






咱们第二期的3DGS技术研讨会今晚在李博的主持下,顺利拉开了帷幕。接下来,我们的3DGS研讨会将重点以星球内直播的形式展开,视频也将分享在星球内。
这里给大家赠送一张优惠券!新用户立减60元,老用户7折基础上再减30元。
微信扫码加入,最后一天福利

如何系统的学习3D视觉算法,3D高斯等,面对面和领域内的专家交流,在这里推荐我们一直在更新的3D视觉学习社区:3D视觉从入门到精通知识星球,也是国内成立较早,涉及方向最多的3D视觉学习社区。


「3D视觉从入门到精通」知识星球16大亮点
| 国内较早成立的3D学习社区 | 国内涉及方向最多的3D学习社区 |
|---|---|
| 近20+门星球内部学习视频 | 大量3D视觉优质源码 |
| 3D视觉各个方向自研精华问答 | 近百位算法专家成员 |
| 最前沿顶会论文一作讲解 | 大量高质量项目对接 |
| 优质书籍干货分享 | 3D高斯系列教程 |
| 专业的问题解答团队 | 海量的3D视觉行业招聘信息&面经 |
| 不定期举行内部学术交流活动 | 探讨科研工作难题 |
| 和行业一起交流最新领域进展 | 吐槽学习工作生活等等 |
星球关注方向
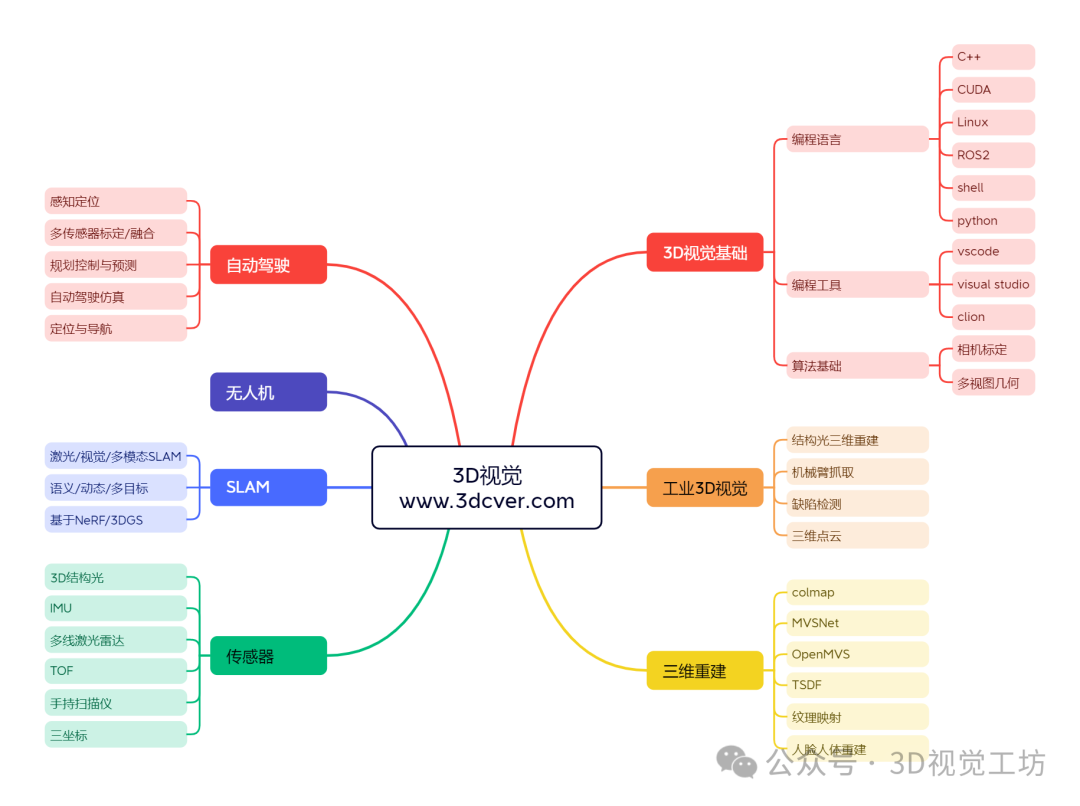
星球主要关注方向,包括但不限于:
星球主要内容
3D视觉从入门到精通知识星球是国内较早成立的3D视觉交流社区,成立于2018年3月份,涵盖了工业3D视觉、自动驾驶、三维重建、SLAM、无人机等多个子方向,凝聚力无数人学习资源!3D视觉从入门到精通知识星球建立的初衷——帮助真心想进步的同学找到3D视觉的学习方向、学习路线、解决学习/求职/职场中遇到的问题。

支持APP、网页端和小程序,可随时随地使用。每天花几分钟阅读一圈,就能收获学习的动力与知识
星球内部的原创资源非常丰富,涉及工业3D视觉、slam、自动驾驶、三维重建、无人机等等多个子方向,主要内容包括但不限于:
3D视觉源码汇总
3D视觉基础视频
工业3D视觉系列视频
三维重建系列视频
SLAM系列视频视频
自动驾驶系列视频
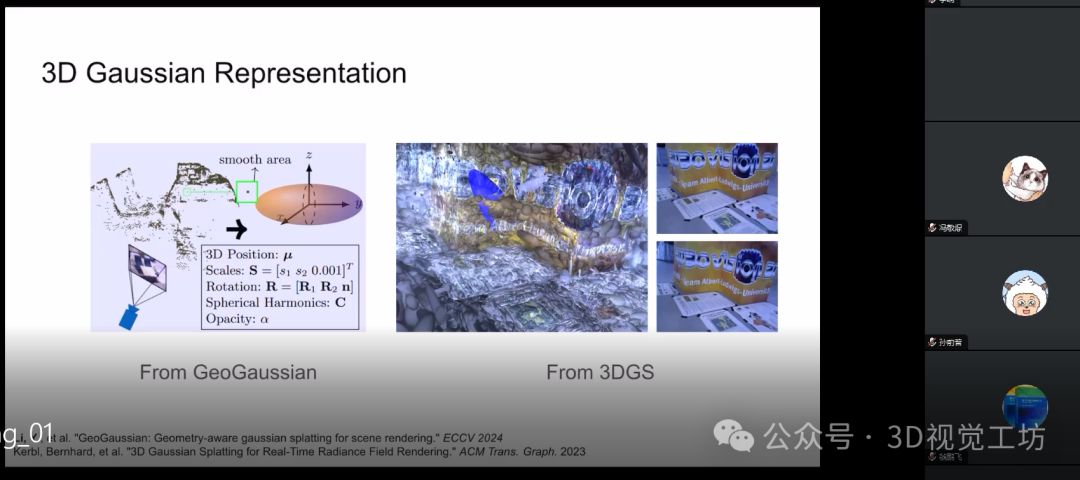
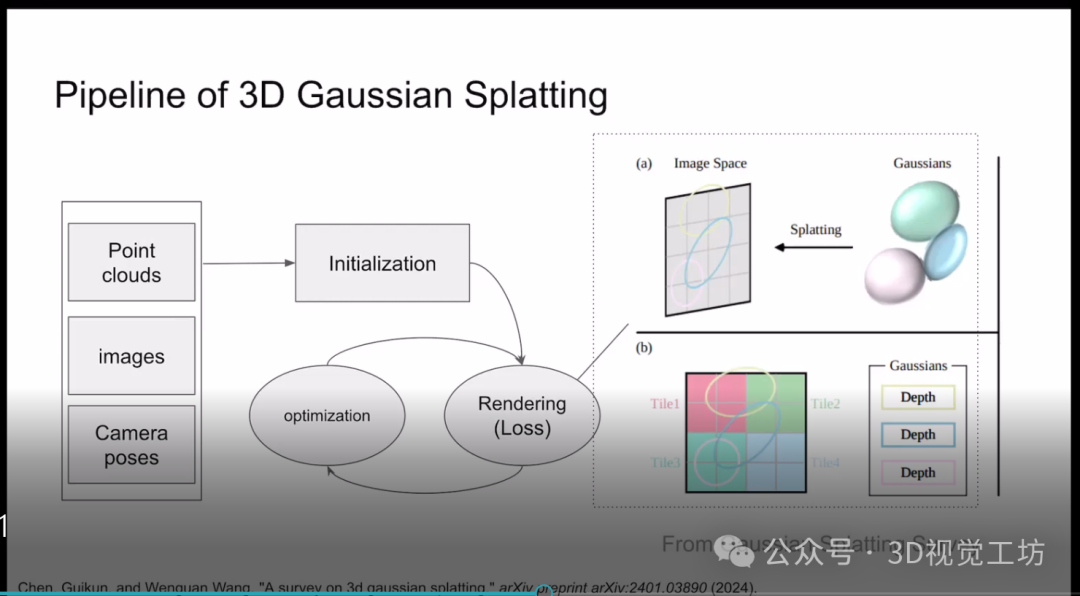
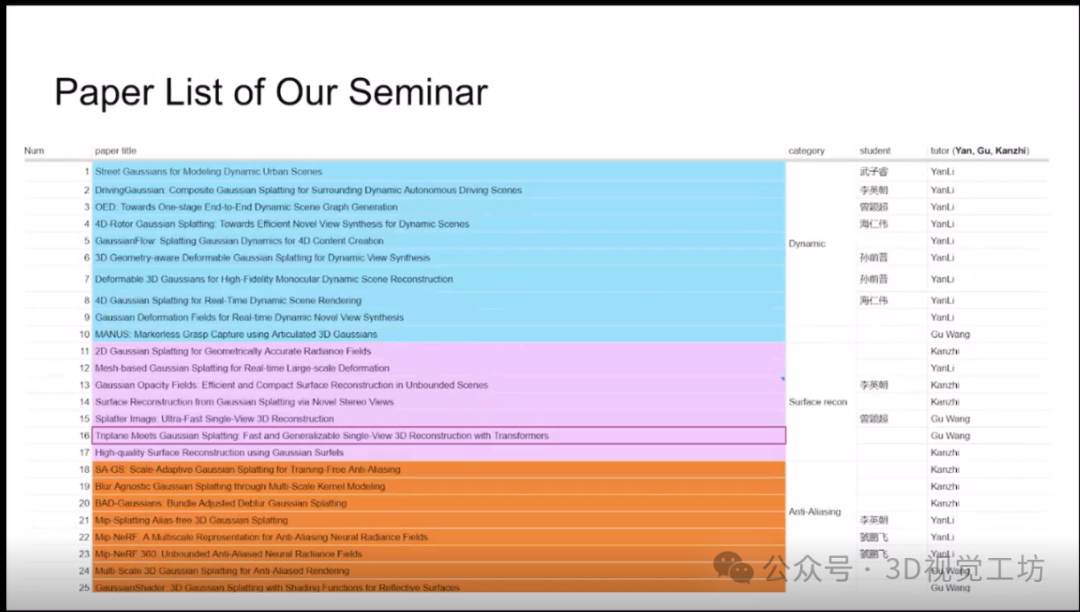
3D高斯系列论文
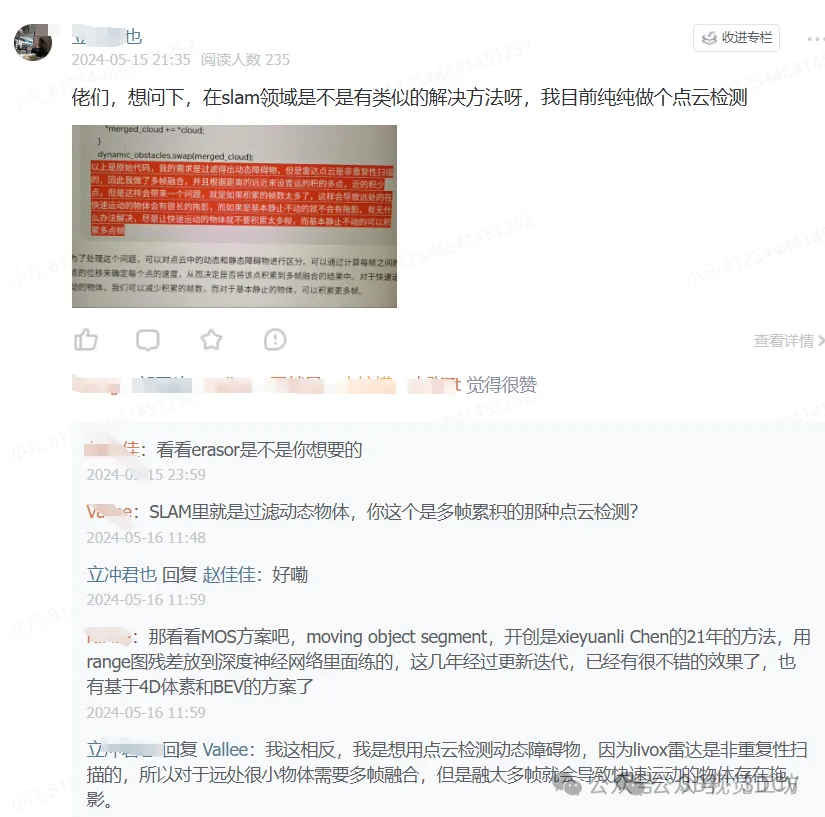
3D视觉方向自研精华问答
星球项目对接
最前沿顶会论文一作讲解
3D视觉顶会期刊汇总
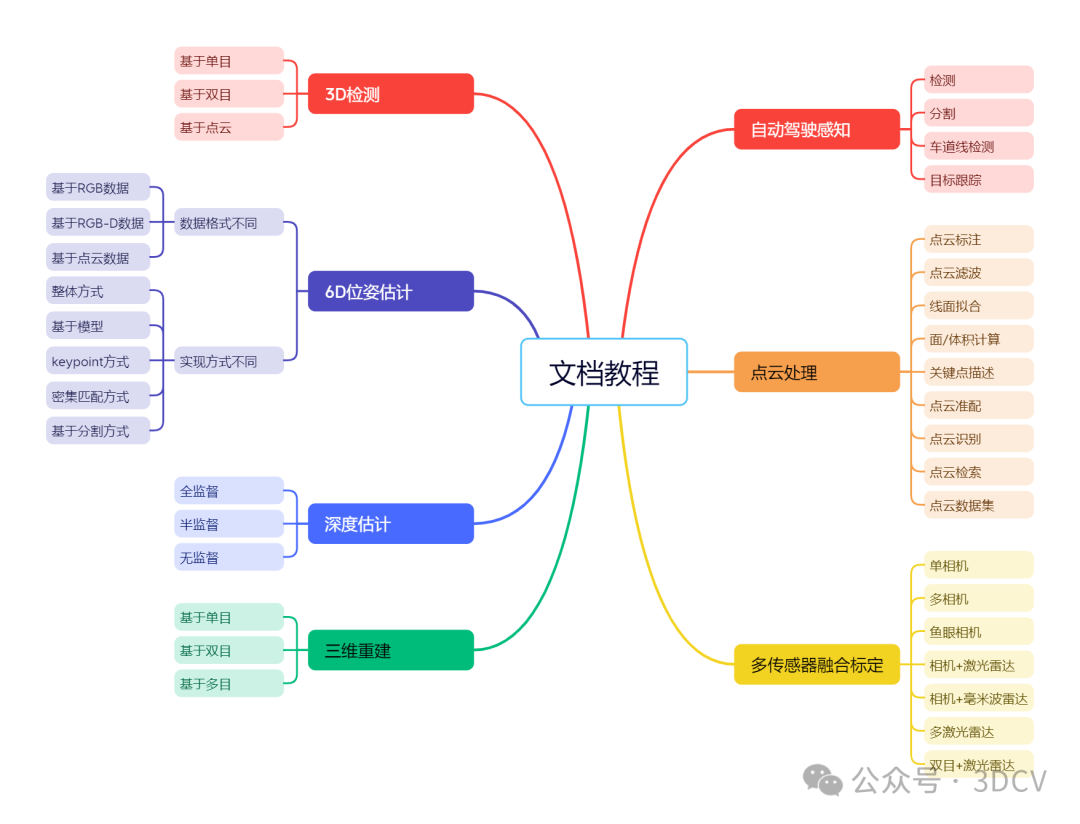
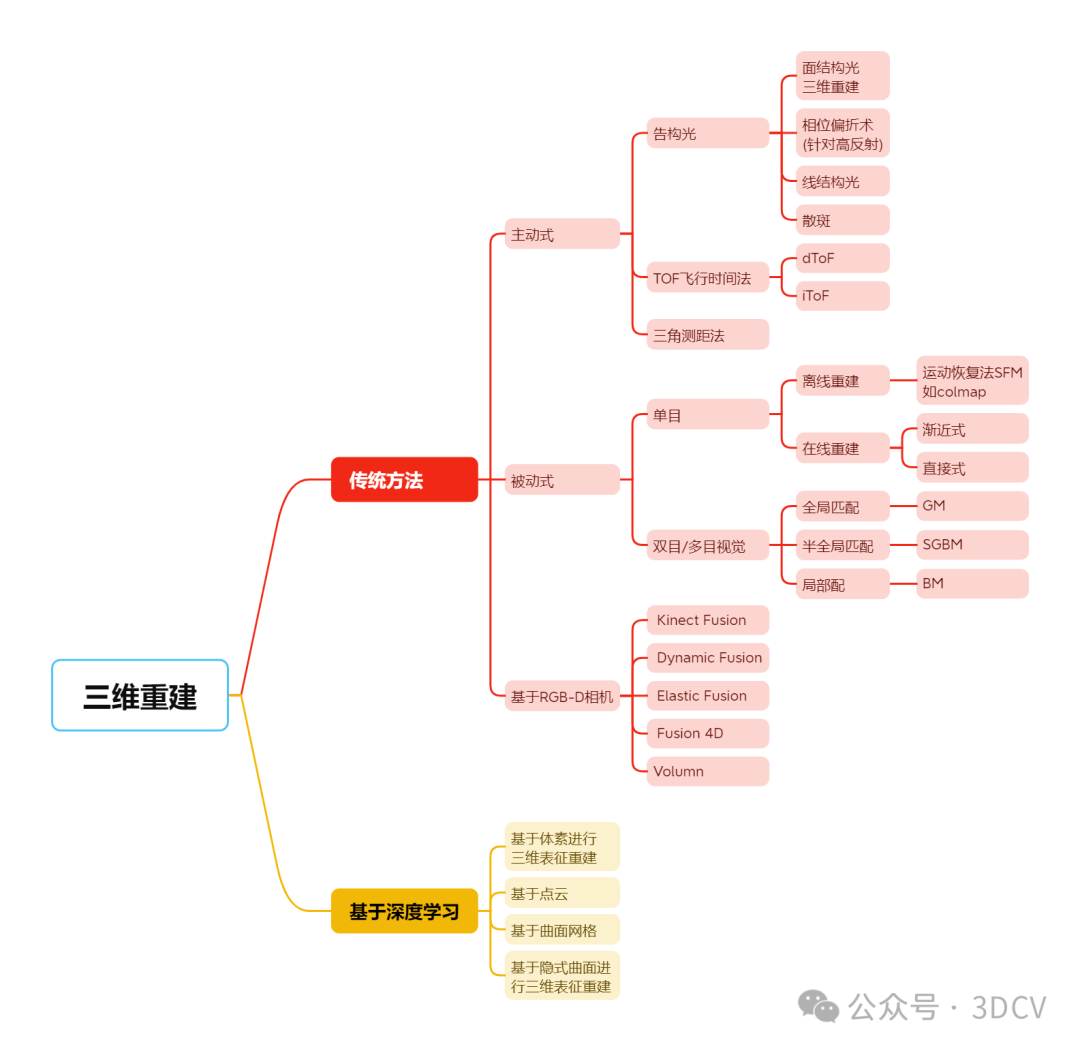
若干类别文档教程
星球3D视觉行业最新模组
优质书籍干货分享
最新顶会论文&代码
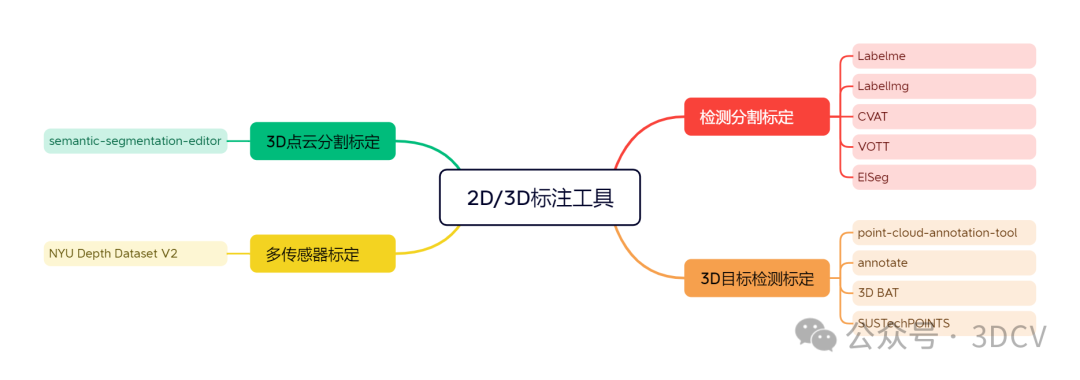
计算机视觉2D/3D标注工具汇总
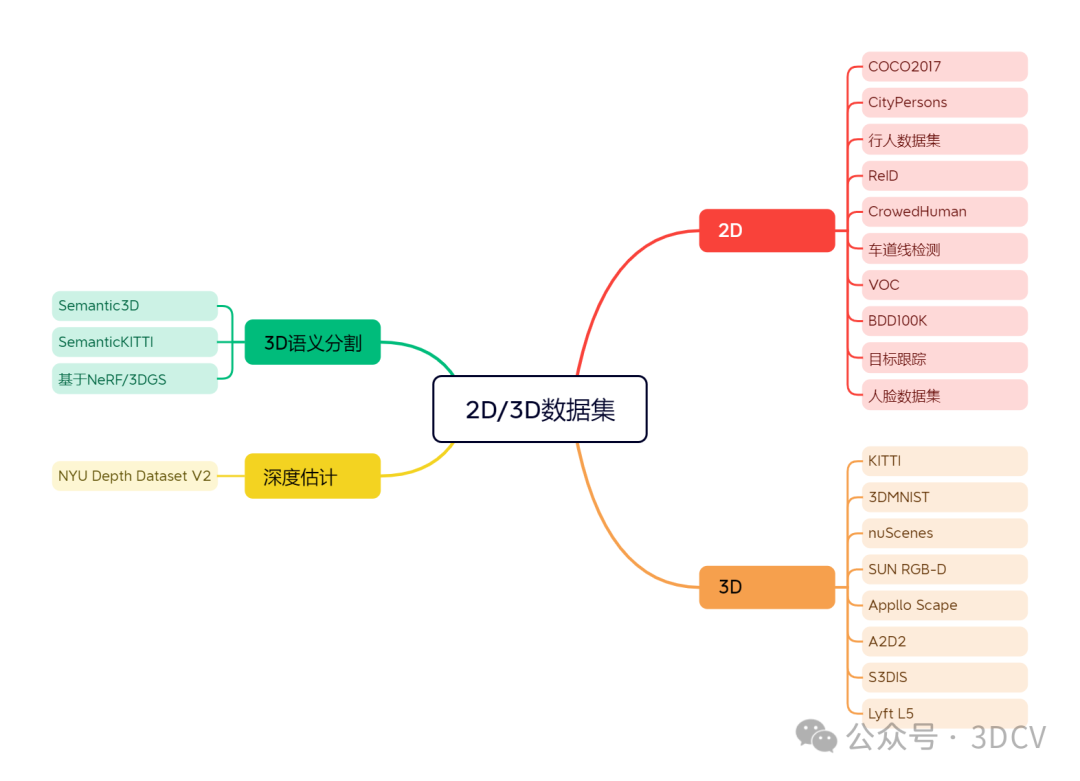
2D/3D数据集汇总
星球专属福利
专业的问题解答团队
…………
3D视觉源码汇总
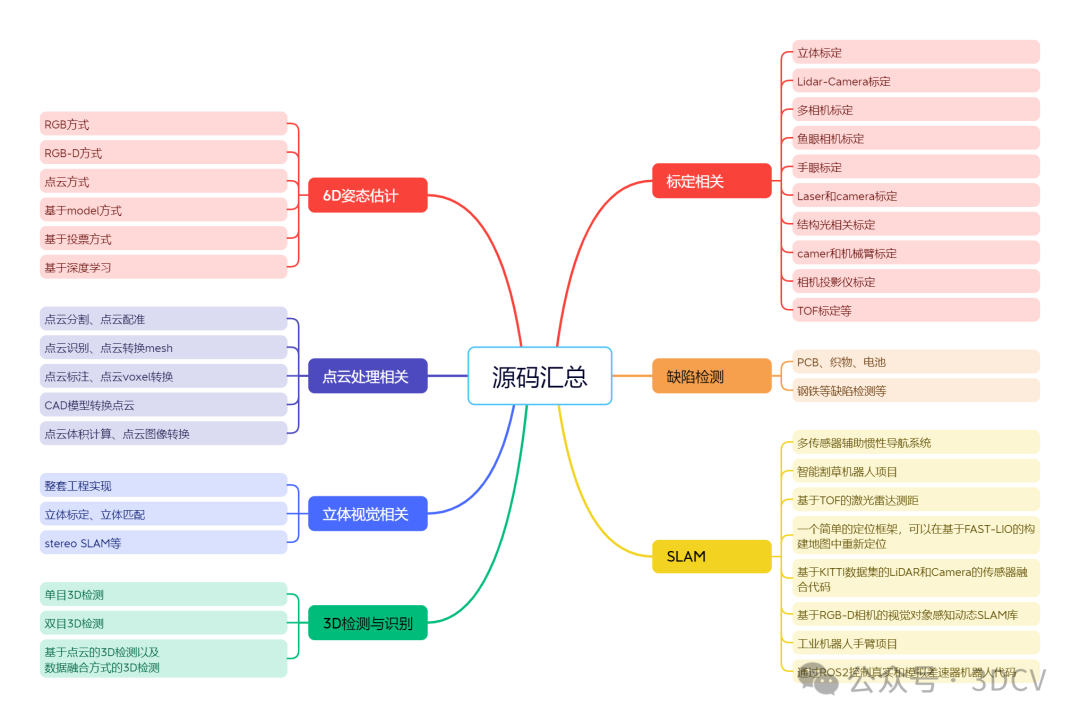
注:星球内部优质源码包括但不限于以上,持续更新!
星球内部自研了近20+门系统原创教学视频,加入星球在专栏中可随时随地学习,包括但不限于:工业3D视觉、自动驾驶、三维重建、SLAM、3D高斯、无人机等多个子方向,详细内容如下:
3D视觉基础视频教程
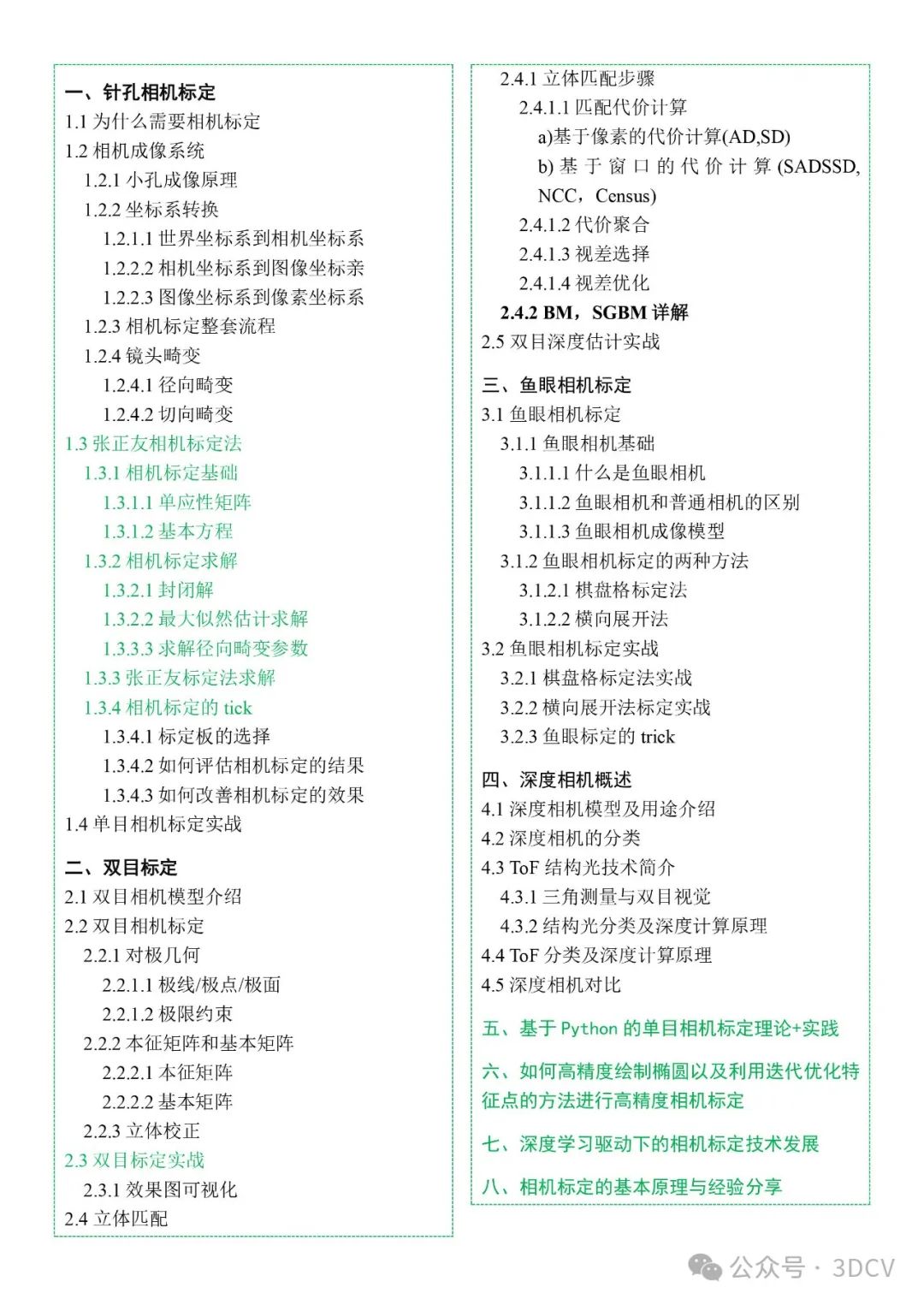
高精度相机标定从理论到实战系统教程
本课程主要包含两部分,分别是相机标定和3D视觉,相机标定包含单目,双目,以及鱼眼相机标定,3D视觉包含立体视觉,结构光和TOF,以立体视觉为主。课程提供对应数据与代码。
课程亮点:除了相机标定的基础原理和代码之外,星球里还补充了高精度相机标定的改进方法以及实战技巧,这是相当硬核的。
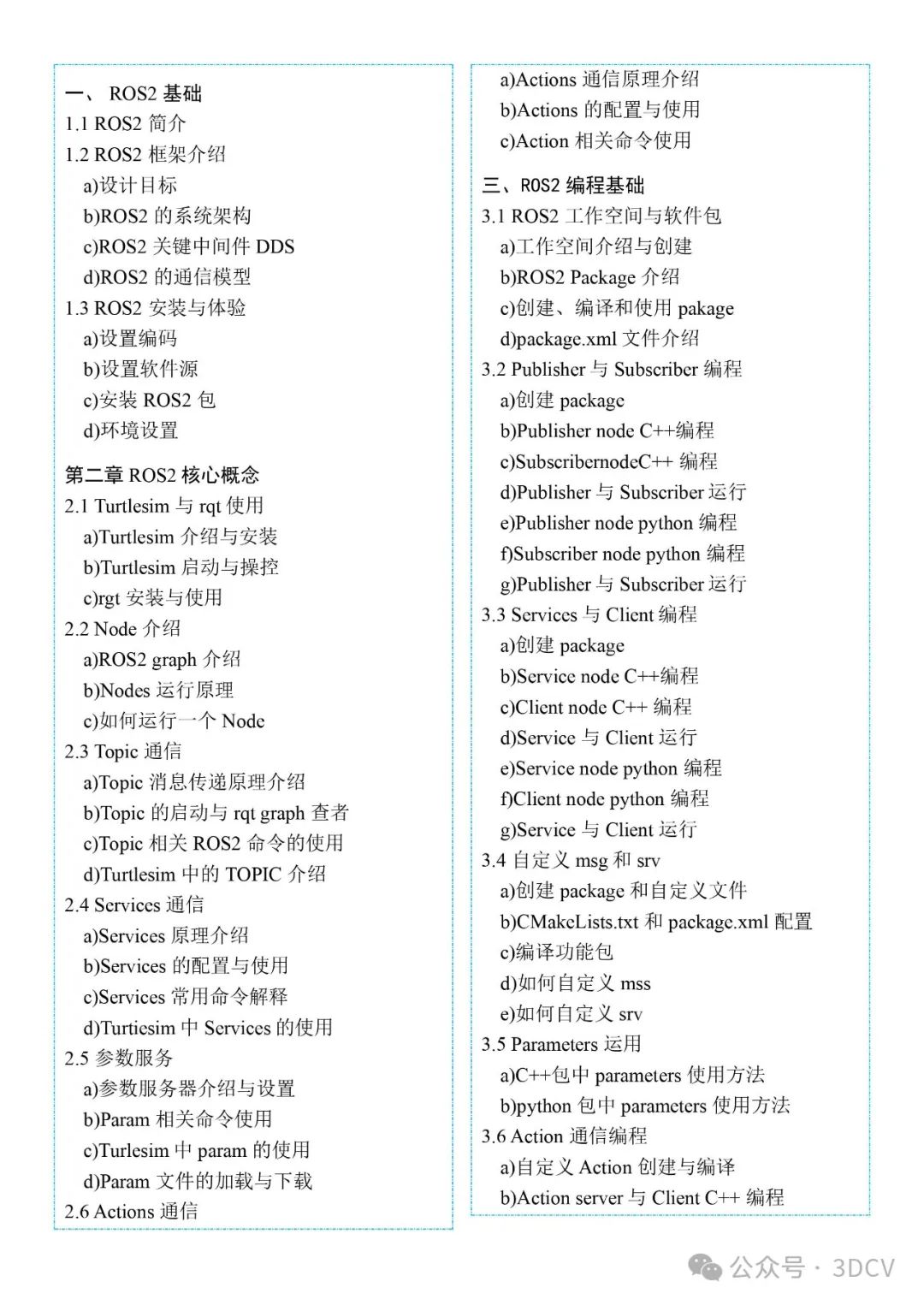
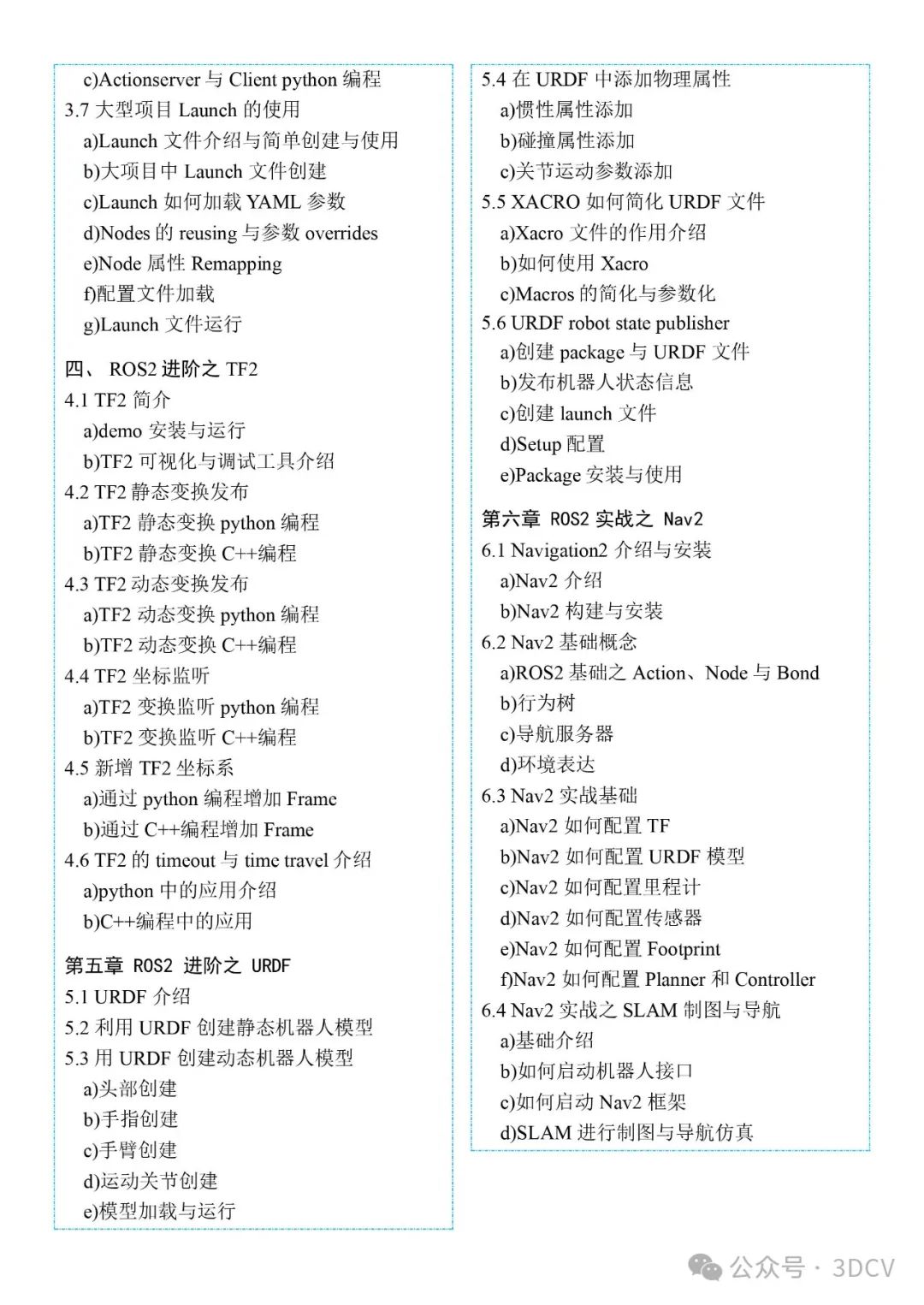
ROS2 从入门到实战视频教程
ROS2从入门到实战视频教程,从小白方式介绍到高阶使用讲解,对ROS2进行全面的实操教学训练,为大家提供系统性的学习机会。
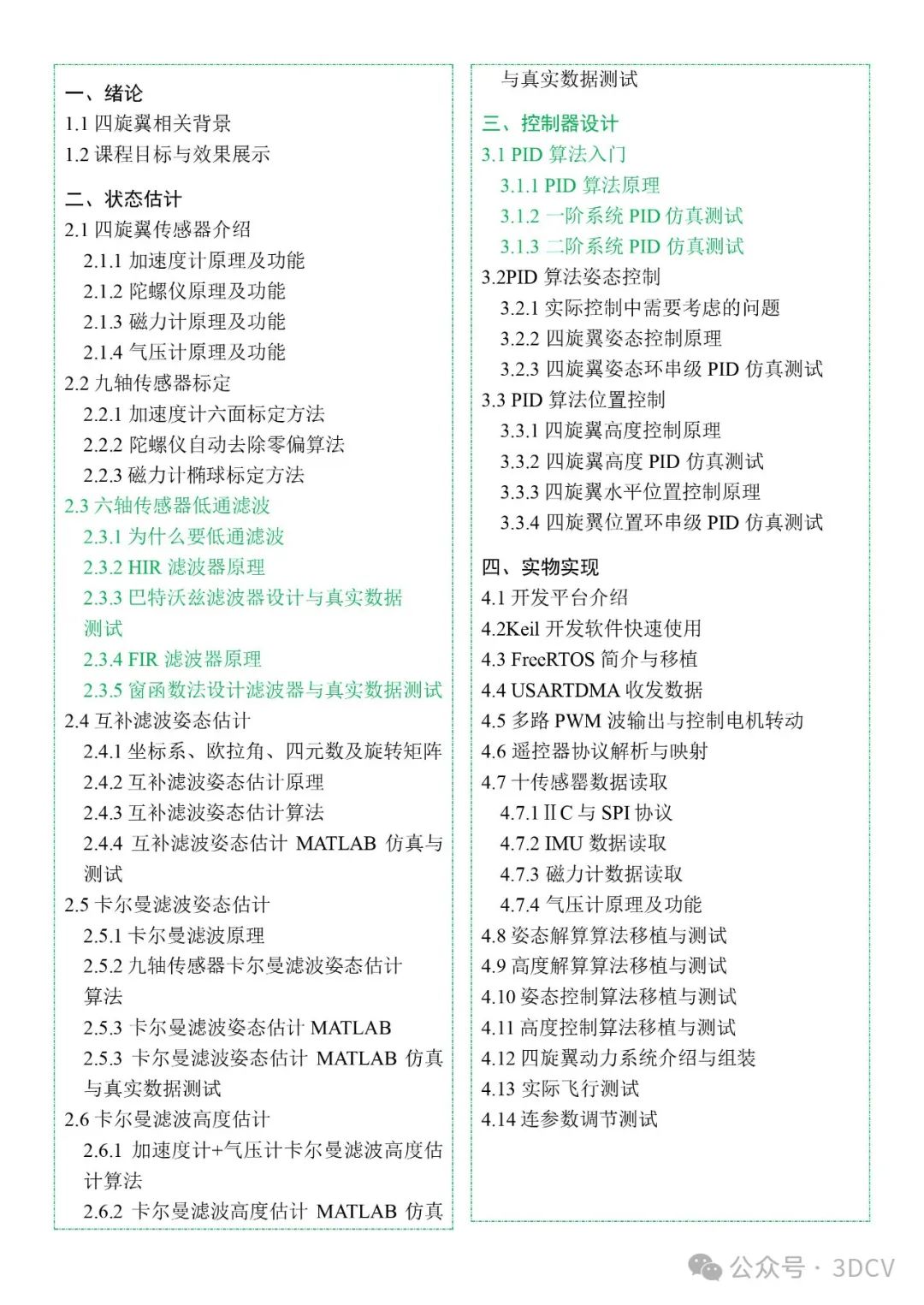
四旋翼飞行器:算法与实战
工业3D视觉系列视频
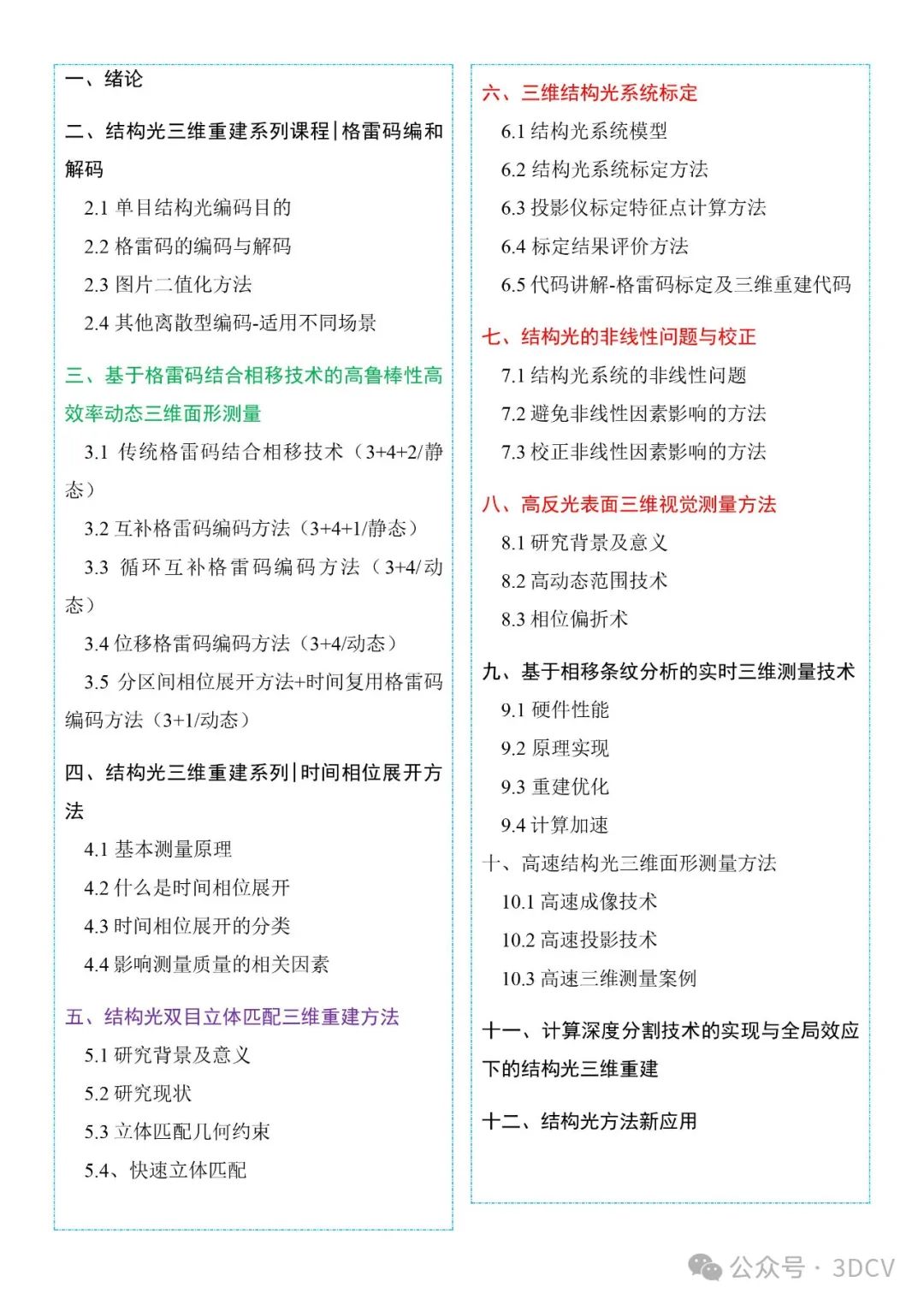
基于面结构光三维重建系列视频(6位博士+资深算法工程师主讲)
主讲老师团队包括:吴周杰博士、邓博、书涵、张琼仪、杨洋博士、郭文博博士等。

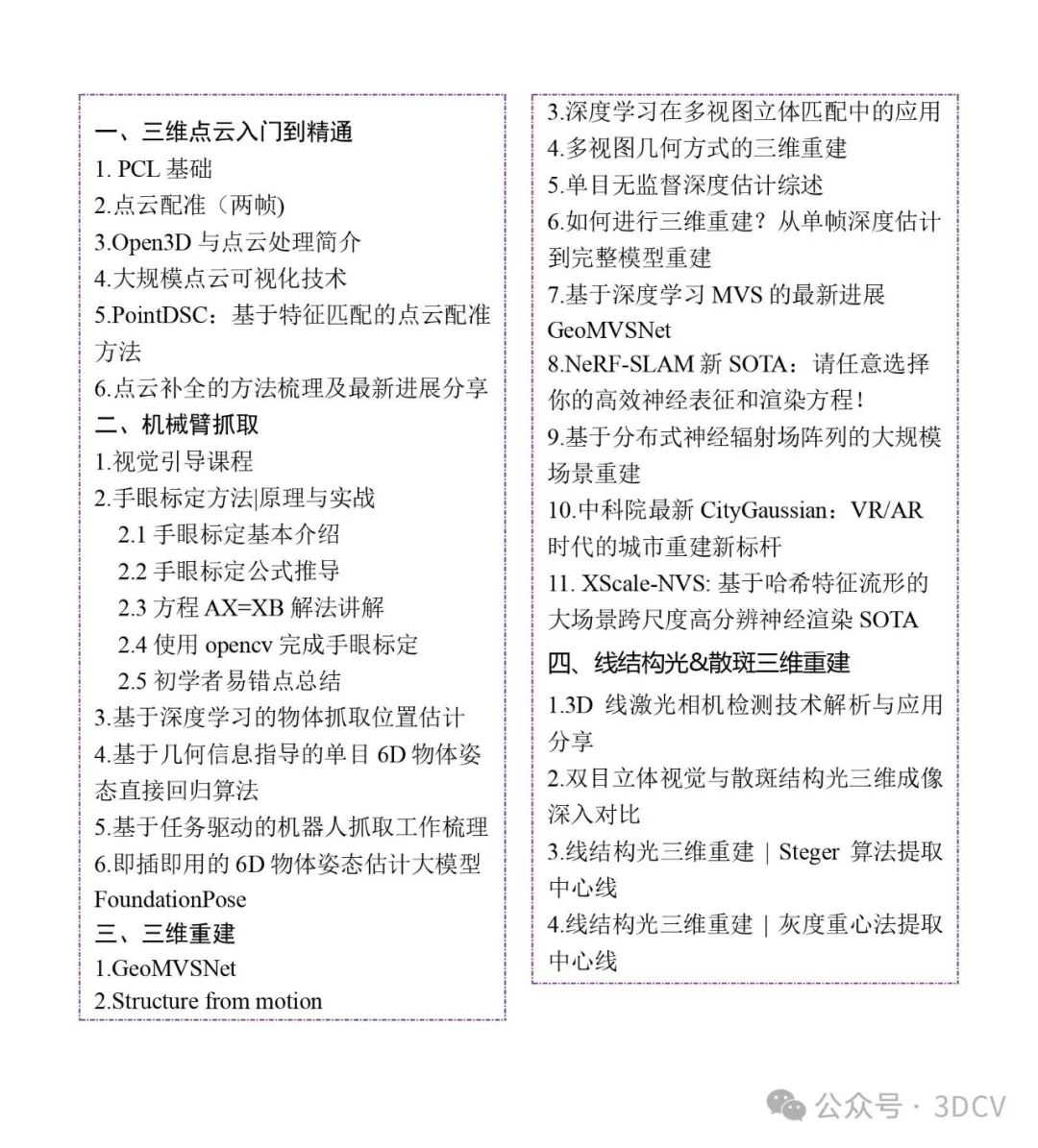
机械臂抓取(手眼标定、6D位姿估计、视觉引导、物体抓取位置估计)、三维点云、线结构光&散斑三维重建课程、三维重建(多视图几何、SFM等)
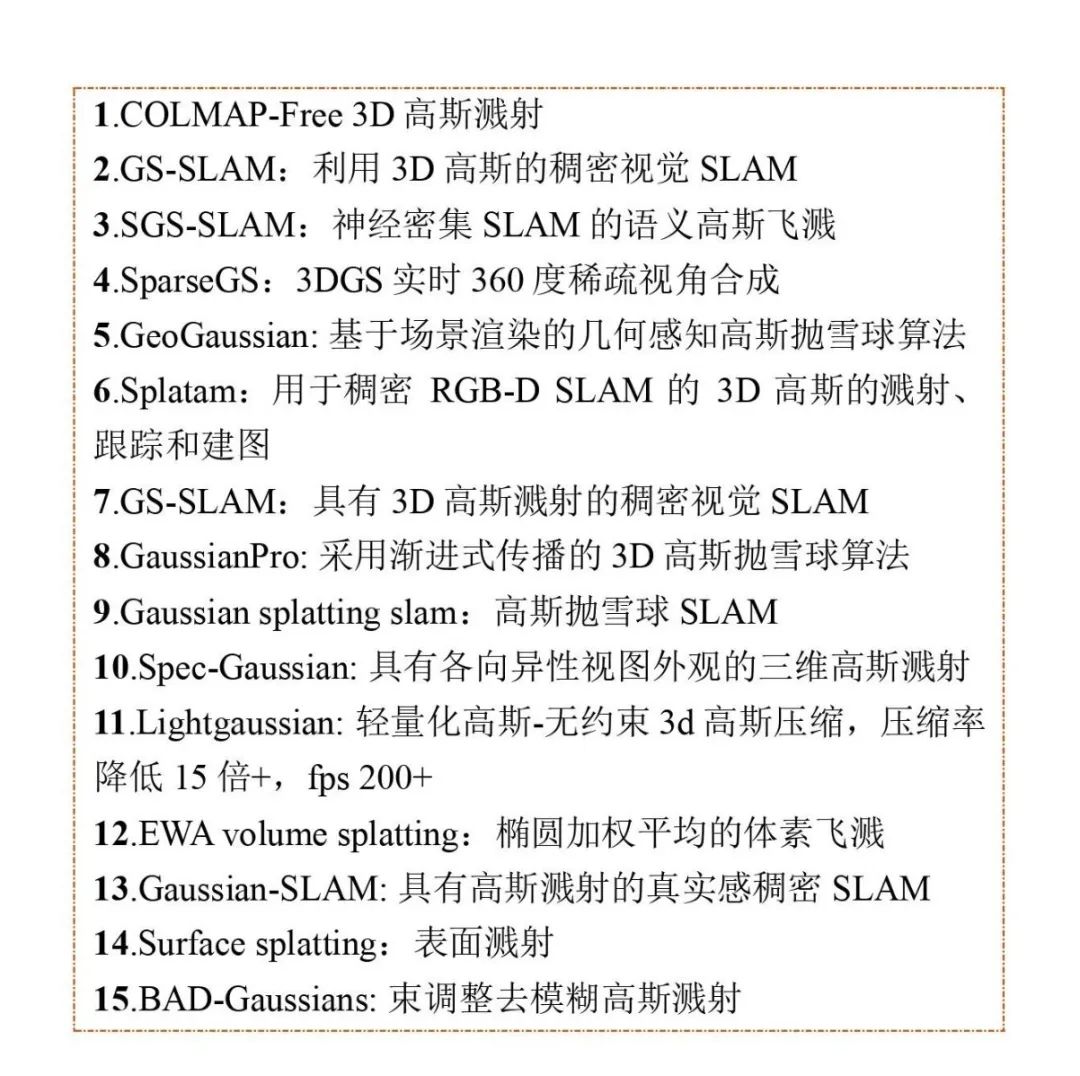
三维重建(3D高斯系列视频)
微信扫码加入,最后一天福利

SLAM系列视频
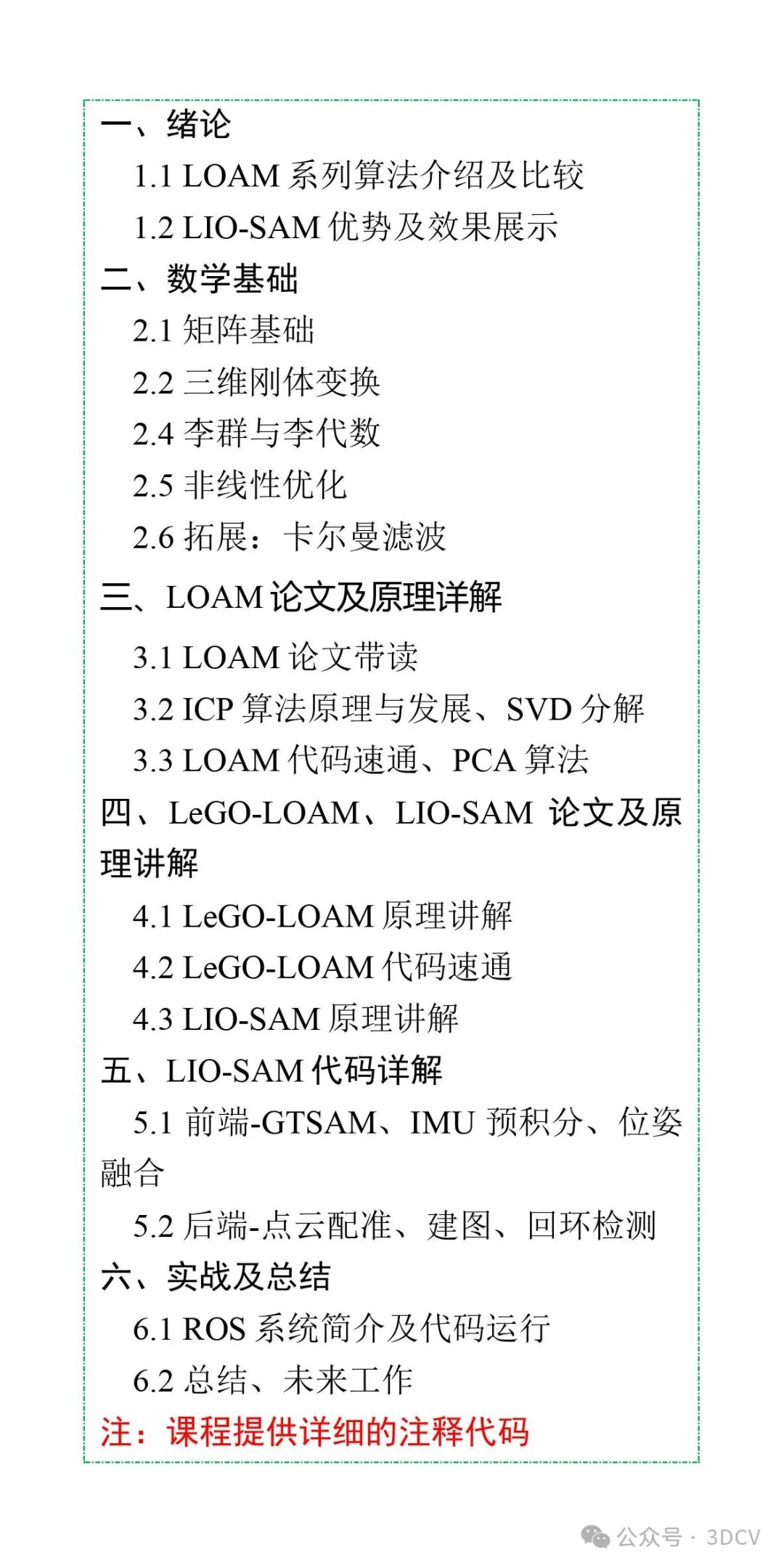
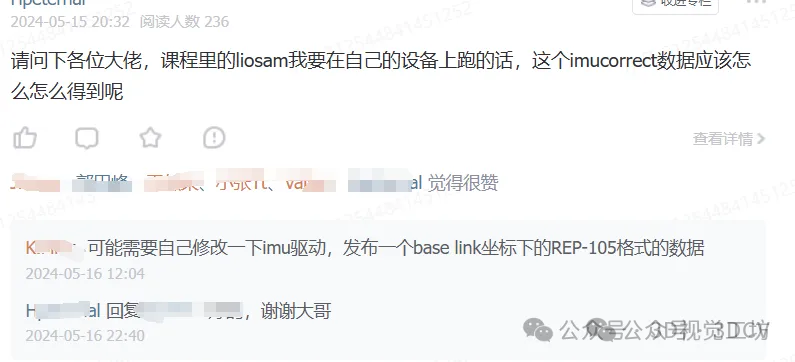
如何轻松拿捏LIO-SAM?(提供注释版本代码)
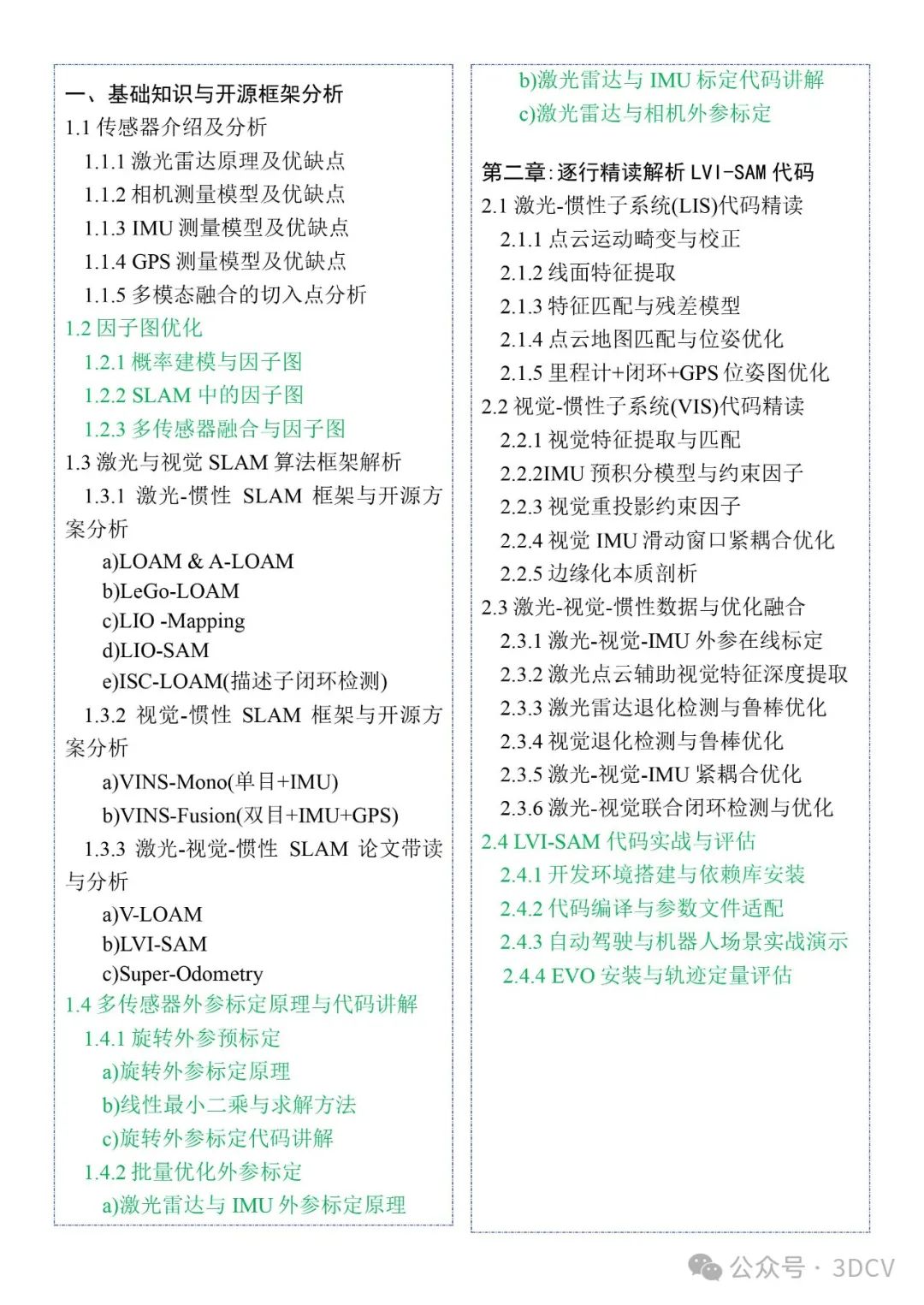
彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战系列视频
多模态融合 SLAM 的门槛较高,在需要视觉 SLAM 与激光 SLAM 的基础之外,还会遇到不同模态测量的融合,不同传感器的时间同步,多传感器的外参标定,多传感器异常检测等问题,使得各位同学做这块的时候遇到诸多障碍。因此我们联合机器人学国家重点实验室的博士大佬推出这门课程,从理论和代码实现两个方面对激光雷达-视觉IMU-GPS 融合的 SLAM 算法框架和技术难点进行讲解,并且博士大佬会根据自己多年的机器人工程经验,向大家讲解在实际机器人应用中多模态融合的方法和技巧。
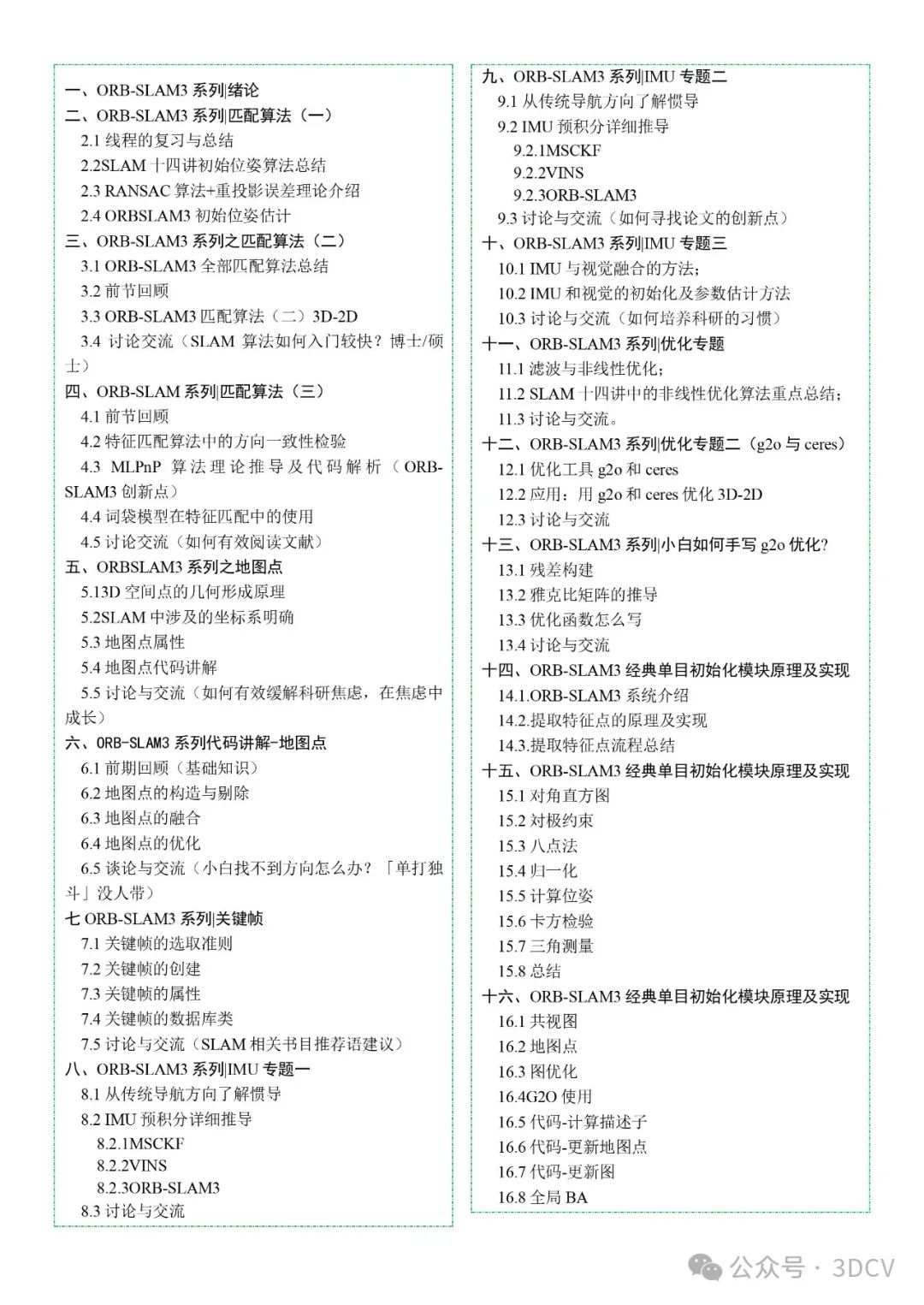
ORB-SLAM3理论基础+关键技术详解
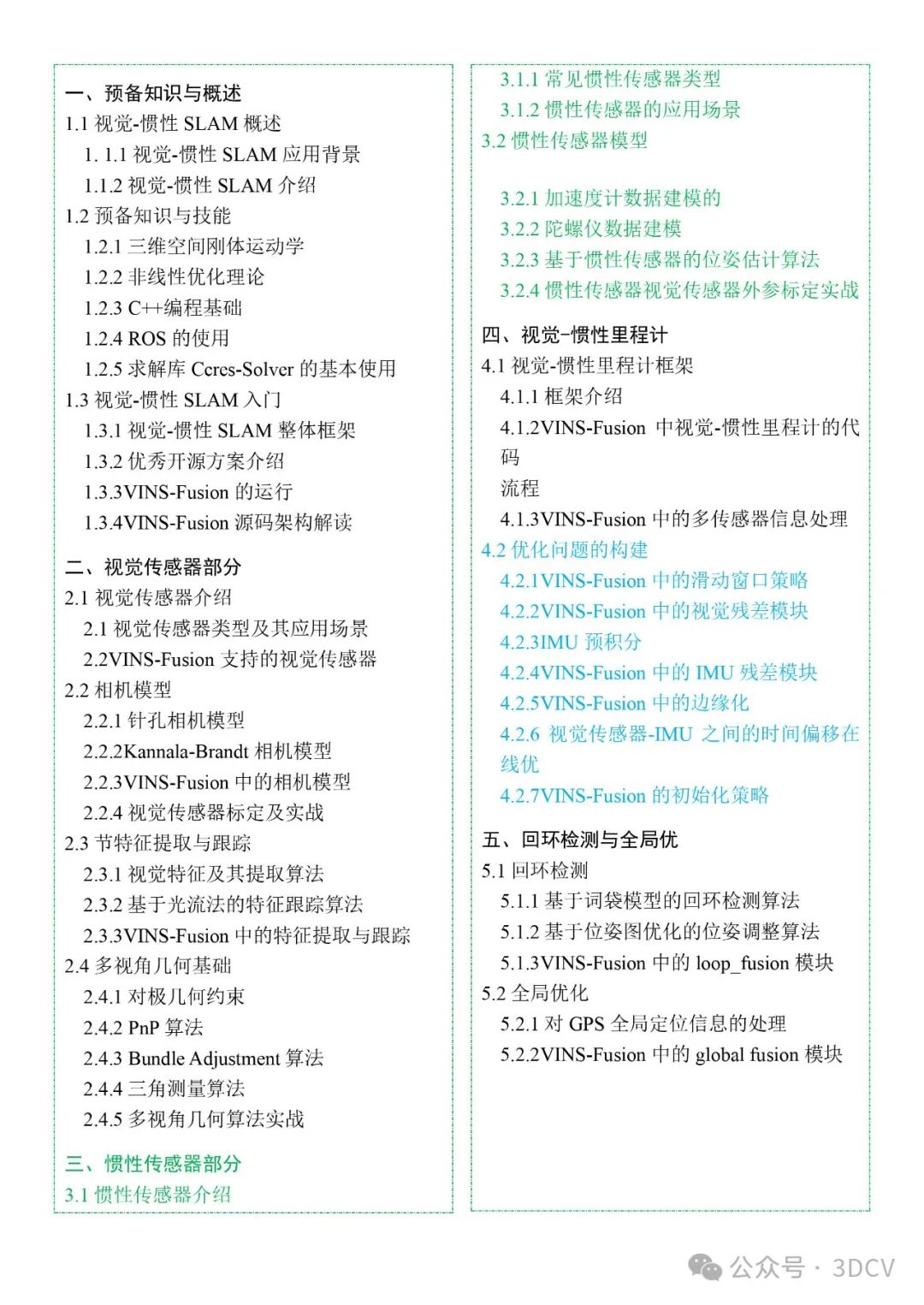
视觉-惯性SLAM:VINS-Fusion原理精讲
视觉-惯性SLAM所涉及的理论深度较深、覆盖面广,并对工程实践能力要求也较高,新手自学时相对比较困难。当下虽然有很多丰富的理论资料和优秀的相关开源项目,但是许多童鞋面对海量的理论资料、复杂的开源项目时可能无从下手,前期学习曲线过于陡峭,不得不放弃继续深入。为此,我们推出了《视觉-惯性SLAM的入门与实践》课程,结合VINS-Fusion 源码,系统地对视觉-惯性 SLAM 的基础理论知识进行梳理。整套课程由一线算法工程师教授,从基础理论到代码剖析,保姆级教学,助力学员一步步从小白成长为大牛。
自动驾驶系列视频
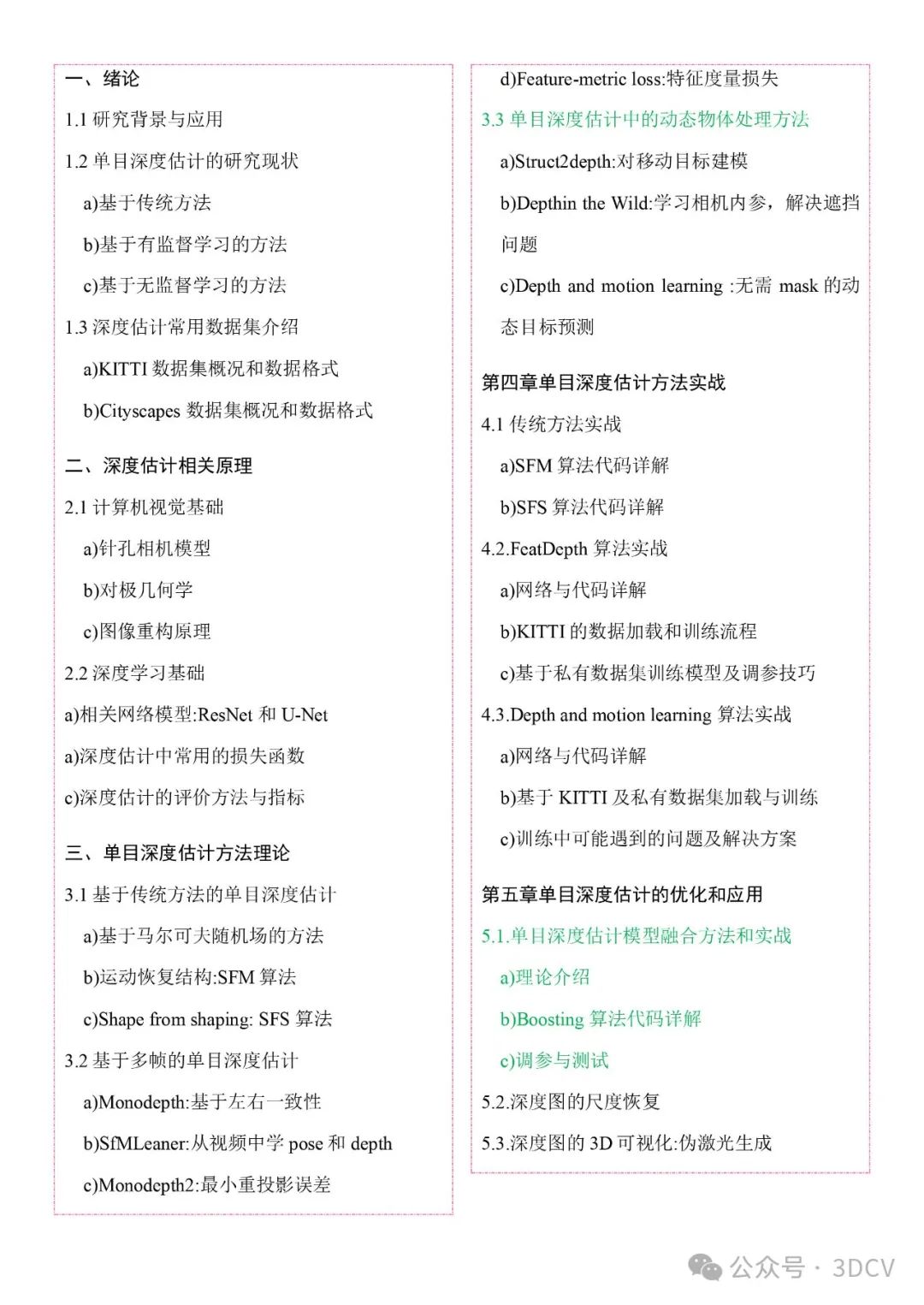
单目深度估计方法:理论与实战视频
视频教程主要分为两大部分:理论篇和实战篇,由于有监督方法的深度真值获取困难,且无监督方法的效果与有监督方法几乎相当,我们将课程的重心放在了无监督方法上。
其中,理论篇主要包括:深度估计相关的损失函数、评价指标等基础理论,传统深度估计方法、无监督深度估计方法等理论知识。实战部分包括:传统深度估计方法和深度学习方法,偏向于无监督深度估计以及相关应用等等。
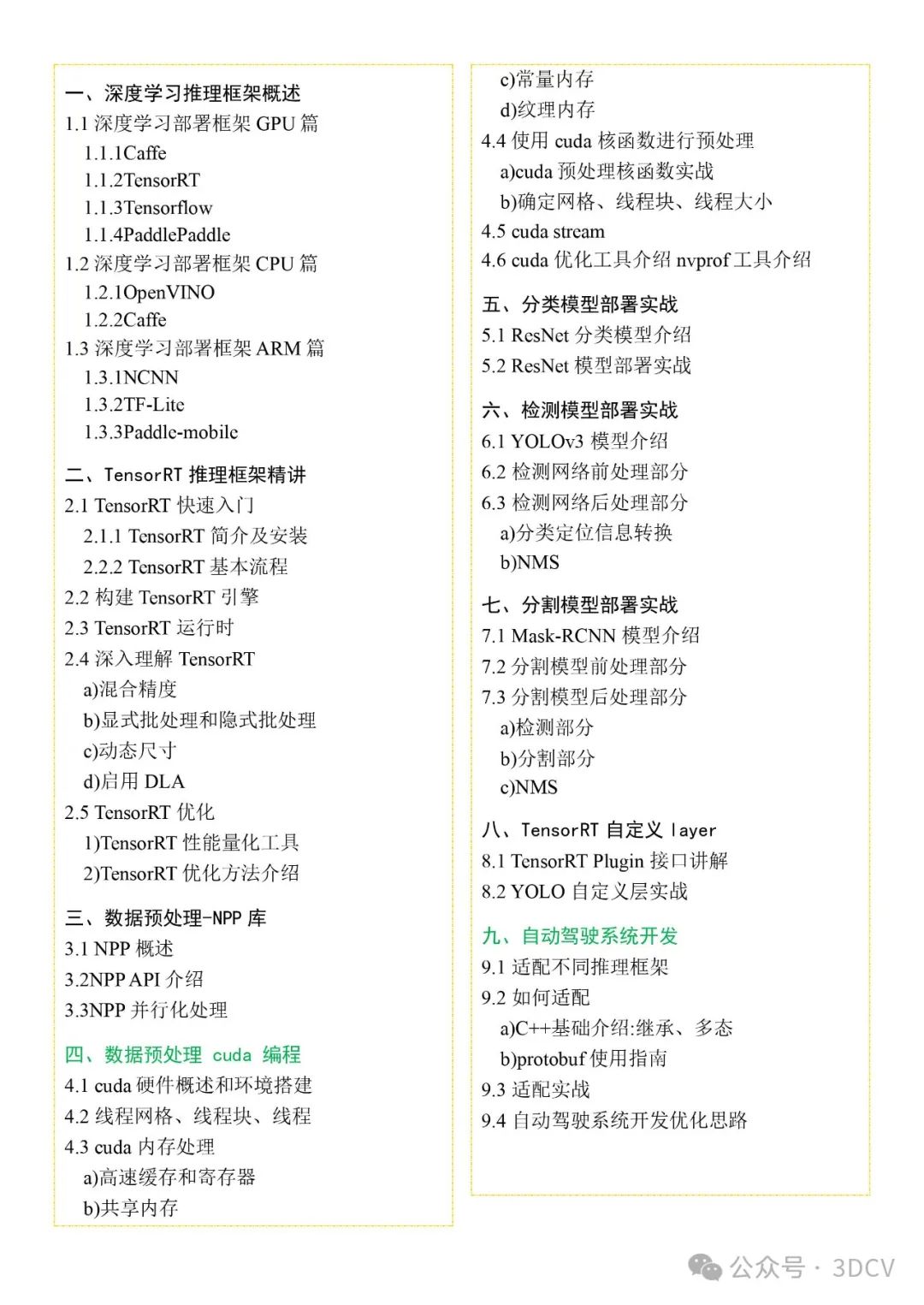
自动驾驶中的深度学习模型部署实战视频
本视频教程将采用理论和实践相结合的思路,首先对TensorRT的编程模型以及GPU/cuda的相关知识进行讲解,带领大家达到知其所以然的程度;之后课程将用分类、检测、分割三个例子来展示详细编程流程,并给出相关代码,达到真正能落地的工业级分享。
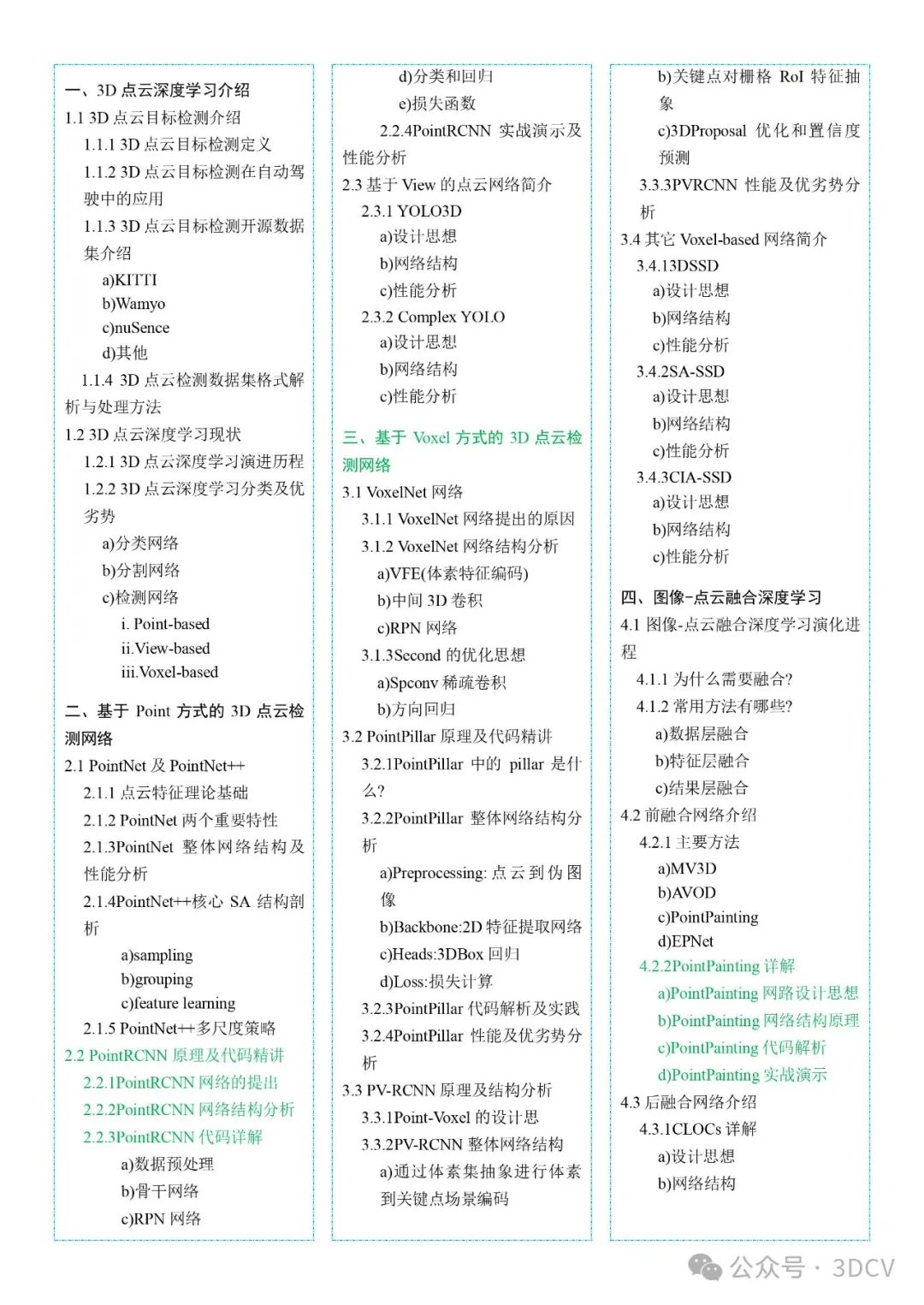
面向自动驾驶领域的3D点云深度学习目标检测系列视频
本视频教程以3D点云深度学习为主,对Point-based和Voxel-based系列的3D目标检测网络架构进行系统剖析和代码梳理,助力各位同学在点云深度学习更快的入门和更深的理解。
星球内部项目对接
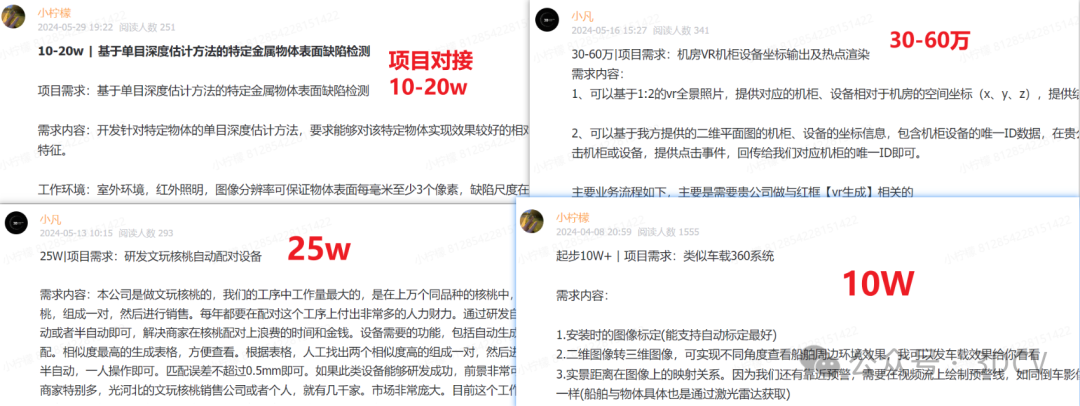
注:篇幅有限仅作部分展示,更多项目对接加入星球即可查看
微信扫码加入,最后一天福利

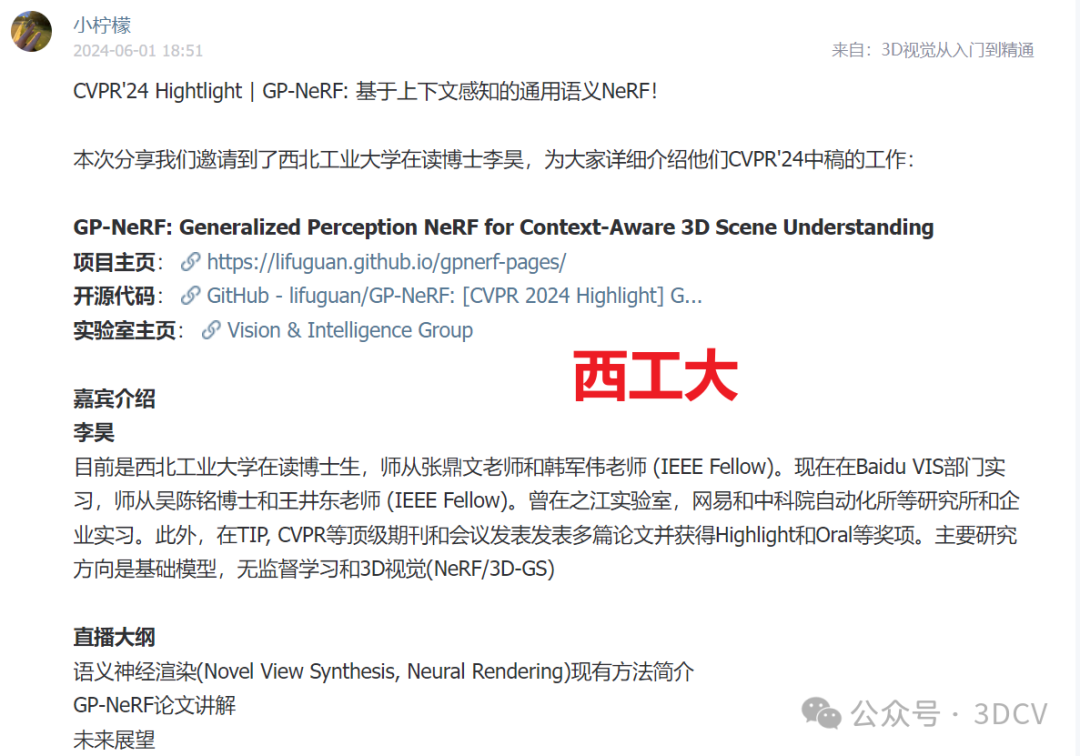
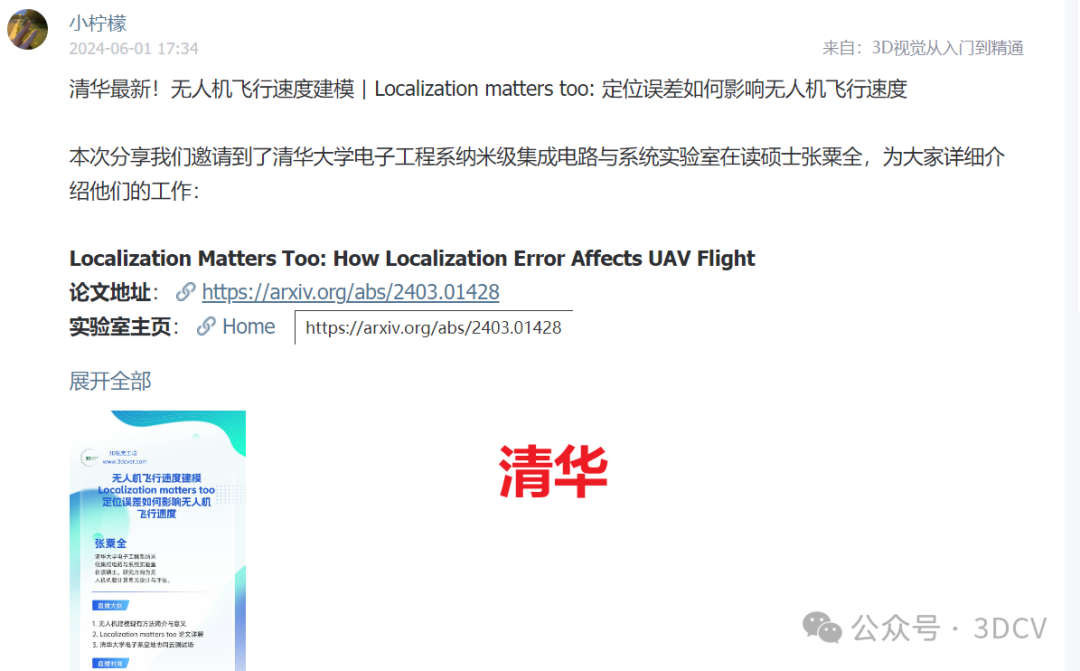
最前沿顶会论文一作讲解
除了日常的分享,我们星球内部会不定期邀请各类顶会顶刊一作以及海内外各大顶尖公司团队做直播分享,方向包括但不限于工业3D视觉、自动驾驶、三维重建、SLAM等多个子方向!目前星球内已经积累了大量的视频讲解,加入星球即可学习,因篇幅有限列举部分示例:




3D高斯系列论文汇总

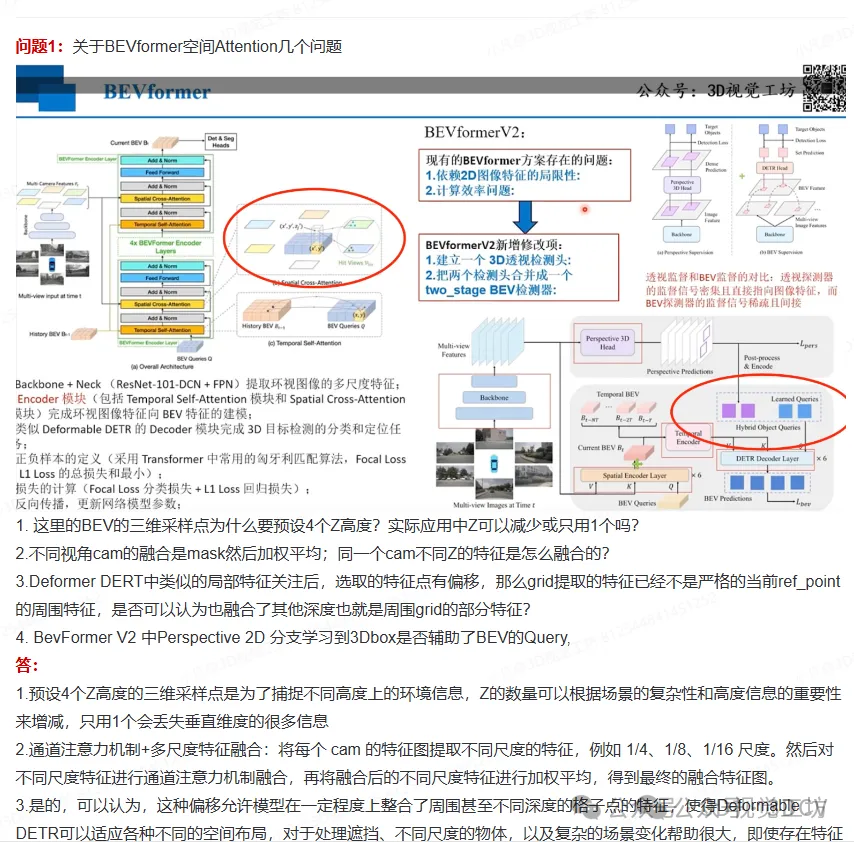
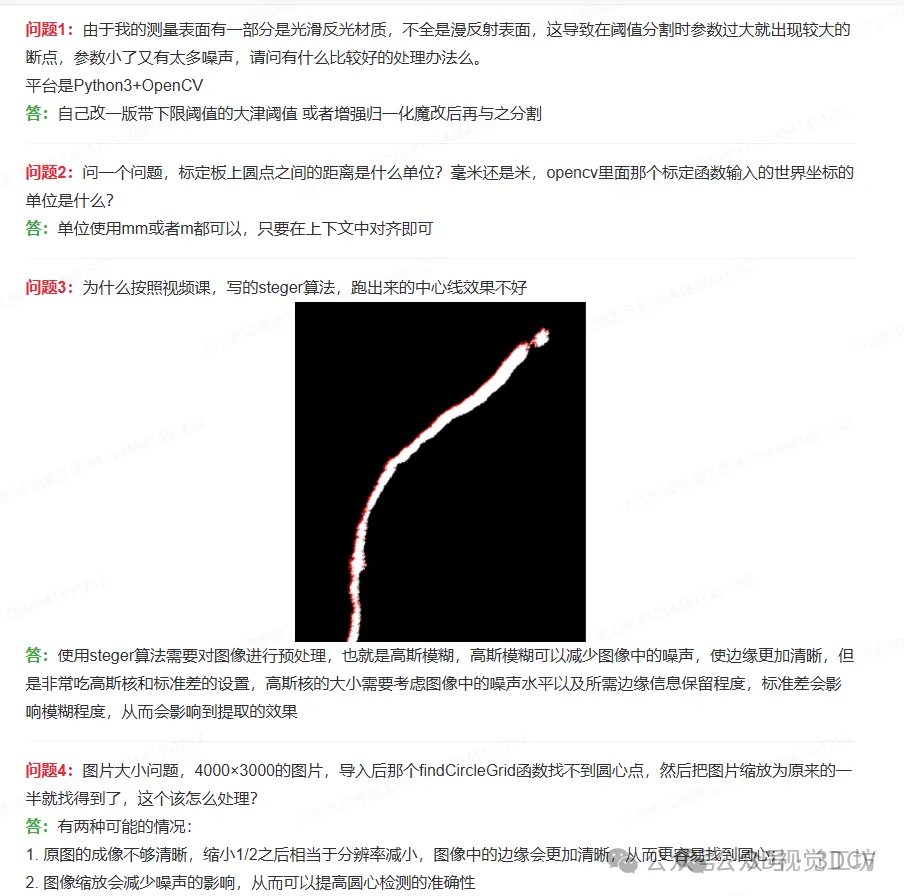
3D视觉方向自研精华问答
因篇幅有限下面仅作部分展示:
BEV&Occ
无人机

相位偏折术
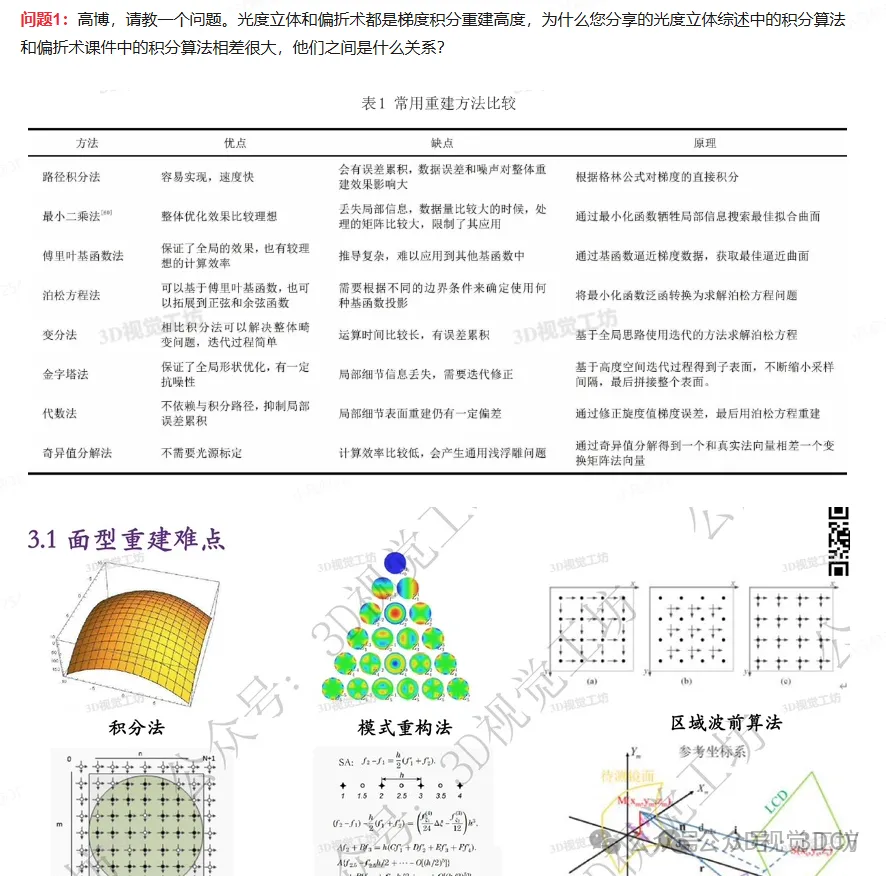
三维重建

微信扫码加入,最后一天福利

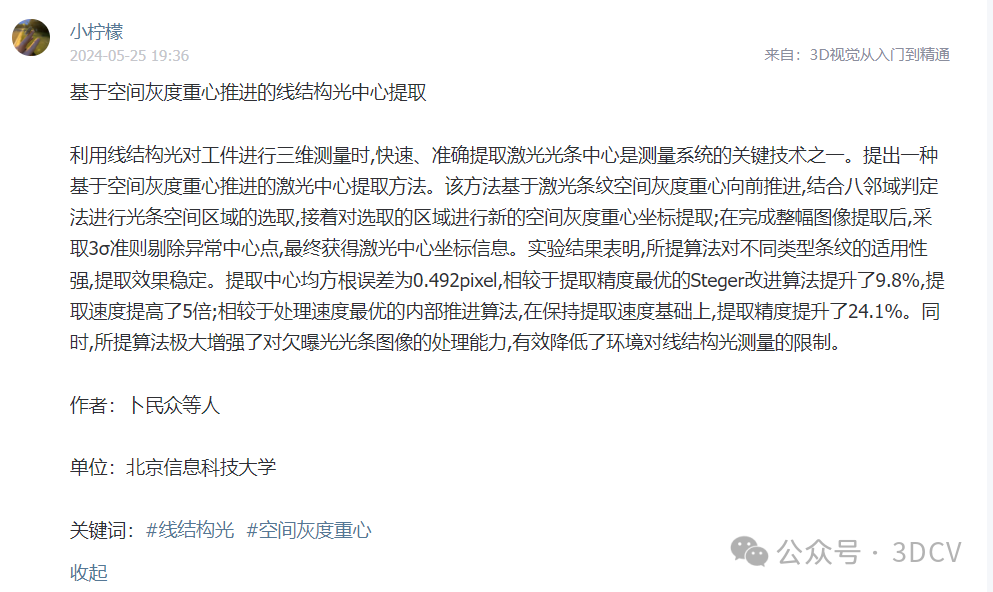
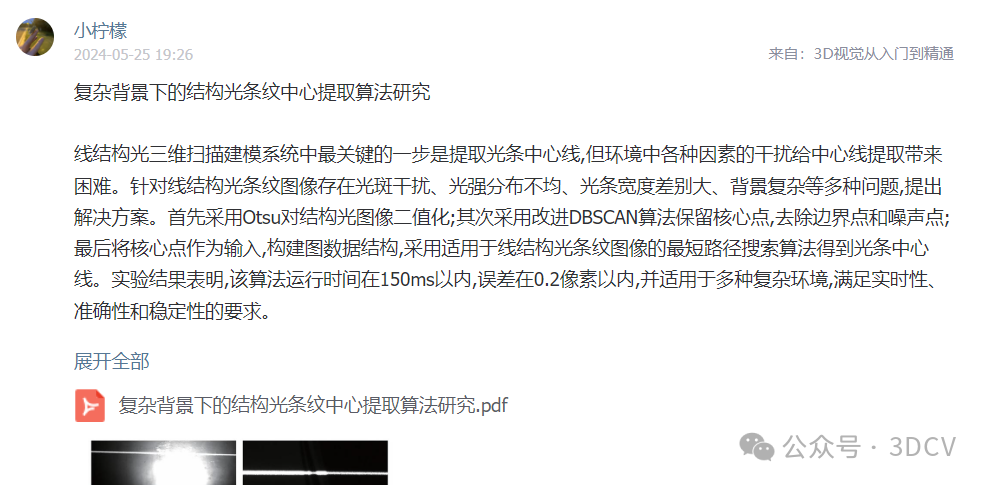
线结构光
3D视觉顶会期刊汇总

7大类别文档教程
最新3D行业模组分享
因篇幅有限,仅作部分展示:

优质书籍干货分享
因篇幅有限,仅作部分展示:



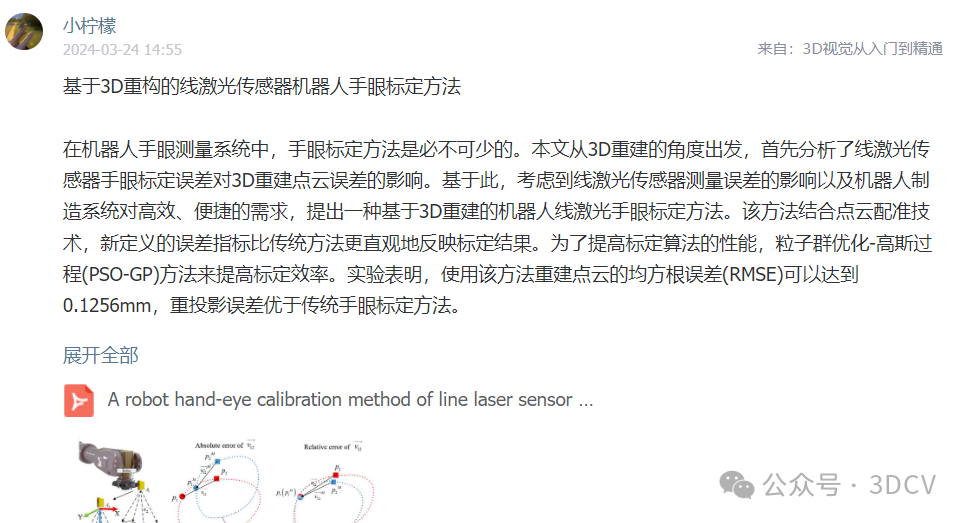
最新论文&代码
因篇幅有限,仅作部分展示:

2D/3D标注工具汇总
2D/3D数据集汇总
星球专属福利
星球内不定期发送专属福利,仅限星球成员,因篇幅有限,仅作部分展示:
专业的问题解答团队
因篇幅有限,仅作部分展示:

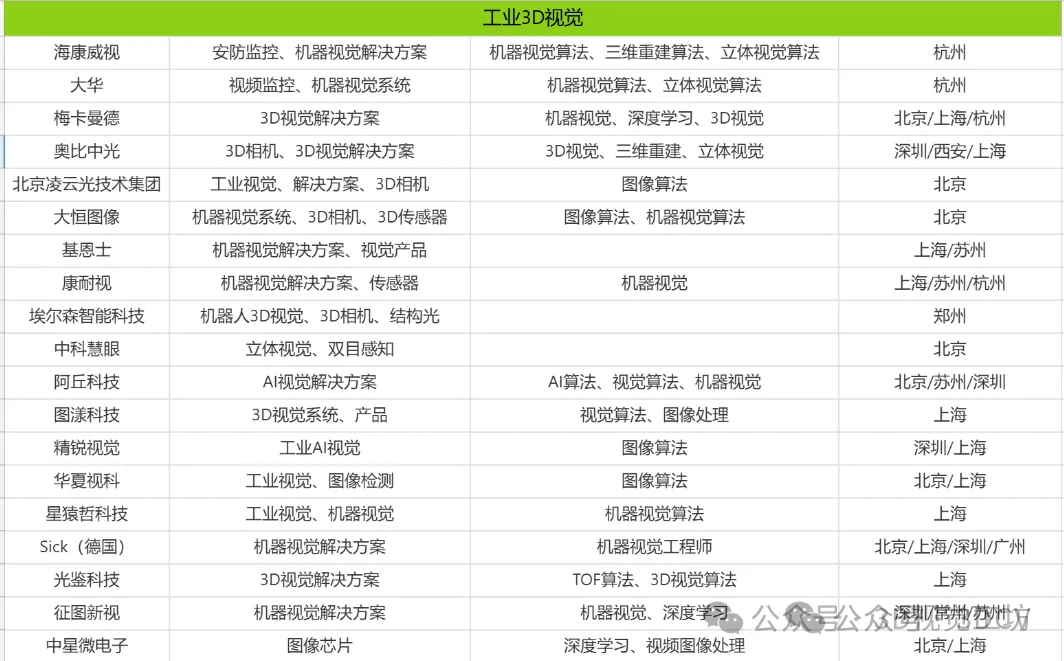
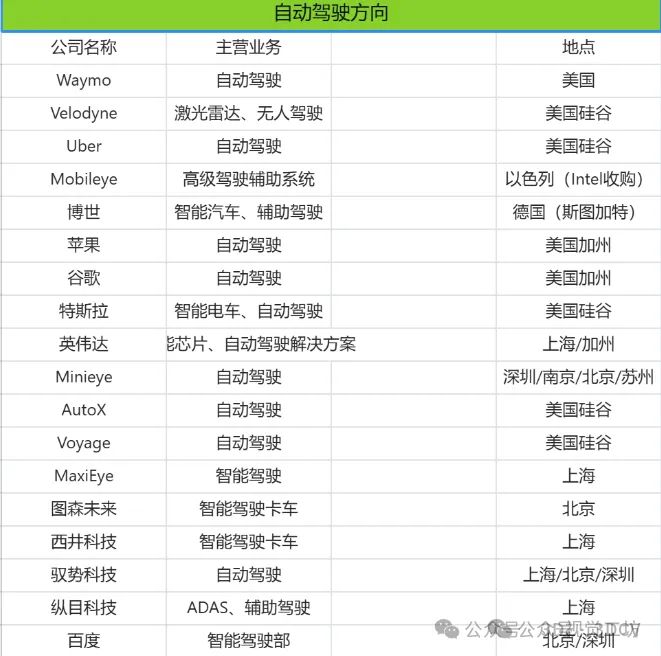
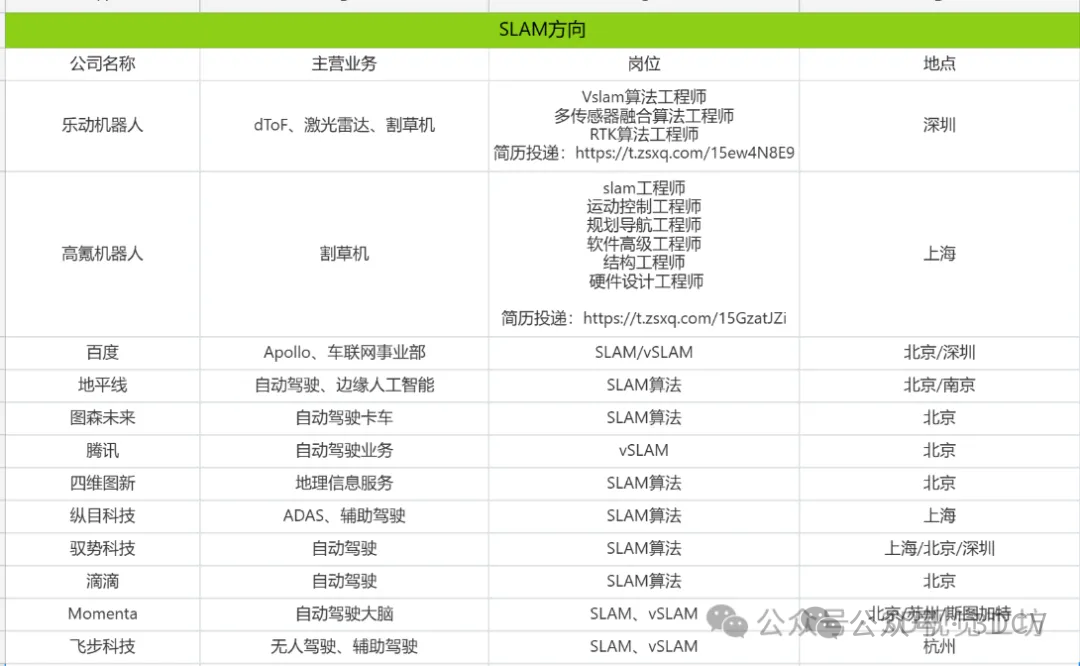
海量的3D视觉行业招聘信息&面经
星球成员
星球汇集了国内外各个高校的研究生、博士生,包括但不限于清华大学、上海交通大学、华中科技大学、中国科技大学、武汉大学、南京大学、北京理工大学、北京航空航天大学、香港科技大学、香港理工大学等;以及国外留学的小伙伴,主要就读于南加州大学、墨尔本大学、慕尼黑工业大学、亚琛工业大学、南洋理工大学、京都大学、苏黎世联邦理工、密歇根大学等。除此之外,还有很多一线工作的算法工程师、开发人员,包括但不限于百度、旷视、华为、奥比中光、先临三维、跨维智能等,和大家进行日常交流。
星球嘉宾
3D视觉从入门到精通知识星球是一个技术社区,在这里你可以讨论任何3D视觉相关的难题、前沿技术。星球邀请了国内外顶尖高校博士、CV独角兽公司CTO/CEO、以及各大厂的算法工程师解惑。在这里,你可以一对一和大佬交流,提出自己在工作学习上的疑问。
星球合作企业
知识星球现已和众多公司建立了良好的合作关系,公司内的算法负责人会不定期的来内部进行前沿技术/产品分享,除此之外,星球也为公司推荐合格的算法/开发人才。现有合作企业包括但不限于:梅卡曼德、先临三维、跨维智能、奥比中光、视比特科技等~
除此之外,星球也为公司推荐合格的算法/开发人才。
星球会员权益
项目、学习、求职中遇到的问题,免费获得解答。
免费学习星球视频课程。
星球每月之星会给予丰厚的现金奖励。
优先承接来星球内部项目对接。
官网课程:www.3dcver.com,星球有效期内的成员均可享原价的八五折特惠。
免费学习星球内分享的最新论文解读和代码。
优先获得3D视觉企业内推资格。
可在星球内快速找到志同道合的学习伙伴,不再单打独斗,抱团取暖,走得更快更远。
不定期星球内部会组织项目实训,包括相机标定、机械臂抓取、三维重建、g2o优化等
加入知识星球
欢迎大家加入3D视觉从入门到精通知识星球,是否适合自己只有亲自体验一下才知道!也许这是你今年对自己最值的一笔投资。
微信扫码加入,最后一天福利


















 3713
3713

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









