






 Sora的最新视频展示了前所未有的多视角和新功能,引发了网友对是否使用3D引擎如虚幻引擎的猜测。AI生成的视频质量提升引发关于训练数据来源和生成方法的深入讨论,暗示可能结合了3D引擎和AI技术以实现高保真度。
Sora的最新视频展示了前所未有的多视角和新功能,引发了网友对是否使用3D引擎如虚幻引擎的猜测。AI生成的视频质量提升引发关于训练数据来源和生成方法的深入讨论,暗示可能结合了3D引擎和AI技术以实现高保真度。
点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
白交 衡宇 发自 凹非寺
量子位 | 公众号 QbitAI
好消息,好消息,真·Sora视频上新了!走过路过不要错过!
(不用苦苦等候,或撑大眼睛费劲吧啦鉴别真假Sora产品了)。

就在过去短短几个小时里,包括Bill Peebles、Tim Brooks两位负责人在内的工作人员唰唰唰N连发。

(好了好了,知道你们是好朋友)
不仅有前所未的多视角、新功能展现,最重要的是,各个视频的呈现效果依然处于令人惊叹的段位。
比如Go Pro视角下潜水去探索沉船。
比如下面这段视频,效果跟此前写实、逼真的画风有点不一样。
而且Sora产出的是同一片段的不同视角画面。
它的提示词是:精心制作的立体模型,描绘了日本江户时代的宁静场景。传统的木结构建筑。一个孤独的武士,穿着复杂的盔甲,缓慢地穿过城镇。
另外比较惊艳的还有一头大眼睛、长睫毛、口喷冷气的小白龙,就是下面这位:
有人尝试用同样的prompt在DALLE·3上画画,得到的结果是这样的:

就,还挺神似!
但Sora小白龙的效果让某种声音越来越大,那就是:
好家伙,我一眼就看出这玩意儿有虚幻引擎的影子!
不过,这波视频还是惹得网友们wow wow的,不停惊叹,怎么Sora每波视频效果都越来越好了?
我的天爷啊,等Sora公测开放等得大家一天只能吃下三顿饭了!
有的网友超级激动,已经在知名新产品挖掘平台ProductHunt上给Sora的API站好了坑。
万事俱备,只欠东风。
官方新视频再流出
首先来看看Sora这波上新,此次最惊艳的是由玻璃制成的乌龟,日落时分在沙滩上爬行。
不过也有细心的网友发现:“我只看到了三条腿…”“前面两条腿更像乌龟的脚蹼”


而在Midjourney上使用相同的提示,效果是这样的。

另外,多个视角展现也成为了此次上新的亮点。
比如在夏威夷玩跳伞。
提示词:a man BASE jumping over tropical hawaii waters. His pet macaw flies alongside him(一名男子在夏威夷热带海域进行低空跳伞,他的宠物金刚鹦鹉与他并肩飞翔)
甚至还有F1赛车手的视角。
此外,Sora还暴露了一些类似剪辑的新功能——无缝衔接。
此前看到,它能通过文本、图像或视频输入对模型进行提示。
如今发现,它还可以在两个输入视频之间逐渐进行插值。两个毫不相干的Sora视频,结果无缝过渡成了新视频。
咳咳,不过水下为啥会有蝴蝶??
任意尺寸比例生成,此次新视频也得到了展现。
不过由于悉数都是Sora团队成员发布的视频,有网友觉得,除非有个非OpenAI工作人员才测试,不然Sora就是个vaporware(雾件)
这些案例中,也有被认为翻车的……
提示词:a dark neon rainforest aglow with fantastical fauna and animals(黑暗的霓虹雨林,闪烁着奇幻的动物和动物的光芒)
网友表示:为什么会是矢量动画的风格,提示中根本并没有这样的提示。
这是我见过Sora最糟糕的例子
“我不是专家,但这绝对用了UE5”
与此同时,关于Sora所生成视频的讨论重心,逐渐从“这不符合物理世界的规律”,转移到更深层次——
关于其背后训练数据来源的讨论。
现在的民间主流说法(doge)是:
这绝对用了3D引擎/UE5来训练的!

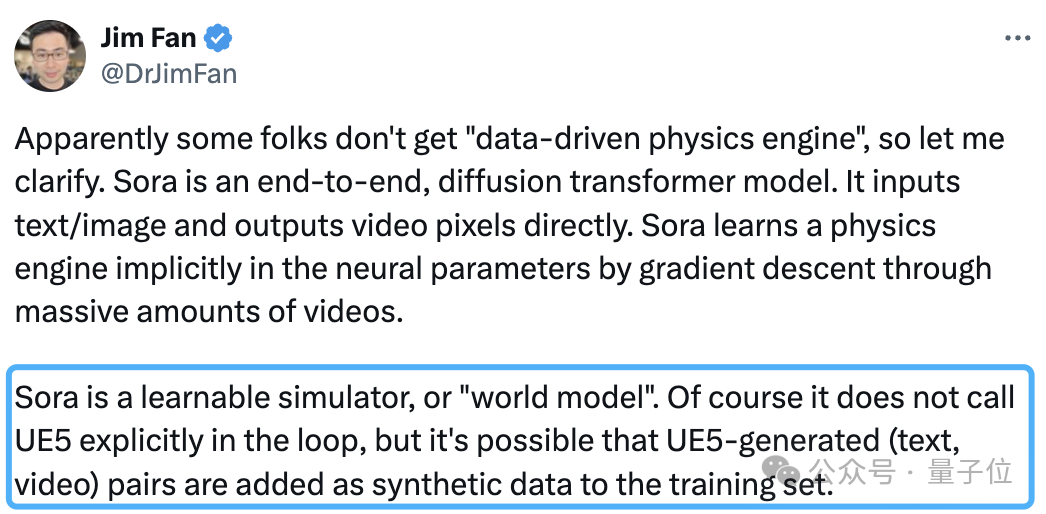
英伟达科学家、大家伙熟悉的老盆友Jim Fan老师就在首日猜测过,称Sora虽然没有明确表示调用了UE5,但极有可能把用UE5生成的文本、视频当作合成数据,添加到自个儿的训练集中。
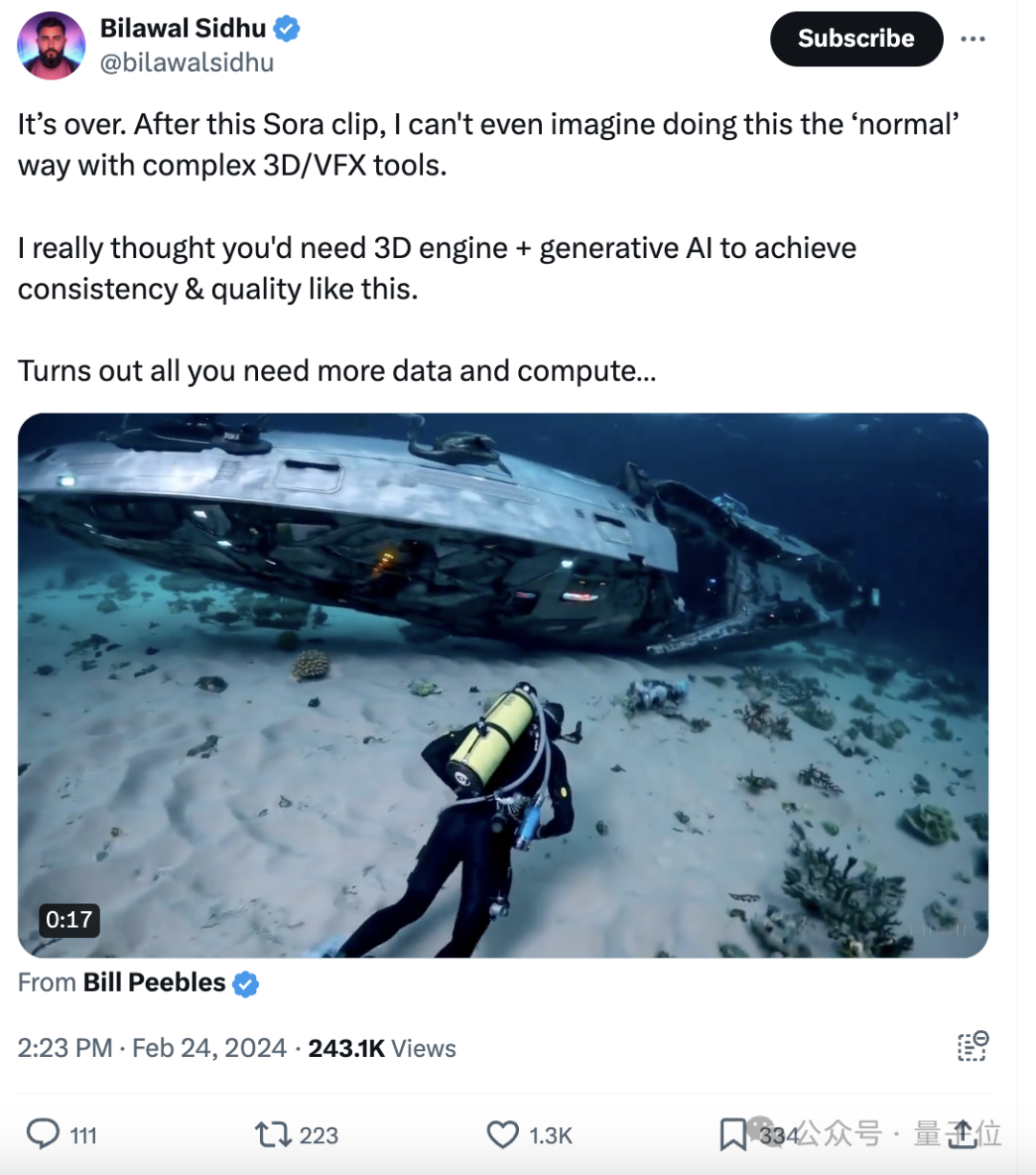
也有一位前谷歌工作人员对Sora这次的新视频进行了在线锐评:
Sora这效果,我真的认为需要3D引擎+生成式AI结合,才能实现这样的一致性和视频质量。
事实证明,就是得要更多的数据和计算……
倒不是Jim Fan等人的一家之言。早在第一波Sora视频亮相时,这种声音就第一时间起来了,声量还很不小。
再多举个 。
。
一位从事数据科学和ML的推友罗列出了自己站队这种观点的“证据”。
他亮出的牌是漫步樱花街头的那段视频。
然后配文道:“视频中移动的人似乎与UE5演示中的人类的移动方式非常相似。现实中的人走路逛街,并不会老用一个恒定的速度。”

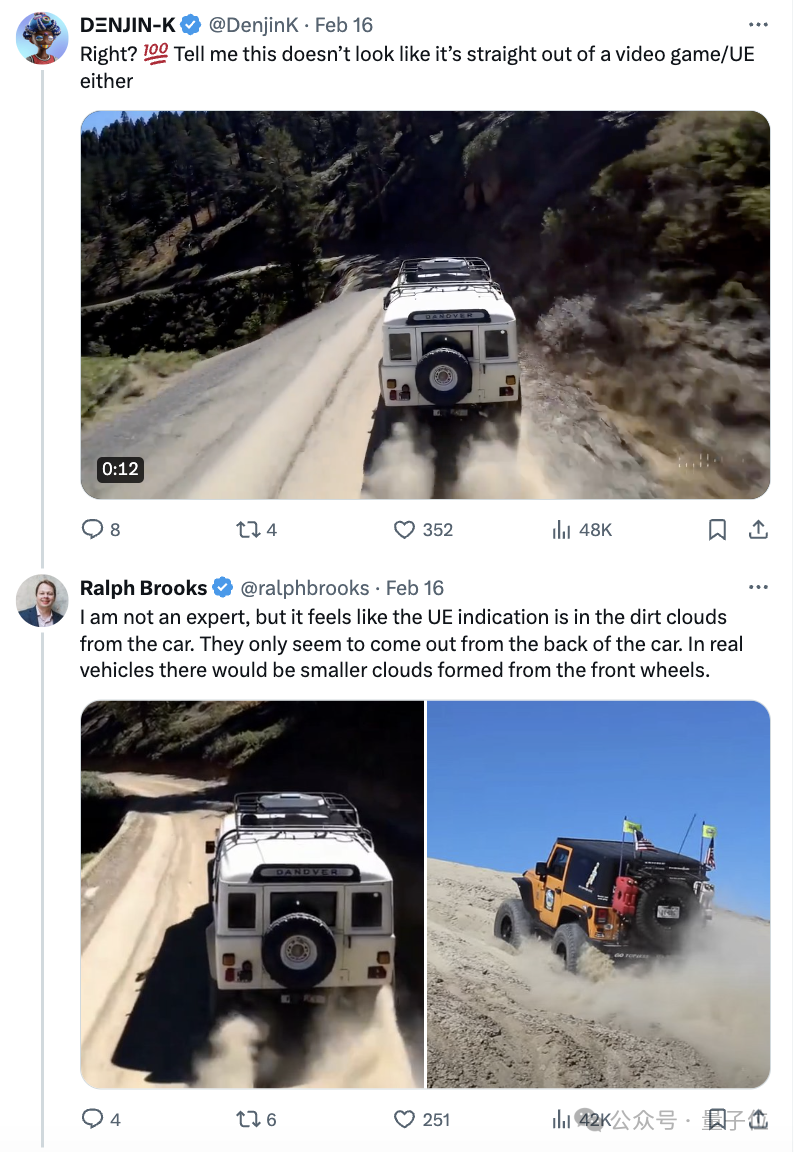
也有人质疑这种说法,毕竟Youtube等互联网上拥有数十亿(可能还不止)小时的视频片段,干啥要用虚幻引擎来增加工作量呢?
于是就有人把“汽车行驶”的视频片段丢到上面这位推友小哥面前,说这看起来也不像是用了3D引擎搞的呀!
小哥友好地嘚吧嘚嘚吧嘚,开始了自己的分析:
“我不是专家……但感觉UE让汽车行驶掀起的尘土,只在后轮部分有。但其实现实情况中,前轮部分也会扬起尘沙。”
当然也有不少人赞同他,附和道:
虽然不一定用的是UE5吧……但事实确实是,用数字孪生模拟可能效果和效率都更好。
而且这样还能用较少的IRL数据进行更高质量的数据采样。
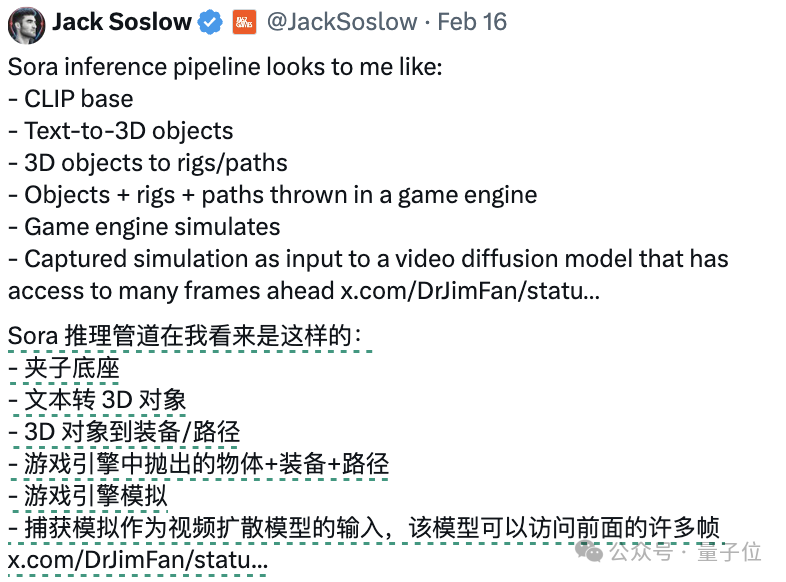
以及还有人把自己理解中Sora的pipeline都列到推特上了。
这种讨论大规模流传开后,不少人对Sora可能是“UE5+AIGC”产生的效果嗤之以鼻。
“哼 !我话放在这儿,合成数据是视觉机器学习的作弊代码!!”
!我话放在这儿,合成数据是视觉机器学习的作弊代码!!”
同时有人从这种讨论中看到了不久之后的一种可能性。
即未来的生成不是通过模拟真实物理来呈现,而是通过训练模拟物理模拟(即现实世界)的模型来呈现。
嗯……咱就是说,谁能一口否定没有这种可能呢?
One More Thing
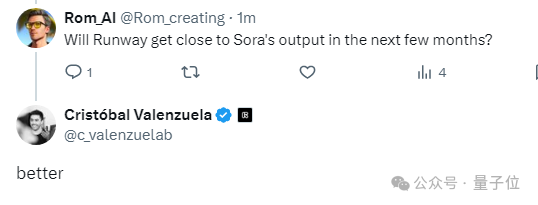
Sora上新视频后,有网友急冲冲去问了另一家AI视频生成头部玩家Runway的首席执行官。
“最近几个月,有发布新版本的打算吗?就是质量接近Sora的那种~”
Runway CEO冷冷回了一个词儿:
better
参考链接:
[1]https://twitter.com/minchoi/status/1761367515777695965
下载
在公众号「3D视觉工坊」后台,回复「 3dcv」,即可获取工业3D视觉、SLAM、自动驾驶、三维重建、事件相机、无人机等近千余篇最新顶会论文;巴塞罗那自治大学和慕尼黑工业大学3D视觉和视觉导航精品课件;相机标定、结构光、三维重建、SLAM,深度估计、模型部署、3D目标检测等学习资料。
3D视觉方向交流群成立啦
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
[SLAM]视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理:dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。




— 完 —
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
3D视觉科技前沿进展日日相见 ~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









