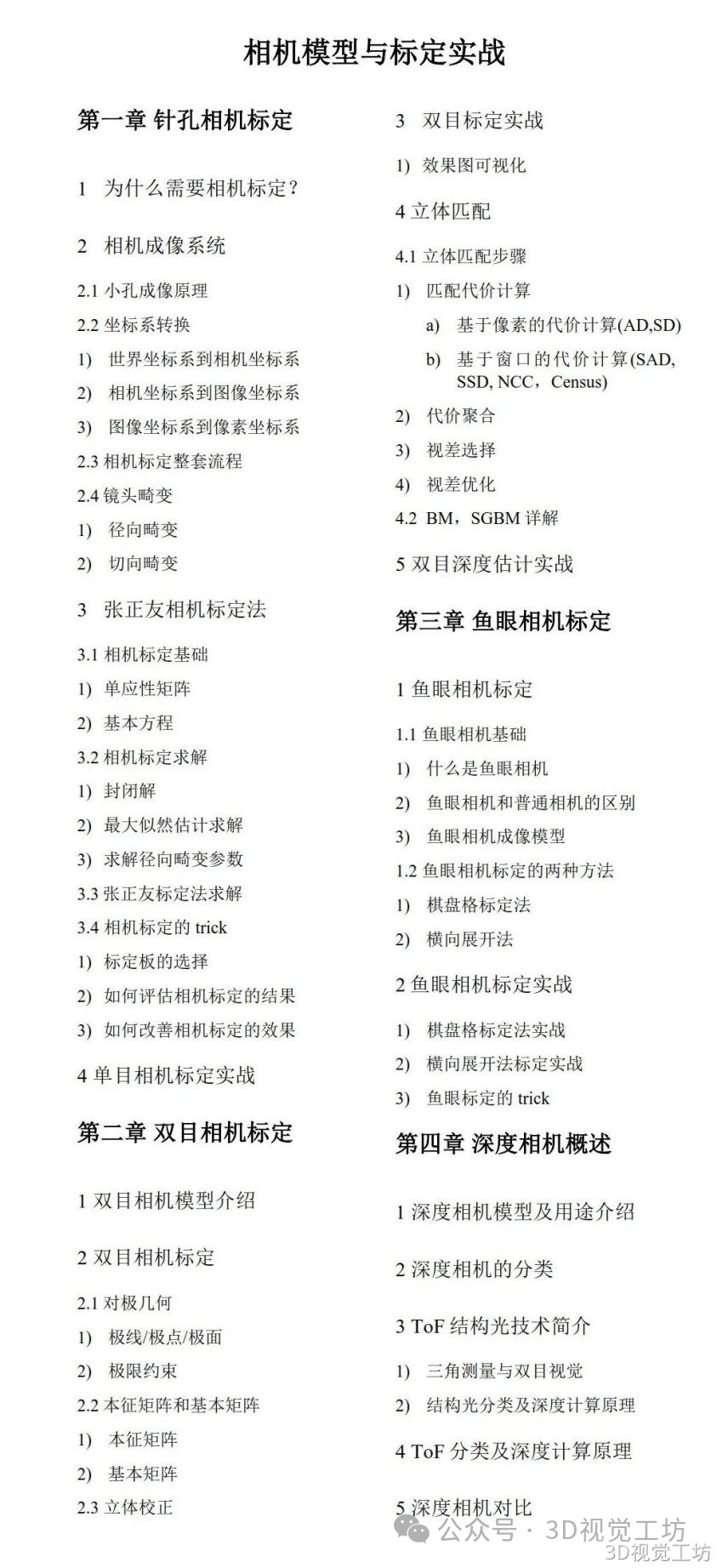
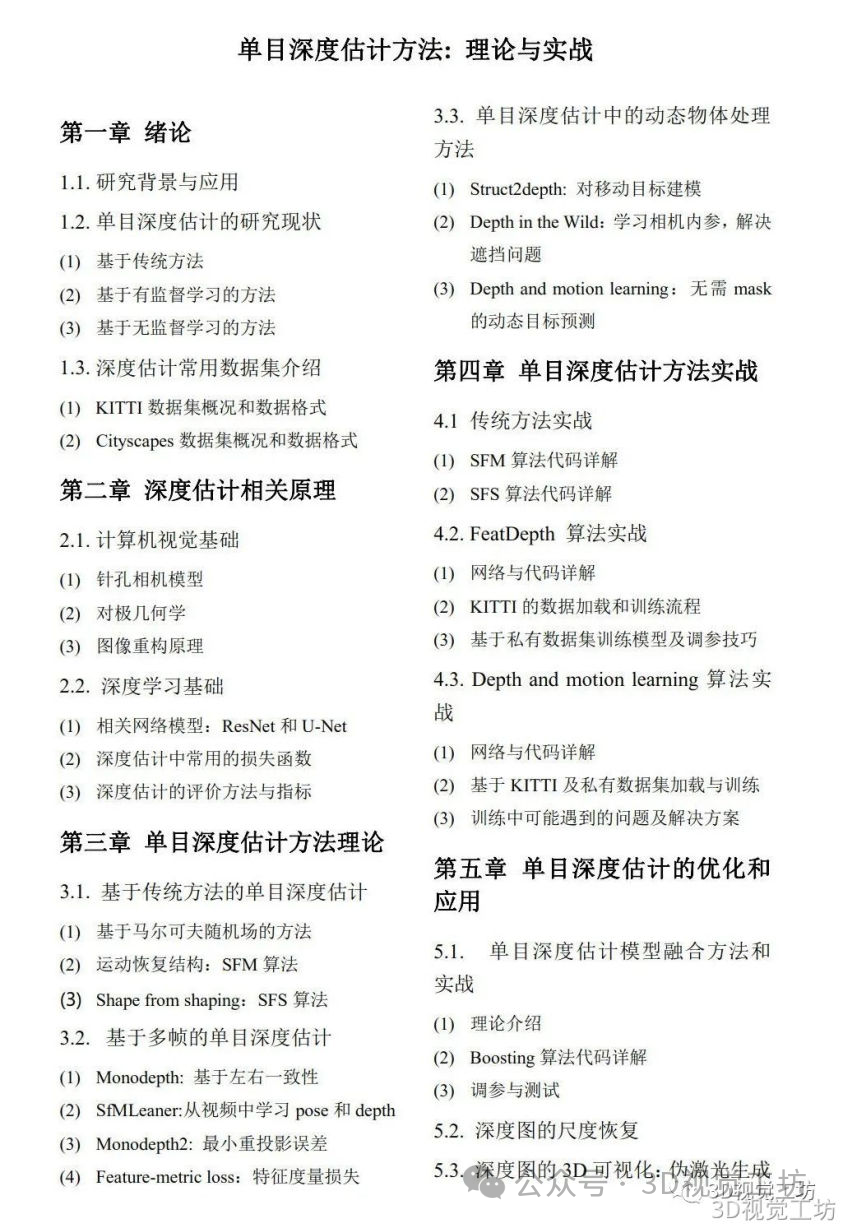
星球内系列视频课程

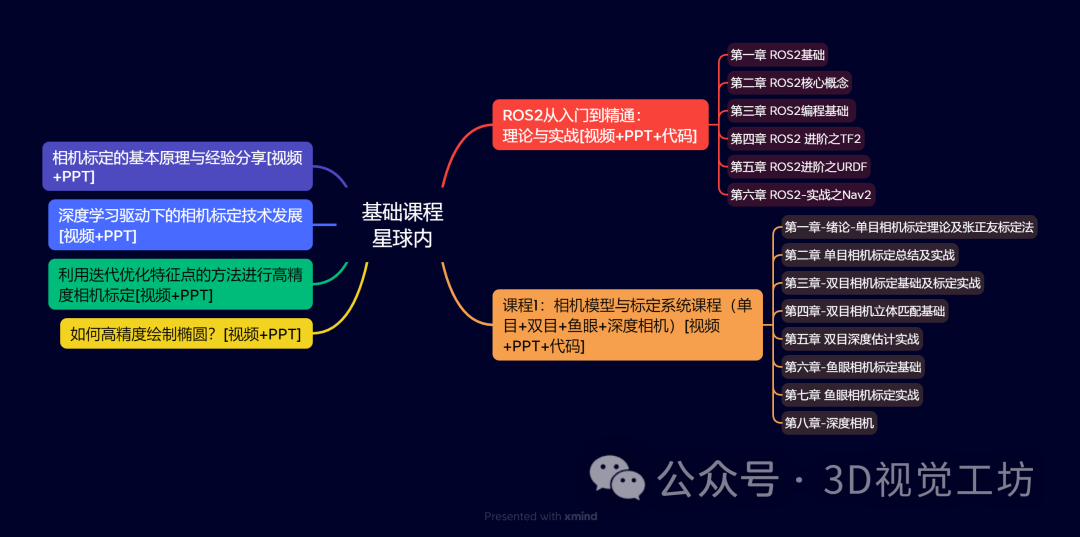
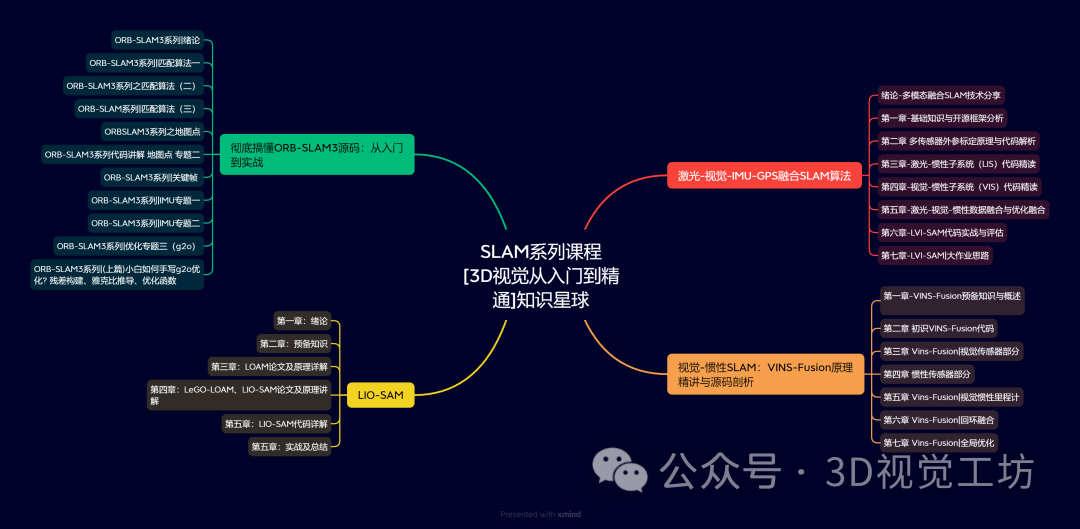
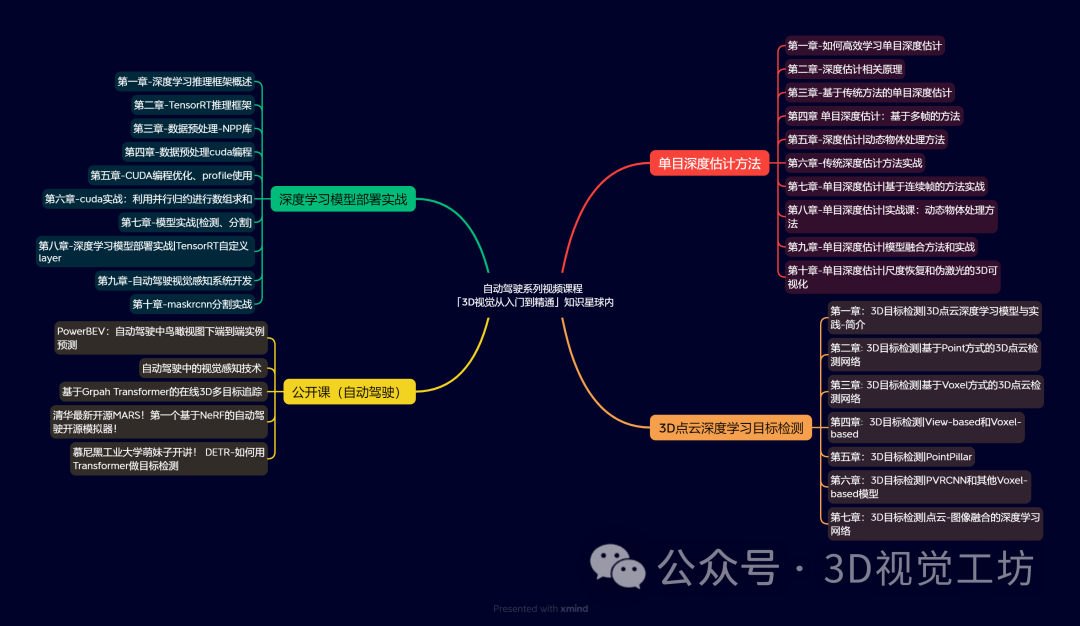
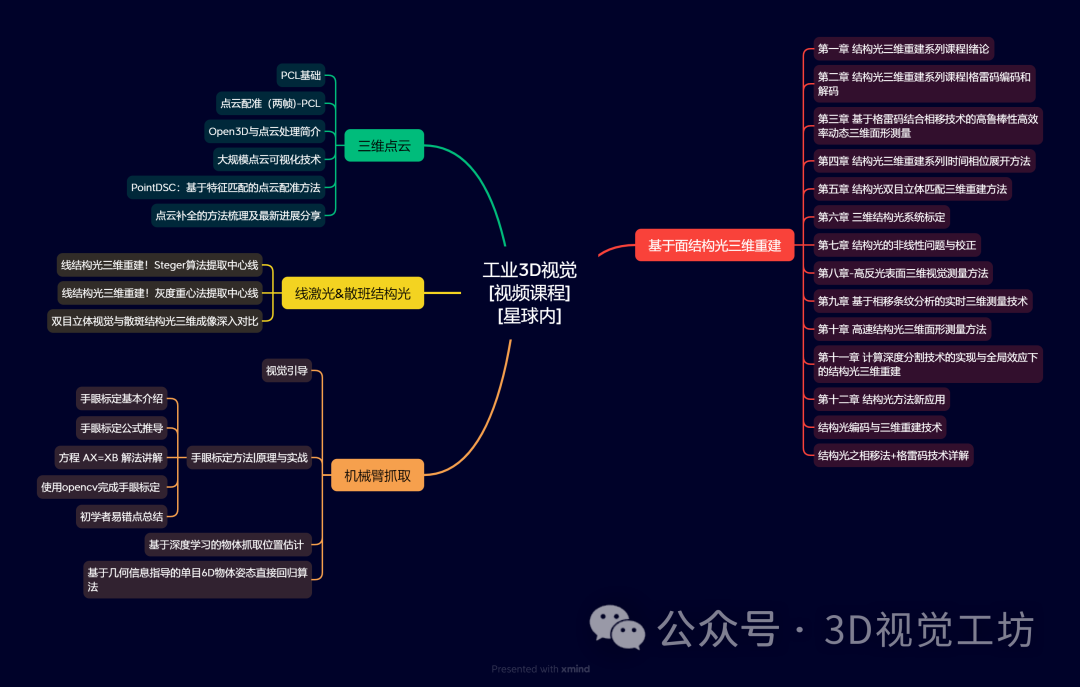
由于视频目录内容较多,这里简单展示上面三个课程的大纲,充分感受下星球的魅力。


星球内3D视觉各个方向公开课分享[视频+PPT]

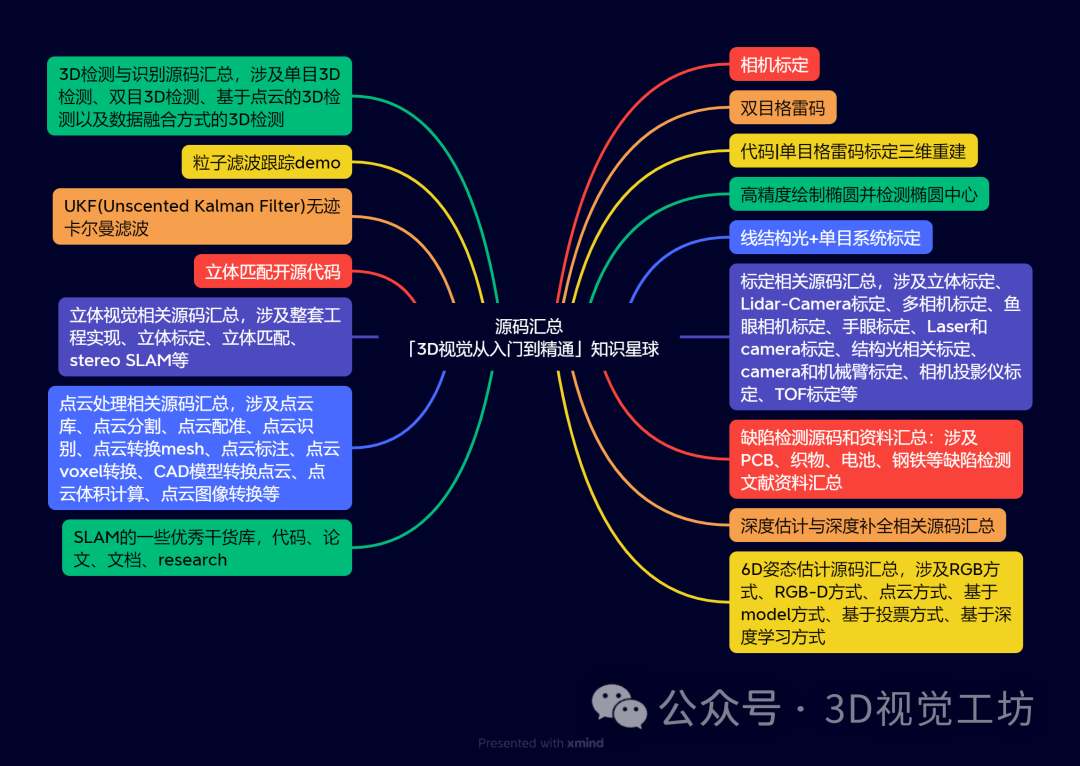
3D视觉各个方向源码总结
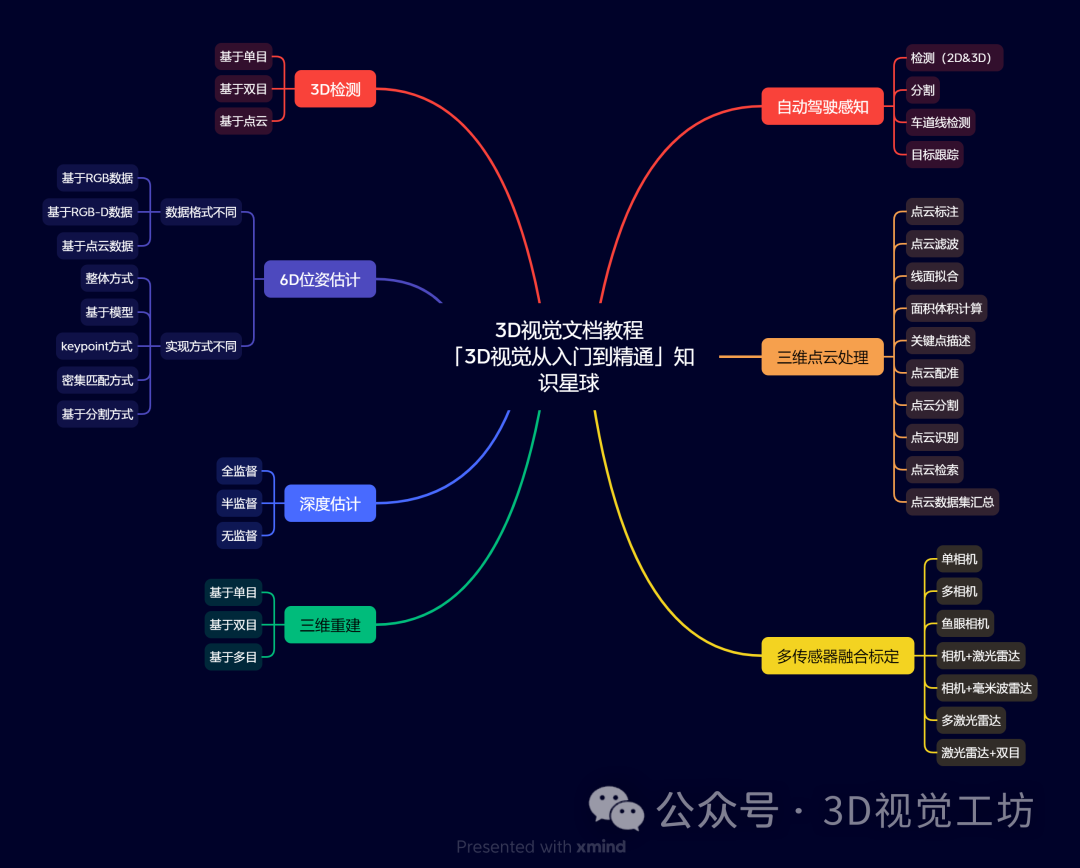
3D视觉各个方向学习路线总结
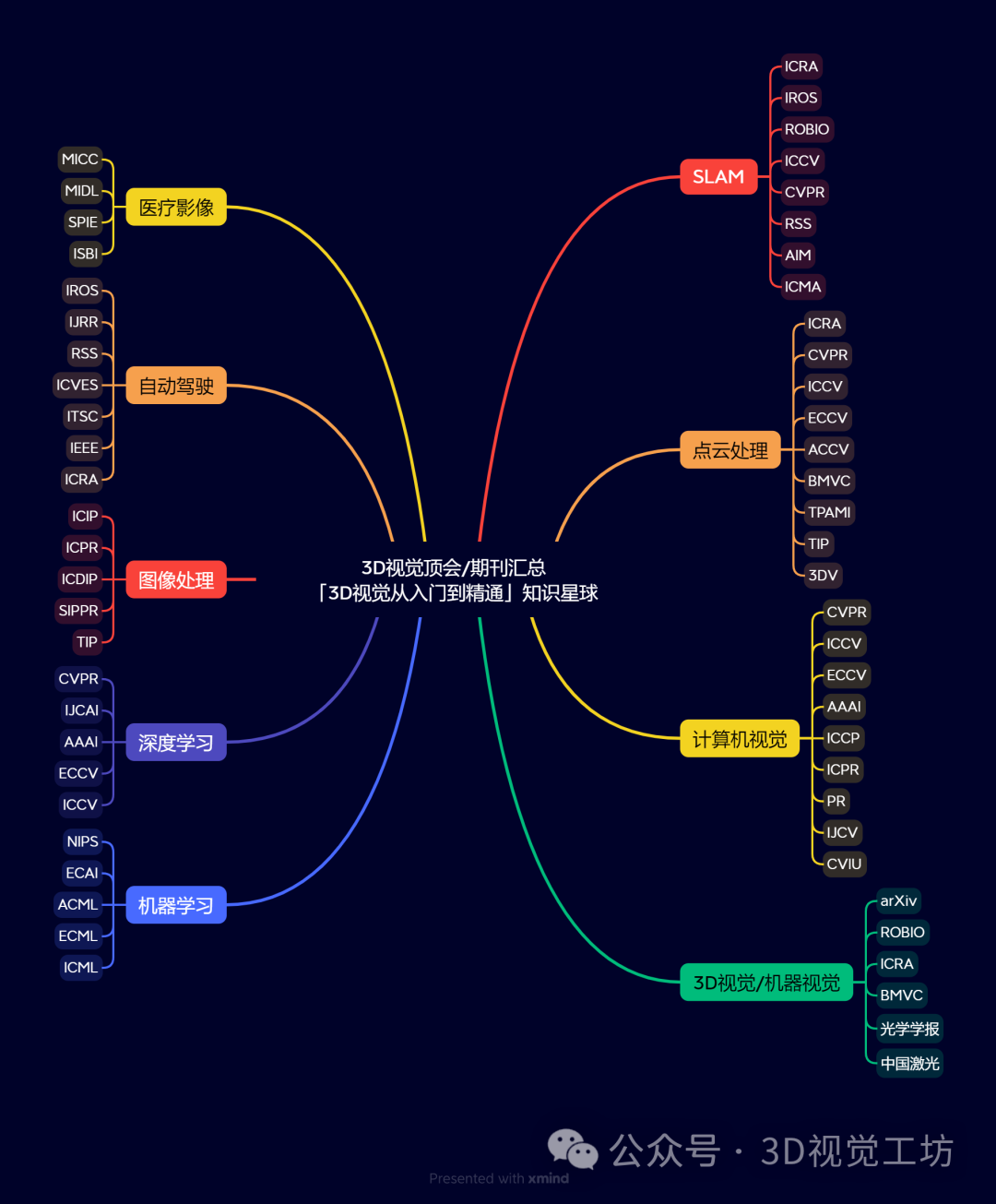
3D视觉顶会/期刊总结

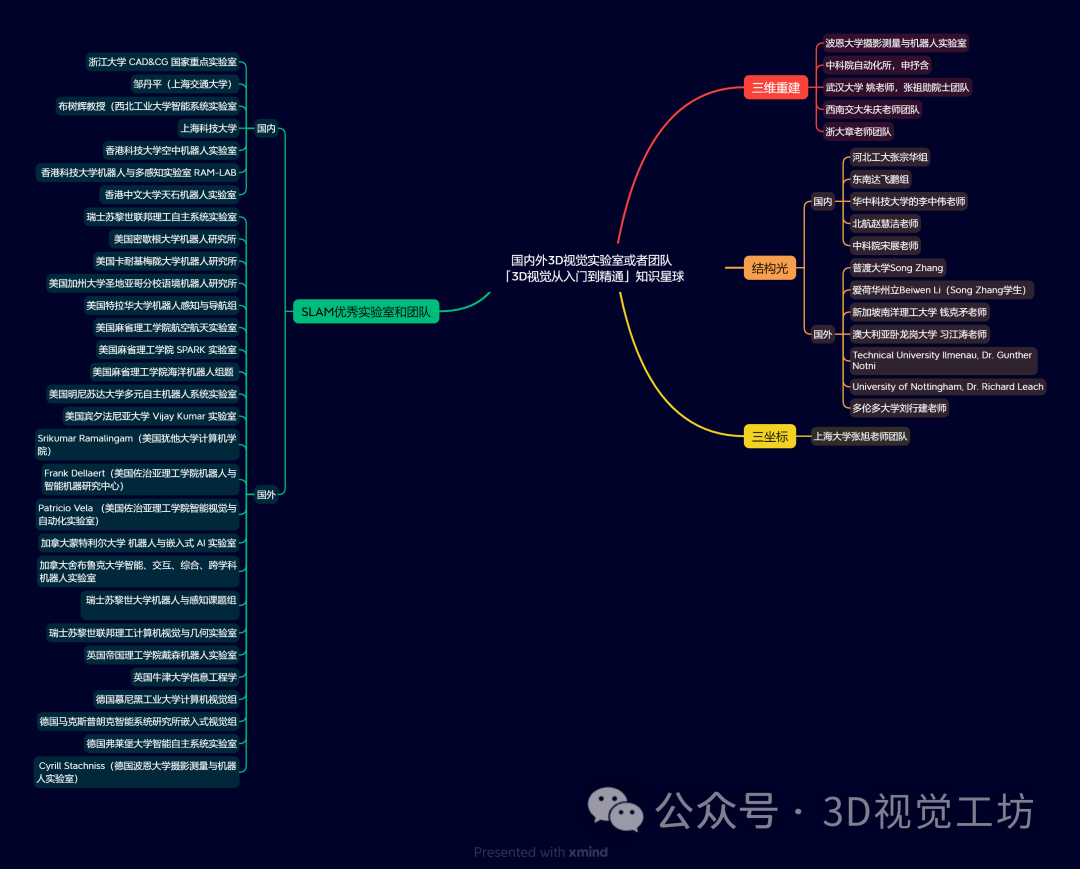
国内外3D视觉实验室或团队总结
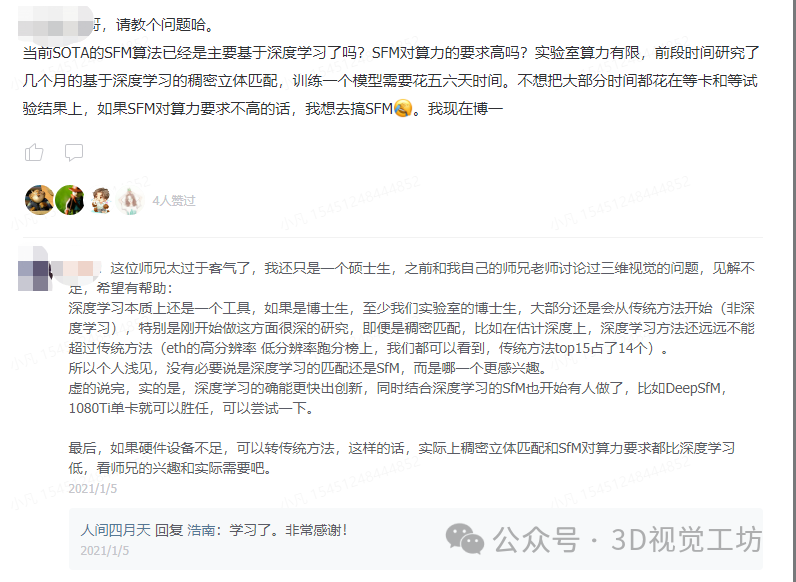
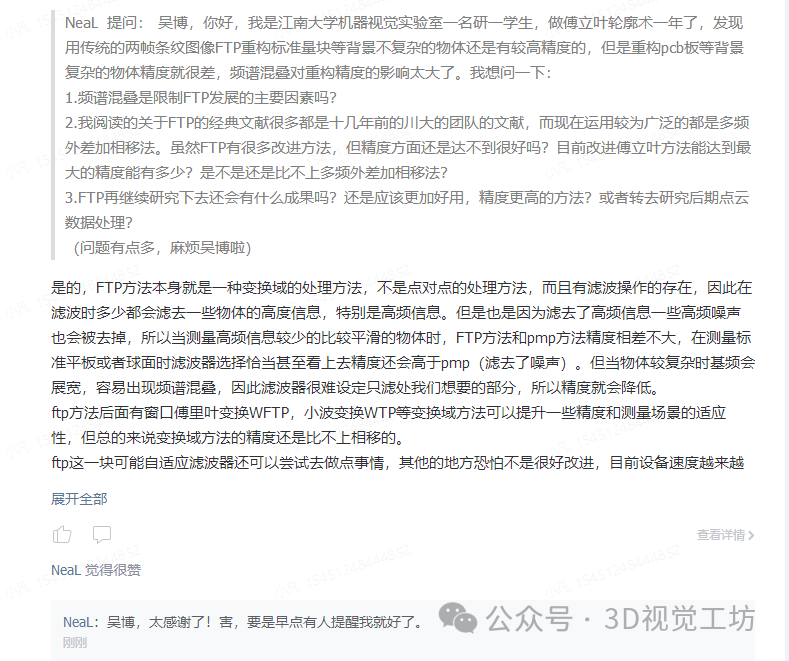
星球内问答示例



3D视觉项目资源优先对接
星球内经常会发布3D视觉行业项目,目前已经发布过的项目包括:
10W | 项目需求:履带小车使用大疆Mid360激光雷达做草莓大棚场景下的建图、路径自动控制
硕士毕业大论文(计算机专硕)
毕业论文辅导(深度学习的点云配准这块)
0.5W|毕业论文辅导|基于ROS的机器人自主导航的研究
5~8w|项目需求:Appen——深度摄像机成像软件技术服务
10~20万|基于移动平台的算法加速
8~15万|项目需求:开发7自由度机械臂高效、精准的控制器
毕业论文辅导(深度学习的点云配准这块)
硕士毕业大论文(计算机专硕)
5W~8W|项目需求:视觉三维重建
水电站自流洞巡检项目
个人便携式视觉惯性SLAM系统
真实LED屏幕箱体物理空间校准
光学镜片外观缺陷检测
人体三维动作重构
8万~10万|手机APP实现全景相机机外拼接合成图像
项目需求|室内场景三维重建项目
20K|项目需求:LED PCBA组装
仓库原始图片物体识别
基于穿戴式的Android系统的 SLAM功能开发
胳膊与手指的动态识别技术
针对点云立体重构的位姿测量技术
以上项目的联系方式,一般仅有星球成员才能获得,星球成员是最先知道项目信息的。
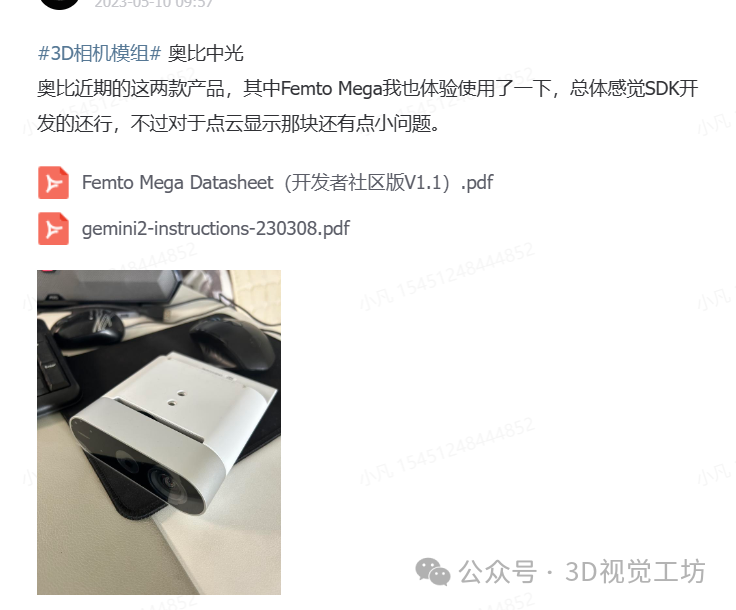
3D视觉行业最新传感器模组介绍
3D视觉行业最新传感器模组,星球内常常会第一时间分享,包括奥比中光的3D相机模组、先临三维的激光扫描仪、结构光相机、激光雷达、相机镜头等,这对项目中快速选型还是非常有利的。

星球成员评价
<<< 左右滑动见更多 >>>
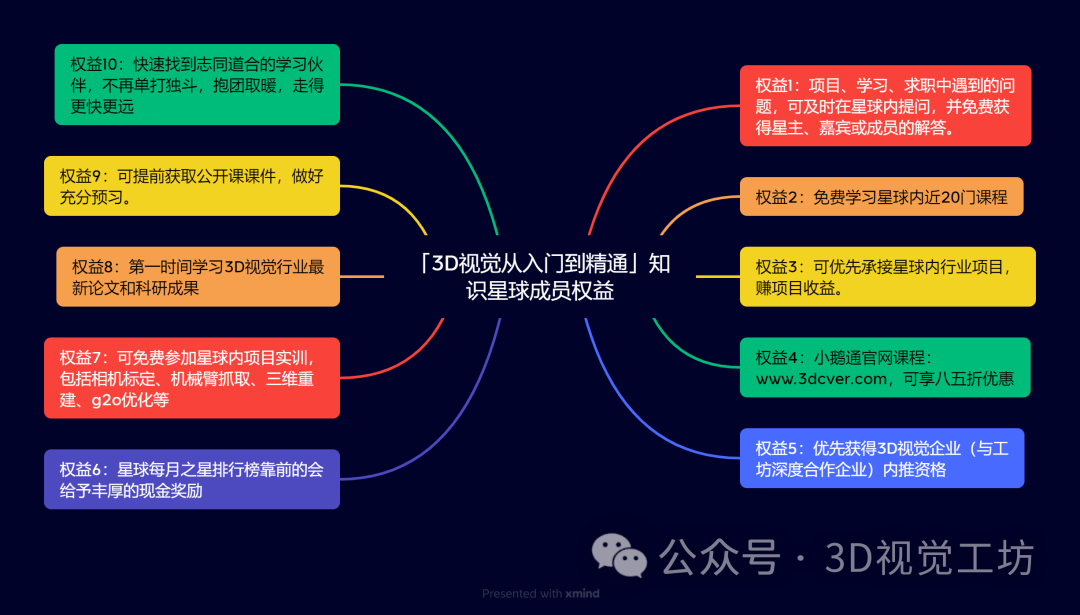
星球成员十大权益

说到这里,师妹忍不住打断了师兄。
师兄,这个星球也太牛了,我也要加入,这样后面学习中有问题,就可以向他们请教啦。
师兄赶忙拦住师妹:
这个星球今天有活动,可以给你省两杯奶茶钱。近期星球里新增了好几门课程,我们可以一起学习啦。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









